基于改进模糊PI控制器的PMSM矢量控制系统仿真
2019-07-11胡堂清张旭秀
胡堂清,张旭秀
(大连交通大学 电气信息工程学院,大连116028)
近年来,永磁同步电机在工业领域得到了广泛应用,小到微特驱动系统,大到牵引传动系统、工业风机水泵等[1]。永磁同步电机是一个具有非线性、多变量、参数时变等特点的复杂对象[2],在控制系统要求条件比较高时,纯粹的采用传统PI 控制,控制效果往往不理想,容易存在超调量大、系统响应速度慢、转矩脉动过大等问题,使用模糊PI 控制的系统能有效地改善上述问题,但由于模糊控制规则的不足,使得普通模糊PI 控制系统仍存在超调量大、转矩脉动大的问题。
本文提出了一种改进模糊控制规则,可以输出更为合理的调整量ΔKp、ΔKi对PI 控制器的参数进行调节,把改进型模糊控制PI 控制器作为电流环控制器应用到矢量调速系统中,可以实现比普通模糊PI 控制系统和传统PI 控制更好的控制效果。通过仿真可以看出,应用改进模糊PI 控制器的系统在动、静态特性上都要优于采用传统的PI 控制器和普通模糊PI 控制器的系统。
1 永磁同步电机数学模型
本文以表贴式永磁同步电机为例,分析其数学模型。为了便于分析以及建模,做出以下假设:①电动机的三项绕组是完全对称,并且气隙均匀;②忽略定子和转自铁心饱和影响;③不考虑电机的磁滞损耗、涡流损耗,忽略电机磁饱和现象;
其在同步旋转坐标系d-q 下的数学模型为
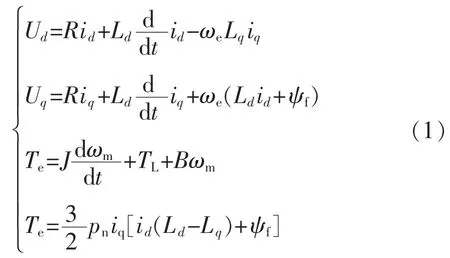
式中:Ud、Uq分别为定子电压d-q 轴的分量;id、iq为定子电流d-q 轴分量;R 为定子电阻;ψf为永磁体磁链;Ld、Lq为直轴、交轴电感;ωe是电角速度;ωm为电机的机械角速度;B 为粘滞摩擦系数;J 为转动惯量;TL为转矩负载;p 为极对数[3]。
2 永磁同步电机调速原理
本文中永磁同步电机调速系统采用的是矢量控制方法,其原理是参考直流电机电枢电流和励磁电流相互垂直、无耦合可以独立控制的思路,从三项静止到两项旋转坐标系经过一系列的坐标变换,实现了转矩和磁场的解耦[4]。这样可以使得永磁同步三项使得交流电机也具有相似于直流电机的特性,是目前采用最多的控制策略。
永磁同步电机矢量控制的本质是通过对定子电流进行控制实现对转矩控制[5]。目前,主要应用到的控制方法有最大转矩/电流控制、恒磁链控制、id=0控制、恒磁链控制、cosφ=1 控制等[6]。在id=0 控制策略中,两项旋转坐标系下的直轴分量为0,只有可以控制输出转矩的交轴分量,电机所有的电流都用来产生输出转矩,使得电流控制效率高[7],所以本文采用id=0 的矢量控制方法。控制系统框图如图1所示。
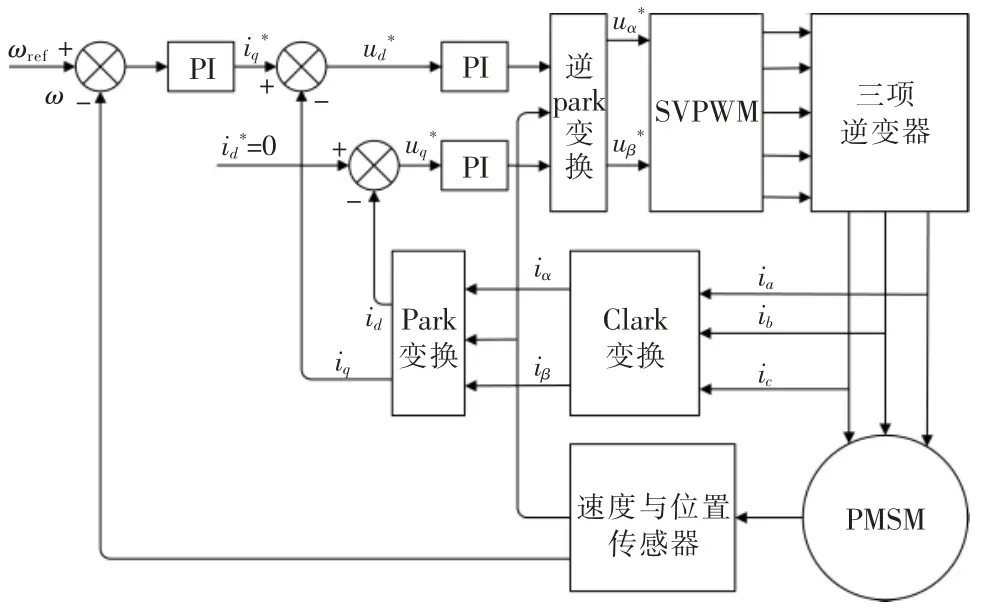
图1 PMSM 矢量控制系统框图Fig.1 Structure block diagram of PMSM vector control system
3 永磁同步电机调速系统仿真
3.1 模糊控制器设计
模糊PI 控制是在传统PI 控制上的改进,通过不断检测系统当前的状态,计算被控制量的差值e和差值变化率ec,并根据改进模糊规则来进行模糊逻辑推理,在进行去模糊化,把模糊量转化为精确量对PI 控制器的参数来进行实时的调整,从而使控制系统具有优于传统PI 控制系统的动、静态特性[8]。
在改进模糊控制系统中,模糊控制器是其核心,它由4 个部分组成模糊化、知识库、改进模糊规则和去模糊化。模糊PI 控制器的原理结构如图2所示。
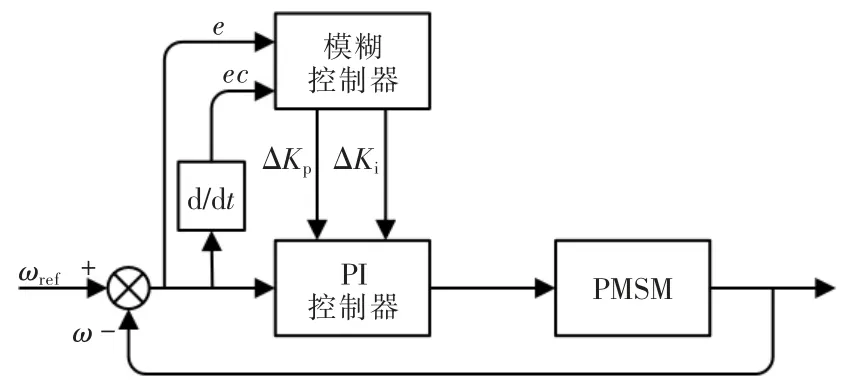
图2 模糊控制器原理结构Fig.2 Principle and structure of fuzzy PI controller
模糊控制器的输入必须通过模糊化才能用于控制输出的求解,因此它实际上是模糊控制器的输入接口。它的主要作用是将真实的确定量输入转换为一个模糊矢量。对于本文的模糊输入变量e、ec,其模糊子集为{NB、NM、NS、ZO、PS、PM、PB}。
经过采样得到的e、ec 经过量化因子处理,映射到其对应模糊论域上的某个实数值,这个实数值可能同时与论域上的几个模糊子集都有关系,求出这个实数值隶属于各个相关模糊子集的隶属度,找出与最大隶属度对应的模糊集合,该模糊集合就代表输入的模糊化结果。
本文的模糊控制器输入输出均为三角形隶属度函数。

式中:a、c 确定三角形的“脚”,b 确定三角形的“峰”。
规则库中存放着模糊规则,这些控制规则根据人类控制专家的经验总结得出。模糊规则基本结构为If A and B then C and D。其中A、B、C、D 为对应论语中的模糊子集。本文主要是在普通模糊规则中模糊子集的对应关系作出改进调整。
已有普通模糊PI 调速系统中,e、ec 为NM(负中)说明系统当前转速与给定值有差值但并不大,ΔKp为PB(正大)、ΔKi为NB(负大),这样调节可以使系统增加响应速度快速消除偏差,但是过大的比例系数会使得系统的超调量增加,产生震荡并且系统的稳定性下降。当输入e、ec 为PM(正中)时系统的转速给定值大于转速的实际值,模糊规则输出ΔKi为PB(正大)、ΔKp为NM(负中),过大的积分系数可以使超调减弱,减小震荡,但是同时也延长了系统消除静差的时间。这样的模糊控制规则存在缺陷。
为了解决上述问题,实现保证响应速度的同时并减小超调、震荡、消除静差,当偏差以及偏差的变化率不大时,输出较小的控制量,对比例系数和积分系数微调。因此,本文给出了一种改进模糊控制规则,输出可以使系统控制性能提升的调整量ΔKp、ΔKi,避免出现输入量小输出的控制量过大的情况,具体的调整规则如下。
(1)当e 变化时,ΔKp、ΔKi调整规则为
在e 较大的情况下,应取较小的ΔKi、较大的ΔKp,这样使得系统避免出现超调量过大,并且加快系统的响应速度;
当e 为中等大时,应当去较小的ΔKi、适中的ΔKp,这样会使系统在减小超调量的同时还能保证响应速度不会下降。
当e 较小时,取较大ΔKp的和ΔKi来保证系统的稳态误差尽可能的小;
(2)当ec 变化时,PI 参数ΔKp、ΔKi调整规则为
当ec 较大时,取适中的ΔKp和较小的ΔKi,使系统在保证响应速度基础上,避免出现超调过大的现象。
当ec 为中等大的情况下,在原有值的基础上加大ΔKp、ΔKi,使系统的响应速度、稳态特性能得到保证;
当ec 较小时,取较大的ΔKp和ΔKi用来提高系统的响应速度。
根据上述的调整规则,制定控制规则如表1所示。

表1 Kp 的控制规则表Tab.1 Control rule of Kp
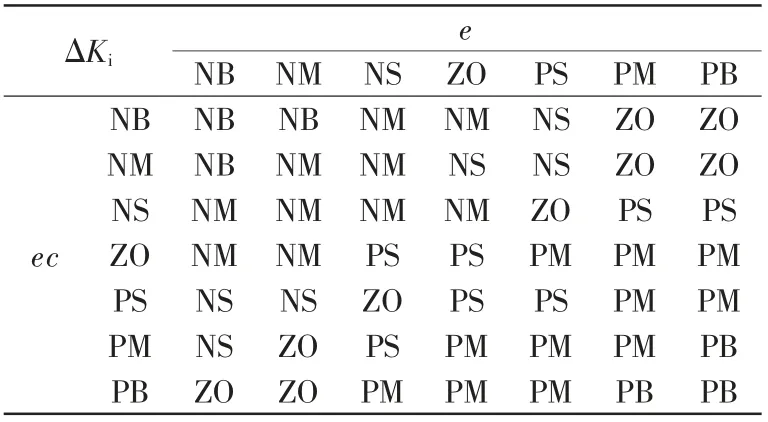
表2 Ki 的控制规则表Tab.2 Control rule of Ki
模糊控制器的输出不是确定的数值,而是一个模糊集合,但是PI 控制器需要精确的调整量,这就要进行去模糊化,去模糊化的方法有很多种,本文使用的是面积重心法,重心法具有更平滑的输出推理控制。即使对应于输入信号的微小变化,输出也会发生变化。
3.2 仿真分析
在Simulink 中搭建了永磁同步电机矢量控制系统仿真模型,转速环使用模糊PI 控制器,在Simulink 中使用Fuzzy Logic Controller 模块建立模糊控制器,仿真模型如图3、图4所示。
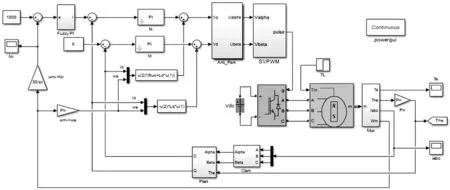
图3 基于改进模糊PI 器矢量控制系统仿真模型Fig.3 Simulation model of vector control system based on improved fuzzy PI

图4 模糊PI 控制器的仿真结构图Fig.4 Simulation structure of the fuzzy PI controller
仿真系统参数:定子电阻Rs=1.958 Ω,转动惯量J=3×10-3kg·m2,极对数pn=4,定子电感Ld=La=8.5 mH,磁链ψf=0.174 Wb;仿真条件设置:参考转速Nref=1000 r/min,在初始时刻负载转矩TL=0 N·m,在0.2 s 是负载转矩为10 N·m。模型的仿真波形如图5~图7所示。
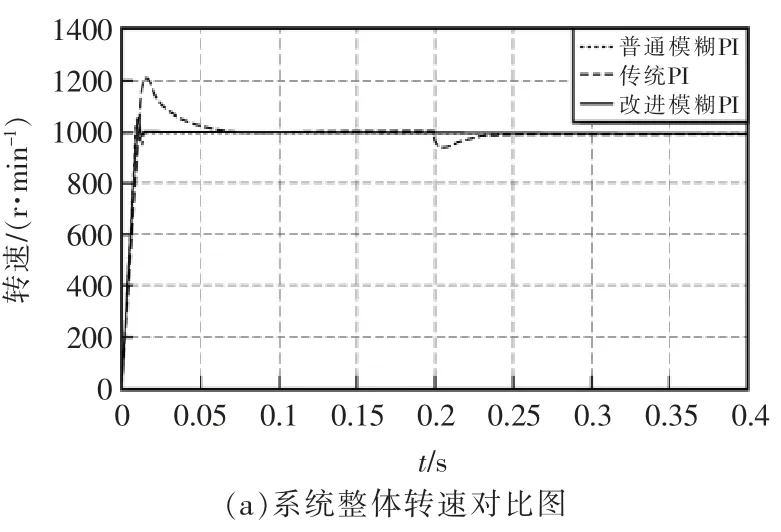

图5 转速仿真比较图Fig.5 Speed simulation comparison diagram
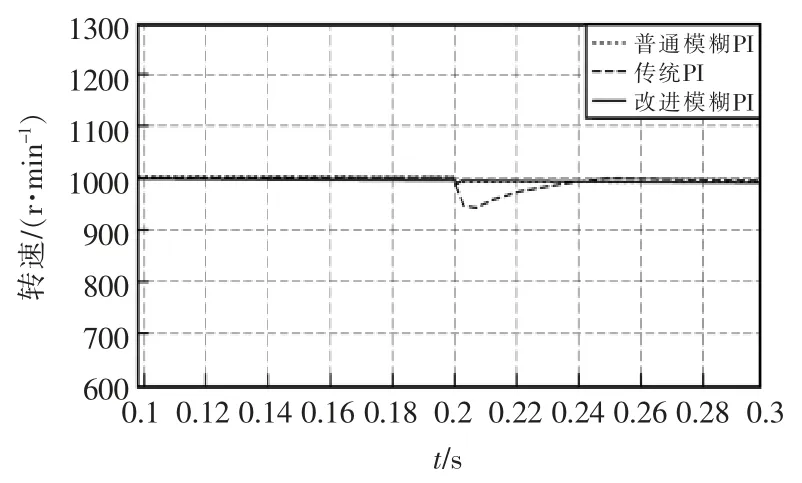
图6 突加负载时系统的转速相应曲线Fig.6 Relative speed curve of the system under sudden load
从仿真结果可以看出传统PI 控制转速的超调量大,响应速度慢,普通的模糊PI 控制系统启动时间短,超调量减少,但是系统会出现震荡,使用改进模糊PI 的系统相较于普通模糊PI 控制系统响应速度加快,并且有更小的超调量,震荡幅度减小。在0.2 s 加负载后,普通模糊PI 控制可以使系统转速快速恢复到给定值,明显优于传统PI 控制,改进型模糊PI 在普通模糊PI 基础上有更好的恢复性能。应用改进型模糊PI控制器的PMSM矢量控制系统抗干扰能力更强。从图九的仿真图看出改进型模糊PI 控制转矩波动幅度小,当系统突加负载也有转矩脉动小且能够迅速到达稳定,无明显的振动。

图7 转矩波形图Fig.7 Torque waveform
4 结语
针对普通模糊PI 控制系统中存在超调量大,震荡幅度大的问题,本文给出了一种改进模糊控制规则应用到模糊PI 控制器中,使模糊控制器输出合理的、对PI 控制器参数进行调整。从仿真结果看出,改进模糊PI 控制系统有较快的响应速度,震荡幅度减小,增加了系统的稳定性,增强了系统的抗干扰能力,达到了很好的控制效果,证明了改进控制规则达到了对模糊PI 控制器的优化。
本文仿真是在理想状况下进行,要实现PMSM矢量控制系统还需要考虑更多因素,值得下一步的研究。
