智能水面监测清理设备的研制
2019-07-16李天翔周海燕谢深炎韦荣叶慧玉石仗
李天翔 周海燕 谢深炎 韦荣 叶慧玉 石仗
摘要:近几年,我国水域污染问题不容乐观,各处水域垃圾漂浮现象随处可见。目前,水域垃圾的清理方式大多采用水面人工打捞与机械清理为主,成本也相对较高。为此,我们将设计一种水面清理船,使用风光清洁能源发动,既能进行水域水质的监看、水域污染度的监测以及垃圾的自主化清理,并且能通过无线数据传输,将清理船搜寻到的信息、水域的情况以及自身的状态信息传回地面站,可通过移动终端实时查看清理船的状态信息,了解分析水面状况;并且地面站能设置遥控和自动巡航两种模式,可实现清理船的自动巡航、一键返航等众多功能。
关键词:水面清理;水域检测;无线传输;自动巡航
中图分类号:TN873 文献标识码:A
文章编号:1009-3044(2019)15-0261-02
Abstract: In recent years, the problem of water pollution in China is not optimistic, and the phenomenon of garbage floating in various waters can be seen everywhere. At present, the cleaning methods of waters in the waters are mostly based on manual salvage and mechanical cleaning, which is more costly. To this end, we will design a surface cleaning vessel that uses wind and clean energy to launch, monitor water quality,monitor the pollution of the waters, and autonomously clean up the garbage. It can also clear the information and waters found by the ship through wireless data transmission. The situation and its own state information are transmitted back to the ground station, and the status information of the cleaning ship can be viewed in real time through the mobile terminal to understand the analysis of the water surface condition; and the ground station can set two modes of remote control and automatic cruise, which can realize many functions such as returning the keys and automatic cruise of the cleaning ship.
Key words: water surface cleaning; water area detection; wireless transmission; automatic cruise
1 前言
隨着经济和工业水平的日益增长,国人对生活品质的追求也越来越高。但是在发展生产力的同时,环境也受到了一定的污染,我国水域垃圾漂浮现象日益严峻。漂浮垃圾在各大水域都已随处可见,这不仅危害居民的身心健康,而且影响了生态景观。
漂浮垃圾主要漂浮在水库、河道、湖泊和近海等水域。这类废弃物在危害环境的同时还影响着市容市貌。漂浮垃圾主要来源包括塑料袋、饮料罐等各类生活垃圾,其中以游客在游船上抛弃的垃圾和大风把陆地上的塑料垃圾吹进海域为主。
目前,处理水域垃圾的方式比较单一,主要由机械清理或水面人工打捞清理。机械清理主要利用水面垃圾清理船,这种方式适用于大面积的水面漂浮垃圾区域,其主要优势是工作效率高,能清理大面积海域,能够处理的垃圾量大。但与此同时的是,这种船只耗油,可能会对水域带来一定程度的污染,如果进行二次治理的话,比较耗费财力。并且传统的垃圾清理船难以清理过于分散的漂浮垃圾,这种水域也成了清理难点。因此在这种水域,人们通常采用水面人工打捞清理方式,而这种方式的成本也并不低。且不同水域的工作环境也不尽相同,在条件好点的水域,工人驾驶船只进行打捞。而对于条件差的水域,由于水势相对凶险,清洁工人通常只能在河道边进行打捞。在手工打捞方式下,清洁工人一般通过简易的垃圾打捞设备来打捞垃圾,所以通常不能对水域进行完整清理。而且有些垃圾已经开始腐烂,刺鼻的臭味会使清理工人难以忍受。
水域垃圾清理人工成本较大且危险,基于这种现状,非常有必要开发一种可控、操作性强的水面机器人来用于各种水域漂浮垃圾的清理,这类水面机器人具有十分重要的意义和广阔的应用前景。
2 国内外状况
水面清理船作为较为普遍使用的水面清理工具,最早在发达国家使用。国外相关技术比我国成熟,多个系列的清理船已逐渐成为国外治理水域,保护水域的主要设备。
国外在这方面做得比较好的有美国、土耳其、西班牙、意大利等国家。美国UMI公司研发的 dtrashCat系列清理船利用导流们、传送带、船艉传送带进行垃圾打捞。意大利GLOBECO公司研发的Dolphin生态清理船能够处理多种垃圾的收集,其中包括对大件垃圾、化学溢出物和泄露油的收集,同时它具有水体氧化处理以及探测和消防功能。它采用流线型结构设计,可用在近海使用。
在国内,近年来也生产出了一批较高质量的水面清理船。中国船舶重工集团所研发的清漂1号采用了多项先进的技术。它专为电站而设计,清洁水面使电站安全运行。它有非常大的存储空间保存垃圾,能够一次性清理和转运垃圾,可以不分昼夜工作,有较强的续航能力。中国船舶重工集团、上海水域环境开发有限公司、上海海事大学共同研发的“世纪之光”号水面清洁船,使用先进的嵌入式技术,采用电动力,同时该船配有GPS导航系统,可以实现无线网络通信。上海理工大学研发的水面清洁机器人可以采集图像,远程遥控操作。此外,还有上海电气集团研制的GC2230星河道割草船等。
对比国内外发展现状,国外的清理装置不仅设备相对先进,使用寿命普遍长,而且功能全面,自动化程度高。搭配GPS定位和对水况的实时监测能够比较好地处理紧急情况,并且使用相对较少的人力成本便可完成清洁工作。相比国外,我国清洁船发展特点是起点高,发展快,直接向智能化发展。而且具有成本低,日常维护费用低等特点,因此在出口国外也具有很大的竞争力。但是国内大部分的水面清理船都存在着船体太小,只能清理小体积漂浮垃圾;动力不足,清理时长和垃圾量都很有限【1】;可控性差,基本上都是基于嵌入式系统,没有通用计算机平台,无法自动搜索和巡航,没有较好的图像识别系统,无法在复杂河道中自主避障等缺陷。为了更好清理水面垃圾,我们选择研发自主清理,可传输控制的智能“水面清理员”。
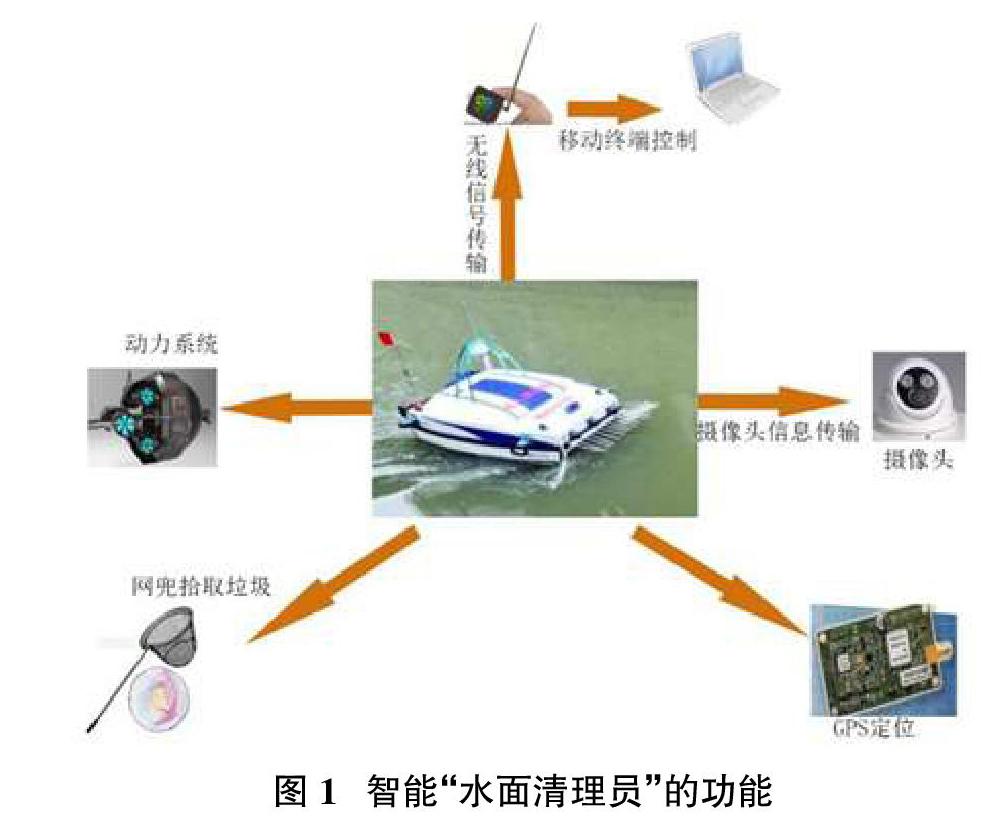
3 智能“水面清理员”的总体设计
智能“水面清理员”的运动通过左右两个对称的推进器实现,并可以通过两个推进器的不同转速来实现对“水面清理员”方向的控制。再用GPS实现清理船更准确的定位。通过船上的风力和光电发生器,风电等清洁能源可以转为电能供清理船航行。使用前可选择可控或自动两个模式。遥控时:“水面清理员”通过电子设备作为遥控终端进行操作,遥控终端通过WiFi跟水面清理船通信,实现清理船的前进,转弯,后退等操作;自动巡航模式下:清理船按照规划航迹自动航行,此外,智能“水面清理员”通过摄像头模块实时采集水面信息传回到地面站终端,以便实时观察水域状况,自动进行垃圾处理[2]。
关键功能指标:
(1)能监测水域污染度以及自主化清理;
(2)能无线数据传输,信息传回地面站;
(3)具有地面站设置遥控和自动巡航两种模式;
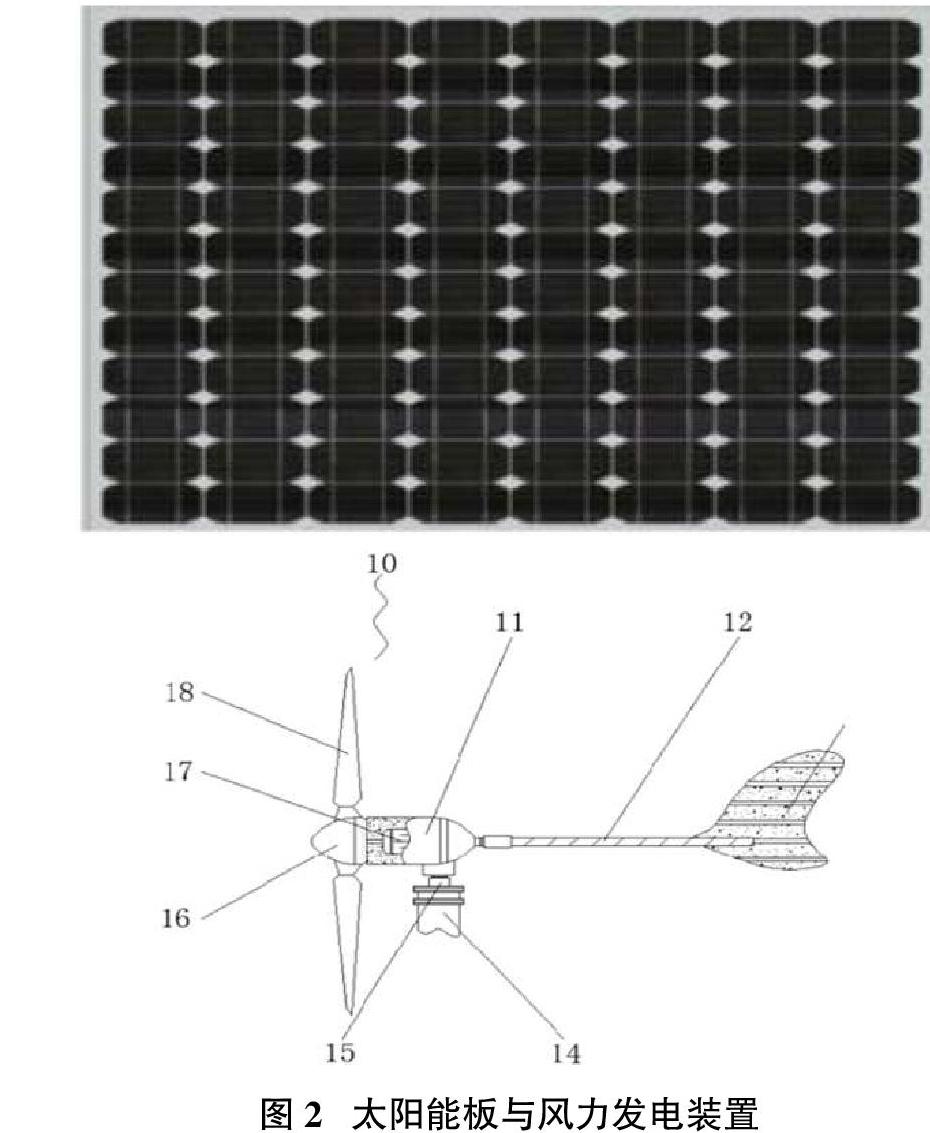
(4)能太阳能、风能充电;
(5)具有巡航记录。
4 软硬件设计
智能水面清理船控制系统主要完成了系统的软、硬件设计。首先对系统总体方案进行分析,接着完成了系统中关键模块选型,包括移动电源、GPS 模块、 摄像头、推进器、舵机等。系统中的具体硬件电路设计包括中心控制器、系统电源电路、串口通信电路、USB 接口电路、信号采集电路等【3】;系统软件设计主要包括平台搭建、驱动程序设计、数据采集、 无线传输以及电机控制等组成。对系统中的 ADC、PWM 设备驱动程序进行了设计,然后实现了控制系统的数据采集程序设计,包括对 GPS 信号采集,电池电量 AD 信号采集、陀螺仪信号采集,同时完成了视频与数据的无线传输程序设计。对图像使用均值漂移( Meanshift) 滤波平滑算法,尽可能减小波纹的干扰; 使用灰度模型与最大类间方差( OTSU) 法分割水面目标【4】,抑制光照不均。航行过程中,运用清洁能源如风力、光等循环利用,延长清理船航行时间,并保护了水质。
5 结束语
本项目基于水面垃圾清理船只,设计智能“水面清理员”。
通过多对一的终端模式实现地面站对水面清理船做出操作指示,并通过WiFi无线通信,提高了数据的传输效率及可靠性,采用均值漂移( Meanshift) 滤波平滑算法、灰度模型与最大类间方差( OTSU) 法等,高效地解決了水面漂浮物识别和分类,利用水面清理船携带的摄像机采集环境数据,实时传回图像,由地面站终端处理信息并反馈结果。应用高精度导航系统自动巡航,并记录航行路线,对垃圾重灾区反复清理。基于全局路径优化和反馈地形匹配的路径追踪算法,实现了实时的操作、规避障碍。
参考文献:
[1] 蔡孟凯,黄淑新,贺诗,等.城市小型湖泊水面智能清洁装置设计[J].机电工程技术,2018(2):49-53.
[2] 孙强,王莎莎,荆世翔,等.基于光伏发电技术的水上清理机器人动力系统设计[J].科技与创新,2018(14):122-123.
[3] 周世鹏. 基于ARM的水面机器人控制系统研究[D].杭州电子科技大学,2018.
[4] 汤伟,刘思洋,高涵,陶倩.基于视觉的水面垃圾清理机器人目标检测算法[J].科学技术与工程,2019,19(03):136-141.
[5] 丁治洁.智能保洁水面机器人的研制[J].科技创新与应用,2019(07):31-32.
【通联编辑:梁书】
