硅胶履带式高空爬壁清洁机器人的设计与分析
2019-07-01林仁军张蓥田刚方庆林马凯涛
林仁军 张蓥 田刚 方庆林 马凯涛

摘 要:针对自动化清洗高空玻璃幕墙清洗的需求,本设计提出并设计一种利用涵道电机的硅胶履带式高空爬壁清洁机器人,介绍了其整体机械结构、软件设计,并对机器人的运动进行静力学分析。这种利用涵道电机的硅胶履带式高空爬壁清洁机器人能够在玻璃幕墙上垂直行走,具有控制简单、结构简单、可靠性高的优点。
关键词:爬壁清洁机器人;涵道电机;履带式机器人
中图分类号:TP242.2 文献标识码:A 文章编号:1671-2064(2019)10-0057-02
0 引言
近年来,随着我国经济的高速发展,越来越多的玻璃幕墙被应用于高层建筑中。为了保证玻璃幕墙的美观与能见度,玻璃幕墙需要定期维护与清洁。在这种需求下,由人工使用升降平台或吊索清洁玻璃幕墙的“蜘蛛人”行业应运而生。但是这种行业不仅具有很高的危险性,而且成本高、效率低。目前并没有成熟的机器人取代这种高危职业,因此本文提出并设计一种由机器人主体、缆绳系统、视觉识别及决策系统、伺服控制系统组成的硅胶履带式高空爬壁清洁机器人。
1 机器人主体的结构分析
1.1 多种爬壁机器人的结构分析
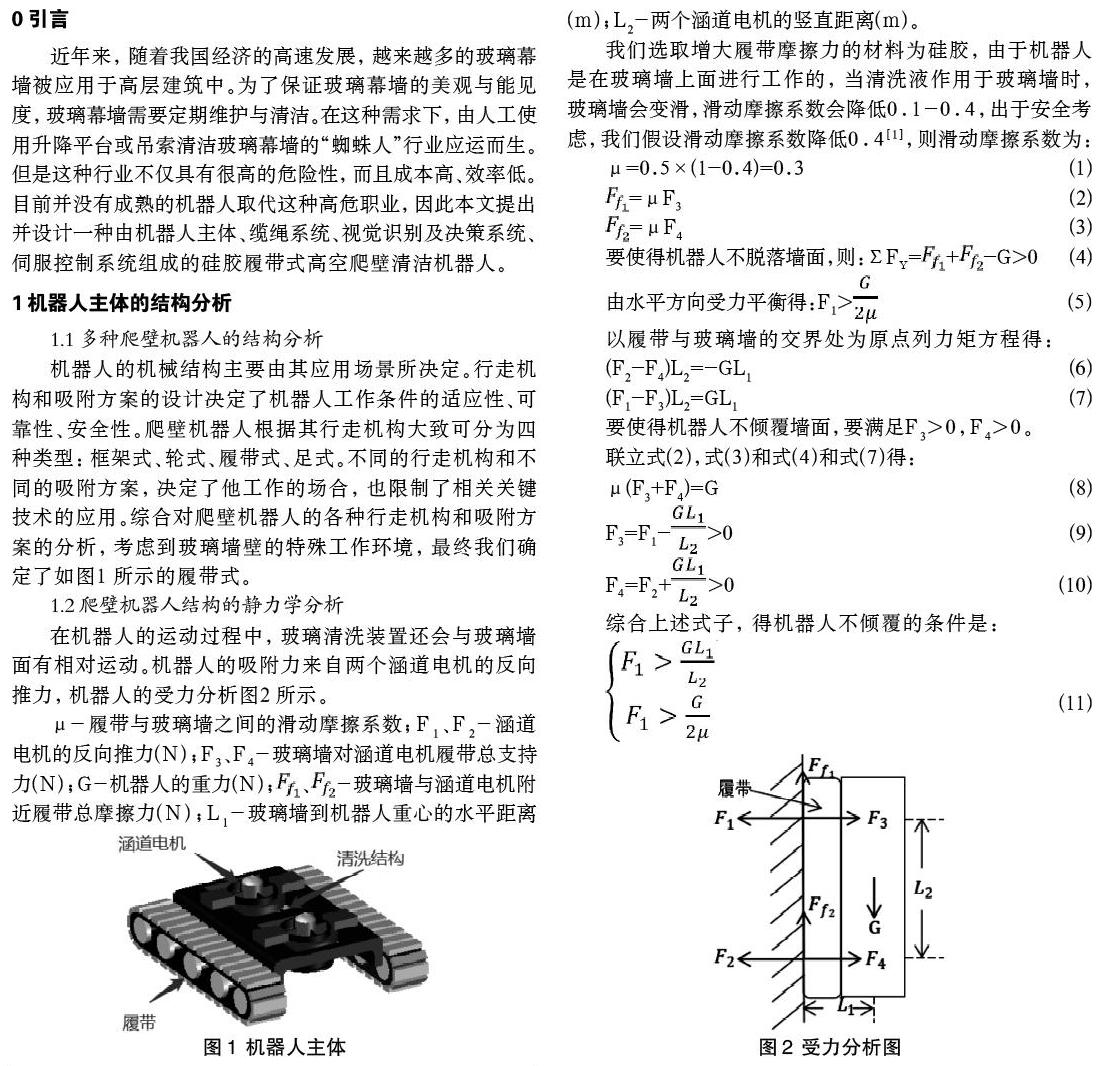
机器人的机械结构主要由其应用场景所决定。行走机构和吸附方案的设计决定了机器人工作条件的适应性、可靠性、安全性。爬壁机器人根据其行走机构大致可分为四种类型:框架式、轮式、履带式、足式。不同的行走机构和不同的吸附方案,决定了他工作的场合,也限制了相关关键技术的应用。综合对爬壁机器人的各种行走机构和吸附方案的分析,考虑到玻璃墙壁的特殊工作环境,最终我们确定了如图1所示的履带式。
1.2 爬壁机器人结构的静力学分析
在机器人的运动过程中,玻璃清洗装置还会与玻璃墙面有相对运动。机器人的吸附力来自两个涵道电机的反向推力,机器人的受力分析图2所示。
由不倾覆的条件式可知:机器人在静止-不清洗情况下,机器人质量固定的条件下,的比例值越小越不容易倾覆和脱落,μ的值越大,越不容易倾覆和脱落。
2 缆绳系统的结构设计及工作原理
缆绳系统由钢丝、压力传感器、伺服控制电路、电源、电机、支架组成,缆绳系统三维模型见图3所示。伺服控制电路利用压力传感器实时控制线缆的绷紧程度,保证机器人在幕墙移动时不会出现被缆绳缠绕的情况。
3 机器人视觉识别
3.1 软件及硬件平台
机器人视觉识别系统采用树莓派+OEPNCV视觉库。
3.2 边框识别原理分析
当机器人获得一帧图像时,机器人会先对图像进行滤波,再对其进行二值化。图像预处理完成后,就运用OEPNCV边缘检测算法对处理后的图像上进行边缘检测,再通过HoughLinesP函数算法求取图像上的线段。由于边框都是矩形的,故线段所在区域即为边框所在区域。在获得边框区域内的线段后,对所有线段进行处理与筛选,最后每一条边框只需要保留一条线段即可[2]。窗户原图如图4所示。框内线段即为最终保留的线段,如图5所示。
4 機器人伺服控制系统设计
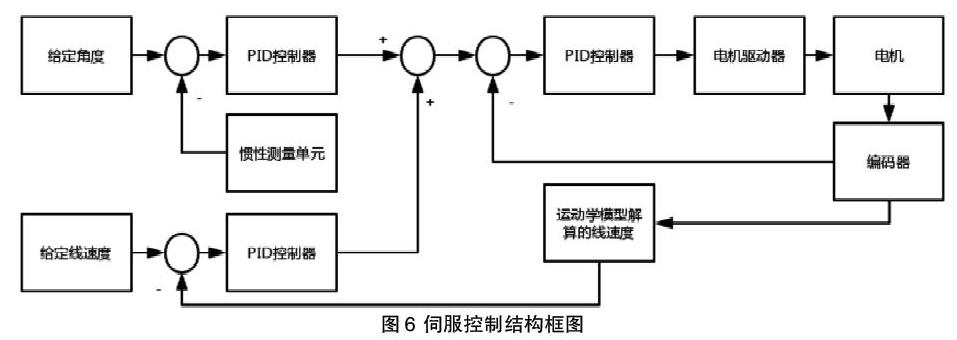
机器人伺服控制主要完成机器人的直线及转弯运动。伺服控制系统使用电机编码器、陀螺仪作为反馈,利用PID控制算法完成机器人速度环及角度环的调节,其中角度环为速度环的外环。控制结构框图如图6所示。
5 原理机实验
原理机在硬件上主要由机器人主体和缆绳系统组成,实物图如图7所示。结合本文得静力学分析,测量原理机得相关参数为:
将原理机得相关参数代入不等式,得:原理机不会滑落,原理机可以稳定爬行。原理机实际爬行见图8所示。
6 结语
本文主要论述了硅胶履带式高空爬壁清洁机器人的系统组成及机械结构分析。通过从机械结构的静力学分析对涵道电机的参数进行科学地选择,并利用视觉检测、伺服控制、缆绳系统实现了机器人在玻璃幕墙自主完成清洁任务。通过实际样机的搭建与测试,证明了硅胶履带式高空爬壁清洁机器人应用于玻璃幕墙清洁的可行性和控制简单、结构简单、可靠性高的优点。
参考文献
[1] 田静眉.真空吸附式壁面清洗机器人结构设计与研究[D].西南交通大学,2013.
[2] 陈振学.基于特征显著性的目标识别方法及其应用研究[D].华中科技大学,2007.
