双光学灵敏杠杆法内径尺寸测量原理的研究
2019-07-10刘林青李东升马建东秦昀亮
刘林青 李东升 马建东 秦昀亮
摘要:针对高效便捷精确测量内径尺寸的问题,该文提出双光杠杆法测量内径尺寸原理,采用两块反射镜形成双光学灵敏杠杆的方法,通过CCD相机采集移动的衍射光斑图像,实现将测头的移动转换为CCD相机上光斑的移动,从而测得内径尺寸。结合反射定律,通过解析几何的办法建立双光学灵敏杠杆法测量内径尺寸的数学模型,并计算两反射镜小角度旋转的21×21种组合情况下内径尺寸的计算结果。根据所建立模型计算设计测头A、测头B分辨力为0.1μm,可较好地满足微米级的测量需求。该原理性研究为双光杆法内径尺寸测量装置的研制提供理论基础。关键词:双光学灵敏杠杆;内径尺寸检测;小孔衍射;亚像素法
中图分类号:TH-3;TH7
文献标志码:A
文章编号:1674–5124(2019)02–0016–06
0 引言
内孔直径是机械工件的一个很重要的尺寸,孔径尺寸测量的精度会直接影响它与轴的配合精度,以及其他零部件的定位、安装精度。受空间及视觉、触觉等因素的制约,内径尺寸测量一直比外尺寸测量难度大很多[1-2]。目前的测量方法在静态离线测量中较为成熟,但是在精密机械加工快速发展的今天,快速在线测量已成为急需解决的问题[3-4]。例如,轴承内径尺寸的测量。目前的内径测量方式根据测量手段不同,可分为接触式测量方法以及非接触式测量方法两种。接触式测量法精度相对较高,应用场合较多。接触式测量方法常见的有塞规法、内径表、内径尺、三坐标测量机、气动量仪等测量方法。传统的方法已经不能满足精密测量技术发展的需要,它们或对操作人员的素质要求较高,或操作复杂,效率低下[5-6]。三坐标机测量具有较高的测量精度及良好的通用性,然而,三坐标机测量需要采集工件表面点的坐标信息,这严重影响了测量效率并且价格昂贵。气动量仪测量属于比较测量,对于不同的测量尺寸,需要制造相应的测量头与校准规,通用性不强。
光学灵敏杠杆具有放大的作用,通常用作瞄准部件,只有配合位移装置才能解决内径尺寸测量,为解决这一问题,本文提出了双光学灵敏杠杆的测量方法,并开展理论研究及原理实验。
1 双光学灵敏杠杆内径尺寸测量原理
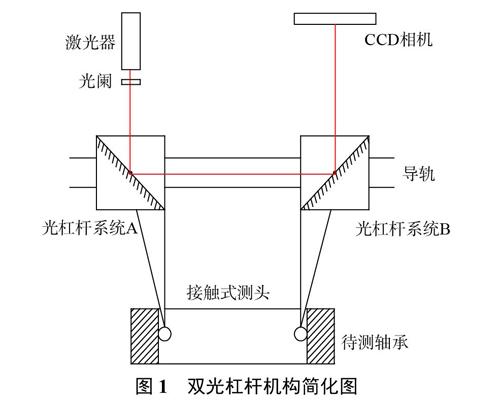
双光杆法内径尺寸测量结构整体示意图如图1所示,主要由激光器、光阑、两组由反射镜构成的光杠杆系统、导轨、CCD相机等组成。首先,光杠杆系统A与光杠杆系统B安装在同一水平导轨上,每个光杠杆系统与一个接触式测头相连,接触式测头的移动可以带动光杠杆系统中的反射镜的转动,初始位置反射镜与水平面的夹角为45°,激光器发出的光经过光阑产生衍射,产生衍射后的入射光45°入射,经过两次反射,成像在CCD上。由于内径尺寸误差的存在,使得接触式测头产生微小位移,反射镜转动,从而激光的光线产生变化,CCD上光斑位置也会发生变化,最后,CCD相机采集衍射光斑图像,由计算机进行图像处理并完成衍射光斑中心坐标计算以及光斑移动距离计算[7-8]。将待测轴承沿水平方向移动一个距离,激光入射后再次发生偏转,CCD上的光斑位置再次移动一个距离,根据光斑两次移动的距离、轴承水平移动的距离以及系统的各项固定尺寸参数,便可得到光杠杆系统A、光杠杆系统B所对应的测头各自移动的距离,进而可求得内径尺寸的实际值。
2 双光学灵敏杠杆测量内径尺寸数学模型
设A、B为两反射镜,激光从反射镜A入射,反射镜B反射,并由反射镜B上方的水平放置的CCD感应,其轴心位置分别为O1、O2,反射镜A、B的初始位置分别与水平方向呈135°以及45°,反射镜A、B可分别绕轴心O1、O2转动,其原理图如图2所示。S线为一条基准线,初始位置反射镜A、B与基准线S的交点分别为Q1、Q2,且Q1Q2=d,d为被测内径尺寸的理论值。基准线S距O1、O2所在水平面的垂直距离为b,CCD距O1O2所在水平面的垂直距离为H。
?L1、?L2分别为A镜顺时针、逆时针转动αS、αN角反映在基准线S上的微小位移;?L3、?L4分别为B镜顺时针、逆时针转动βS、βN角反映在基准线S上的微小位移。
实际生产应用中,?L1、?L2、?L3、?L4所代表的值为,内径尺寸生产过程中产生的误差值。基于该测量方法,实际所测得的内径尺寸表示为D,则D的值有如下情况:
反射镜A、B反映在基准线S上的微小位移与各自转过的微小角度之间的函数关系式为:
初始反射镜A、B与水平方向所夹锐角均为45°,此时CCD上所示光点位置为P1,由于反射镜A、B顺时针、逆时针旋转有多种组合,所以由CCD接收到光点的位置总共有9个区,分别为P1?P9。其数学模型如式(9)~式(17):
式中:αS——反射镜A顺时针旋转α角;
αN——反射镜A逆时针旋转α角;
βS——反射镜B顺时针旋转β角;
βN——反射镜B逆时针旋转β角。
式(9)中,ASB0代表反射镜A旋转αS角度,反射镜B处于45°理想位置时,CCD上光斑位置距初始位置的距离。式(10)中ASBN代表反射镜A旋转αS角度,反射镜B旋转βN角度时,CCD上光斑位置距初始位置的距离。式(11)~式(17)的表达方式依此类比。
各个光点到初始点P1点的距离可通过CCD测得,再次使双光杠杆系统中的反射镜A、反射镜B分别绕各自轴心按规定的方向旋转某个角度,使得在基准线S上反映为在同一个方向移动相同的已知量?L,反射镜A与反射镜B所对应转过的角度为?α、?β,光点的位置会再次移动,而?α、?β可用?L、α、β来表示,新的光点位置在原来方程的基础上,在未知数角度上增加一个偏角,从而构造出一个新的方程。根據新方程和原方程所构造的方程组解得两个角度未知量,根据角度换算出反射镜A、B在基准线上所产生的位移,即?L1、?L2、?L3、?L4的值,根据上述所示D值表达式,便可得到内径的实际直径大小。
取反射镜A转动角度区间为[–0.13°,0.13°],反射镜B角度转动区间为[–0.13°,0.13°],根据上述所建模型,为了使用Matlab计算方便,将角度换算为弧度,根据上述所建模型得到的衍射光斑在CCD上的移动距离分布图如图3所示。
图中x坐标为反射镜A转过的角度,y坐标为反射镜B转过的角度,z坐标为CCD上光斑移动距离的理论值,反射镜A、反射镜B在初始位置时的坐标为(0,0,0)。
3 模拟测量实验
3.1 测量实验设计
设计双杠杆测量微小位移试验如图4所示,实验系统采用单模光纤耦合输出激光器,激光波长为655nm,双光杆系统中的反射镜采用2片直径为20mm的宽带介质膜反射镜,激光45°角入射时,反射率>99.5%,接收光斑的CCD相机面阵尺寸为17.4mm×13.0mm,面阵像元数为10368×7776,面阵的平均像元间距w约为1.675μm。接触式测头带动光杠杆系统中反射镜转动采用高精度角位移平台代替,角分度盘千分尺手轮每旋转一格,反射镜旋转0.013°。如图所示,反射镜A、反射镜B通过角分度盘连接,安装在导轨A上,且两反射镜中心距离为50mm。激光器和光阑安装在与之垂直导轨B上,其中激光器发出的光点中心,光阑的中心与反射镜A的中心共线,反射镜A和反射镜B中心共线,CCD相机的镜头中心与反射镜B中心共线,相机法兰连接处与反射镜B距离135mm。
测量时,反射镜A、B都在初始位置,反射镜B不动,使得角分度盘A带动反射镜A顺时针旋转一格,即旋转了0.013°顺时针旋转记为正值,逆时针旋转记为负值,CCD相机采集一张图片,反射镜A再次顺时针旋转一格,CCD相机采集一张图片,直至反射镜A逆时针旋转了10格,每旋转一格采集一张图片,A镜回到初始位置,开始逆时针旋转,每次转动一格,同样转动10格。然后反射镜B顺时针旋转1格,反射镜A再次重复上述动作。反射镜B依次顺时针旋转10格、逆时针旋转10格,就可把反射镜A在[–0.13°,0.13°]与反射镜B在[–0.13°,0.13°]范围内光斑移动的情况全部采集到。
将采集到的衍射光斑中心点的像素坐标提取出来,选取目标的点,用其像素坐标值作差,再乘以像素长度,就可以得到光斑在CCD上移动的距离。
3.2亚像素法定位衍射光斑中心坐标
双光杆测量微位移实验实物图如图5所示,采用Matlab对识别后的衍射光斑图像进行低通滤波预处理,再经过灰度化、二值化处理,然后采用LoG算子提取衍射光斑的整像素边缘[9-10],计算低于三阶矩的Zernike矩运算模板[11-13],在包含边缘点的邻域内使用这些模板与识别后单像素衍射光斑图像进行卷积运算,再经过圆形拟合获得3个圆中心的亚像素位置坐标,图6(b)是使用Zernike矩亚像素算法对图6(a)进行处理的结果,取3个圆环中心坐标平均值作为衍射光斑的中心亚像素坐标,原点处图像的中心亚像素坐标为(620.75,517.82)。
将所有采集的图像中心点的坐标提取出来,各个点像素坐标值与原点的像素坐标值之差即为衍射光斑移动的像元个数m,本文CCD相机面阵的平均像元间距w约为1.675μm,则反射镜A、反射镜B转动区间范围内CCD上各光斑实际位移s=wm,用Matlab描点作图所得到的图像如图7所示。
图中x坐标为反射镜A转过的角度,y坐标为反射镜B转过的角度,z坐标为CCD上光斑移动距离的实验值,反射镜A、反射镜B在初始位置时的坐标为(0,0,0)。
3.3 相机转换系数测量实验
由于CCD相机镜头是一个复杂的透镜组合,
对光路必然存在着影响,从而影响衍射光斑在CCD相机靶面上的实际位移大小,为了精确确定镜头对光斑在CCD靶面上移动距离的影响值,设计了实验如图8所示,将激光器固定在气浮移动平台上,初始位置使得激光器发射点与镜头中心点共线,激光发射器距相机镜头法兰连接处135mm,出射激光经过光阑产生的衍射光斑被CCD相机靶面接收。所用二维气浮定位平台为AerotechABL1000型号,其分辨力为50nm,定位准确度为±0.2μm。
使用工控机每次控制激光器平移距离为e=10μm,从原点起分别向左和向右移动10次,每移动一次CCD采集一张图片,重复实验3组,用前文所述方法将每张图片衍射光斑的中心点坐标提取出来,水平方向相邻两坐标之间依次作差,将3组实验所得CCD上移动像素个数求取平均值平均值p≈3.071px。假设相机缩放比例系数为K,则:
3.4 相机分辨力验证实验
双光学灵敏杠杆法测量内径尺寸,其测量分辨力主要取决于其所用CCD相机的分辨力。为了测量所选用相机的分辨力,设计了如图9所示实验。
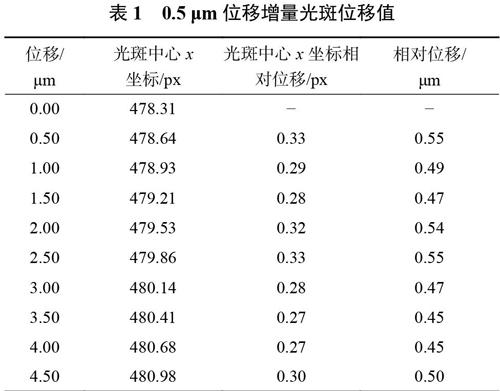
将相机机身与镜头分离,相隔间距满足两者相对移动不互相影响即可。相机机身固定在二维气浮平台上,镜头、光阑、激光器中心共线,固定在隔振实验台上。初始位置激光光点在CCD相机靶面中心。控制二维气浮平台使CCD相机平移距离为0.5μm,依次平移9次,从初始位置开始,每移动一次采集一张图片。对用前文所述方法将每张图片衍射光斑的中心点坐标提取出来,得到表1中的结果。
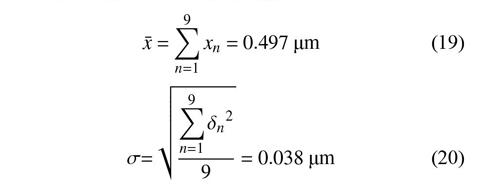
求得根据上述计算结果可得,二维气浮平台移动0.5μm,求得的CCD相机上光斑中心点位移值的均值为0.497μm,方差为0.038μm,可认为该相机在分辨0.5μm的移动量时有较好的分辨力。
3.5 实验结果分析
根据式(9)~式(17),取α=[0,0.13?],β=0可计算出反射鏡A每旋转0.013°,CCD上光斑位移的理论步长值TA=84.0μm。其图像如图10所示。
但实际测量中有相机转换系数K的存在,实际情况下CCD上光斑位移的理论步长值SA为
