全自动驾驶模式对地铁工程造价的影响分析
2019-07-19王文伟
王文伟
摘要:文章通过对全自动驾驶地铁与有人驾驶地铁之间全面整体的差异分析,划分了主要差异因素,并分析了不同差异因素的主要新增功能和增强功能,进而得出相应的工程造价指标差异数值,为分析全自动驾驶模式与有人驾驶模式地铁工程造价的主要差异提供参考。
Abstract: The paper divides the main difference factors through the analysis of the difference between the fully automatic operation subway and the manned subway. It also analyzes the main new functions and enhancement functions of the main difference factors, and then obtains the corresponding engineering cost index difference value. This paper provides reference for the engineering cost difference analysis between the fully automatic operation subway and the manned subway.
关键词:地铁项目;全自动驾驶;工程造价
Key words: subway project;full automatic operation;engineering cost
中图分类号:TU723.3 文献标识码:A 文章编号:1006-4311(2019)09-0037-03
0 引言
全自动运行系统是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通系统。近年来在世界轨道交通领域上全自动驾驶地铁逐渐升温,国外许多城市的地铁均已引入了无人驾驶系统,如哥本哈根、洛桑、温哥华、巴黎等等[1-2]。与传统有人驾驶系统相比,全自动驾驶有利于提高系统安全性、可靠性、可用性,保障大客流轨道交通的安全运营,挖掘线路运营能力,优化运营模式,提升线路自动化水平,降低运营人员的劳动强度,提升运营服务水平,因此全自动驾驶技术是国内未来地铁建设发展的趋势和技术制高点,是我国地铁发展的必然结果[2]。相比其他市政工程而言,地铁工程涉及专业多、建设周期长、造价高,制约地铁工程可持续发展的主要因素之一就是其巨大的工程投资。而且相关方也高度关注引人全自动驾驶模式所带来的地铁工程投资差异。在此大背景下,研究全自动驾驶模式与传统驾驶模式之间工程造价的差异意义重大。
1 造价指标差异分析
相比传统有人驾驶模式的地铁,全自动驾驶地铁不仅减少了人为误操作,提升了运营组织的灵活性及运营效率,而且在舒适性与节能方面也有极大的改善,全面提升了地铁的全自动化程度,真正实现了无人干预的无人驾驶地铁运行模式。全自动驾驶系统是涉及到土建、设备系统的综合性工程,需要线路、行车组织、车辆、信号、通信、综合监控、车辆基地等多个专业进行统筹协调设计、紧密配合。基于全自動驾驶系统高安全性、高可靠性、高可用性的特点,这就对相关系统及土建工程提出了更高的要求,势必会导致建设成本增加。
无人驾驶模式地铁与有人驾驶模式地铁二者之间的主要差别在于地铁车辆、通信系统、信号系统、综合监控系统、站台门系统及车辆基地等,具体分析如下[3-4]:
1.1 车辆
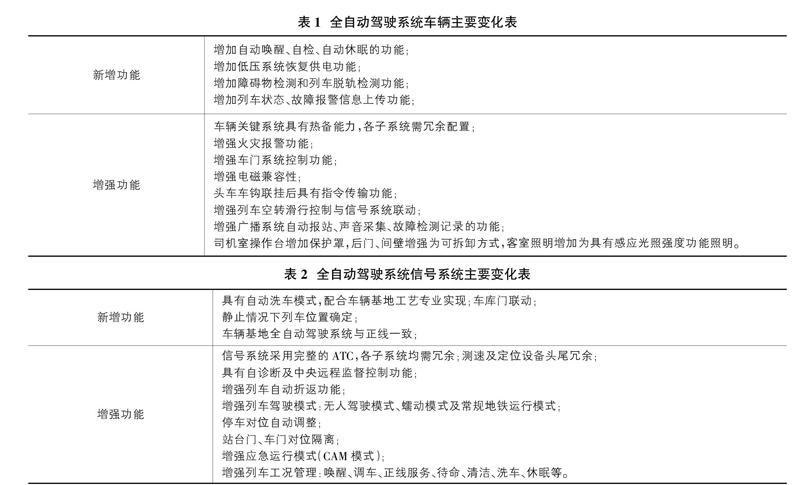
车辆是全自动驾驶地铁系统的运动载体与核心,整个系统均需始终围绕“如何实现车辆安全、可靠、高效的全自动运行”而展开。相比传统有人驾驶系统,全自动驾驶系统车辆的功能需求主要是列车驾驶控制功能、列车停车控制功能、列车自动唤醒与休眠功能、车门/站台门联合控制功能、后备蠕动功能、广播数据与传输功能、火灾报警功能、障碍物监测功能、远程控制功能。
与常规地铁列车相比,全自动驾驶车辆主要变化详见表1;全自动驾驶地铁车辆新增功能及增强功能导致其比常规列车每辆车增加约150万元。假设6B编组的地铁线,初期配属车30列,若采用全自动驾驶模式,则地铁车辆购置费增加的工程投资约为150×30×6=27000万元。
1.2 信号系统
全自动驾驶相比传统有人驾驶系统,对于信号系统的要求主要是提高硬件设备的冗余和可靠性,增加与全自动驾驶系统相关的驾驶模式和功能,增强与综合监控、站台门等系统的接口功能,增加与车辆基地洗车机自动洗车的功能等;全自动驾驶的信号系统需要增加的设备配置主要包括:①站台门两端处和车站控制室IBP盘上增设关门按钮;②正线停车线、车辆基地停车列检库增设精确停车应答器,并配置列车在停车线休眠唤醒后的静止列车定位应答器或相关定位设备;③车载ATC设备增设休眠唤醒模块,并增设车载ATC与车辆之间的冗余接口;④车辆基地增设ZC区域控制器设备、自动化区增加无线传输设备;⑤增设与车辆基地洗车机的接口;⑥信号系统增设与正线、车辆基地人员防护开关(SPKS)的接口。全自动驾驶信号系统主要变化详见表2;全自动驾驶地铁信号系统新增功能及增强功能导致其比传统模式信号系统每正线公里增加约250万元。假设6B编组的地铁线,线路长30km,标准站间距,若采用全自动驾驶模式,则地铁信号系统增加的工程投资约为250×30=7500万元。
1.3 通信系统
无论是全自动驾驶系统还是传统有人驾驶系统的轨道交通线路,通信系统均由传输、公务电话、专用电话、无线通信、时钟、广播、视频监视、通信电源及接地、集中监测告警等子系统组成。但相比传统有人驾驶系统,关键的通信系统设备应采取冗余设计,提高系统的可用性和稳定性,增强与其他系统的接口功能。全自动驾驶通信系统需要增加与车载乘客紧急对讲的功能及后备控制中心,增强了视频监控的范围和功能。全自动驾驶通信系统主要变化详见表3;全自动驾驶地铁通信系统新增功能及增强功能导致其比传统模式通信系统每正线公里增加约30万元。假设6B编组的地铁线,线路长度30km,标准站间距,若采用全自动驾驶模式,则地铁通信系统增加的工程投资约为30×30=900万元。
1.4 综合监控系统
相比传统有人驾驶系统,采用全自动驾驶模式的线路,综合监控系统在完成常规轨道交通线路的所有功能的基础上,还应增加一套完整的后备控制中心,同时增加与增强相关系统的接口及联动功能。全自动驾驶综合监控系统主要变化详见表4;全自动驾驶地铁综合监控系统新增功能及增强功能导致其比传统模式综合监控系统每正线公里增加约30万元。假设6B编组的地铁线,线路长度30km,标准站间距,若采用全自动驾驶模式,则地铁综合监控系统增加的工程投资约为30×30=900万元。
1.5 站台门系统
相比传统有人驾驶系统,采用全自动驾驶模式的线路,站台门系统在完成常规轨道交通线路的所有功能的基础上,还应实现站台门滑动门与列车车门对位隔离功能。简而言之,就是即将进站的地铁车辆若发生故障,车门无法正常开启,则进站停车时与该地铁车辆故障车门相对应的站台门滑动门应能保持锁闭不开启(即对位隔离);相应的,若车站内的某一站台门被人工锁闭隔离或者发生故障无法正常开启时,则所有进站的地铁车辆与之对应的车门均能保持锁闭状态,不参与停车时的开关门作业;上述功能通过信号系统与站台门系统的接口实现。此外,为提高全自动驾驶模式下乘客上下车的安全性,相比常规轨道交通线路工程应进一步增加防护安全措施,增设安全防护装置。
综上,相比传统有人驾驶系统,全自动驾驶的站台门系统主要是增加了乘客防夹人检测系统,与信号增加了车门、站台门的对位隔离功能。全自动驾驶站台门系统主要变化详见表5;全自动驾驶地铁站台门系统新增功能及增强功能导致其比传统模式站台门系统,每个门单元增加约2万元。假设6B编组的地铁线,全线24个车站,若采用全自动驾驶模式,则每个车站的站臺门系统增加的费用约为6×8×2=96万元,全线站台门系统增加的工程投资约为96×24=2304万元。
1.6 车辆基地
相比传统有人驾驶系统,车辆基地主要是结合全自动驾驶系统对场段的需求,优化车辆段/停车场的站场、车库线路的布局,增加相应的隔离措施等。全自动驾驶系统车辆基地主要变化详见表6;从表中可以看出,全自动驾驶地铁的车辆基地新增功能和增强功能中相关信号、通信及综合监控等系统的变化已经在前面的造价指标差异分析中考虑,单纯针对车辆基地章节增加的造价主要体现在停车列检库的规模变化,导致房屋土建风水电的费用增加、分区增加的防护围栏费用以及新增的门禁系统费用;相比传统驾驶模式,全自动驾驶模式下车辆基地增加的投资约为(0.42万元/m2×房屋增加面积m2+0.05万/m×防护围栏增加长度m+40万/车辆段或停车场(增设的门禁系统))万元,一般情况下,全自动驾驶模式下车辆段和停车场停车列检库的面积分别会增约2000~3000平米。假设6B编组的地铁线,设有1个车辆段和1个停车场,采用全自动驾驶模式下,车辆段和停车场房屋分别增加3000平米,车辆段和停车场防护围栏的长度分别增加5000m,则增加的工程投资约为0.42×3000×2+0.05×5000×2+40×2=3100万元。
综上分析可知,全自动驾驶与传统有人驾驶地铁相比,造价差异情况主要在于上述分析的几个方面,具体详见表7;从表中也可以看出,表中所列差异当中,对造价影响最大的是车辆购置费以及信号系统增加的投资。通过表7所列的造价指标差异,结合具体地铁项目相关设计资料,即可快速测算出采用全自动驾驶模式所增加的工程投资。
2 结语
通过以上分析和研究,文章得出了全自动驾驶系统与传统有人驾驶系统之间的地铁工程造价指标的主要差异,其中信号系统与车辆系统的造价指标差异较大,是影响两种模式之间造价差异的主要因素。文章所确定的主要造价指标差异公式,计算简单,结果科学合理,具有较强的实用性,对于快速测算、定量比较全自动驾驶地铁与有人驾驶地铁两种方案之间的工程造价差异,具有一定的理论与现实意义。
参考文献:
[1]UITP. Statistic Brief_World Metro Automation 2016[R]. Belgium:UITP, 2016.
[2]路向阳,李雷,雷成健,马伟杰,周开成.城市轨道交通全自动驾驶发展综述[J].机车电传动,2018(1): 6-12.
[3]谢正媛,李月.城市轨道交通全自动运行系统应用研究[J].数字技术与应用,2018,36(2):53-54.
[4]冉杰.城市轨道交通全自动驾驶通信系统设计方案[J].铁道通信信号,2018,54(2):89-91.
