基于平流层飞艇的星地中继通信系统设计
2019-06-27王荆宁郎磊杨乾远薛松海何占林
王荆宁 郎磊 杨乾远 薛松海 何占林


【摘 要】针对高轨卫星对地激光链路受大气层影响较大,难以全天候工作的现状,设计了一种利用平流层飞艇平台对激光链路进行中继的通信系统,将激光终端升空到平流层降低大气层影响,采用高速微波实现飞艇平台到地面的信息中继,可以实现5 Gbit·s-1以上的可靠信息传输。对激光载荷安装、微波链路预算以及天线对准等进行了分析,总结了随机运动特性平台高精度指向和快速捕获、大幅度低频扰动特性下高精度稳定、大容量微波高速自适应均衡等关键技术,可以满足高速中继的需求。
【关键词】星地中继通信;平流层平台;空间激光通信;微波通信;雨衰分析
中图分类号:TN929.5
文献标志码:A 文章编号:1006-1010(2019)05-0060-05
1 引言
空间激光通信由于传输容量大,是未来星地通信和星间通信的重要手段,通过星间、星地激光通信链路与地面光纤骨干网连接,形成天地一体化的激光宽带信息网络,可以实现5 Gbit·s-1以上的高速信息传输。
高轨卫星的激光直接落地受到大气层中雨、雾、云层和大气湍流等的影响,星地激光链路无法全天侯工作。如果地面终端升空到20 km的平流层,就不存在雨、雾和云层的影响,大气湍流和大气衰减的影響将减少超过90%。因此在平流层对星地激光进行微波中继是星地激光通信实用化很好的途径,是天空地一体化的重要组成部分。
美国霍普金斯大学开展的SPARCL(Space Relay Communications Link,空间中继通信链路)计划提出了星地中继的思路,如图1所示,计划采用高空气球通过空间激光通信系统中继接收LEO、GEO下传的高速数据流,然后通过系留光纤下传到地面站,进而有效避开云层、大气衰减、大气吸收、大气湍流等负面影响,形成卫星-临近空间-地面全光下行传输链路,但该计划未见实际实施的报道。
2006年法国LOLA试验开展了40 000 km下50 Gbit·s-1通信速率的星-空激光通信试验。国内哈尔滨工业大学实现了1 650 km下的504 Mbit·s-1的星-地激光通信试验,中科院上海光机所搭载于“墨子号”的载荷实现了1 600 km下的5 Gbit·s-1的星-地激光通信试验,仅有长春理工大学2013年开展了144 km下2.5Gbit·s-1的空-空激光通信试验,尚没有开展过星-空的激光通信试验以及高轨对地的激光通信试验[1-4]。
2 系统设计
2.1 系统组成
浮空平台节点包含激光通信载荷、微波通信载荷、平流层飞艇等[5-6]。
激光通信载荷主要实现对天基骨干节点激光通信载荷初始指向,链路捕获跟踪,建立激光通信链路,进行数据双向高速传输。激光通信载荷主要由光机单元、通信处理单元、管控单元、组合惯导单元,微波载荷主要包括基带处理单元、射频单元、天线伺服单元、组合惯导单元。
由于激光载荷和微波载荷对位置和姿态的要求很高,而两个载荷分别安装在平台的顶部和底部,因此需要单独安装组合惯导单元测量位置和稳定姿态。
2.2 传输体制
用于空间激光通信的通信体制主要有相干通信体制和IM/DD(Intensity Modulation/Direct Detection,强度调制/直接探测)的通信体制。星地中继通信系统需要实现40 000 km下5 Gbit·s-1~20 Gbit·s-1的高速信息传输,相干体制接收灵敏度比IM/DD体制接收灵敏度高约10 dB~20 dB,并且易于实现PSK(Phase Shift Keying,移相键控)、QAM(Quadrature Amplitude Modulation,正交振幅调制)等高阶调制,实现大容量的通信,因此本系统选用相干通信体制。
微波通信是点对点传输,传输速率高,一般采用定向天线,因此采用单载波的FDD体制。按照5 Gbit·s-1的传输速率计算,可以采用16QAM调制方式,编码方式采用LDPC编码(码率8/9),成型方式选择平方根升余弦,滚降系数选定为0.25,带宽为1.83 GHz。
2.3 波段与频率选择
激光通信常用的信号或信标波长主要包括800 nm、1 064 nm及1 550 nm三个波段。其中1 550 nm在太空中背景光少、探测的背景噪声低,且受益于光纤通信的发展,国内1 550 nm波段器件较为成熟,因此本系统选用1 550 nm波段作为激光链路的通信波段,800 nm波段作为激光链路的信标光波段。
微波通信由于单向需要接近2 GHz的带宽,且需要不少于4 GHz的双工间隔,在低频段难以找到合适的频段,可以使用的频段包括Q频段和E频段。由于E频段频率较高,雨衰较大,且国内器件不成熟,因此本系统采用Q频段。结合我国的频率划分情况,上行采用36 GHz—42.5 GHz频段,下行采用42.5 GHz—46 GHz频段,该频段大气和降雨的损耗不存在峰值。
2.4 平台选择
可用于平流层的平台包括平流层飞艇、平流层气球和太阳能无人机三种[5]。星地中继需要的载重较大,且需要平台能够稳定在固定区域工作。太阳能无人机载重较小并且对气动外形要求较高,平流层气球载重较小且没有动力,运动范围较大,均无法满足系统要求。平流层飞艇载重可达数百公斤,自身动力可以保证在相对固定的区域工作,是星地中继的最佳平台。
考虑平台的伺服等安装要求,平台俯仰角变化数据极限值应不超过±15°,三轴角速度极限值不超过10°/s,三轴线加速度极限值不超过5 m/s2,载重能力应不小于200 kg,供电能力应不小于1 kW。
2.5 天线口径设计
通信天线口径需要考虑飞艇平台的载重能力、对准的可靠性和通信能力的折中,光学天线的口径设计为0.3 m,平台微波天线口径设计为0.3 m,地面微波天线的口径设计为1.8 m。按照该口径进行计算,激光通信载荷重量不超過85 kg,微波通信载荷重量不超过65 kg。
2.6 激光载荷安装设计
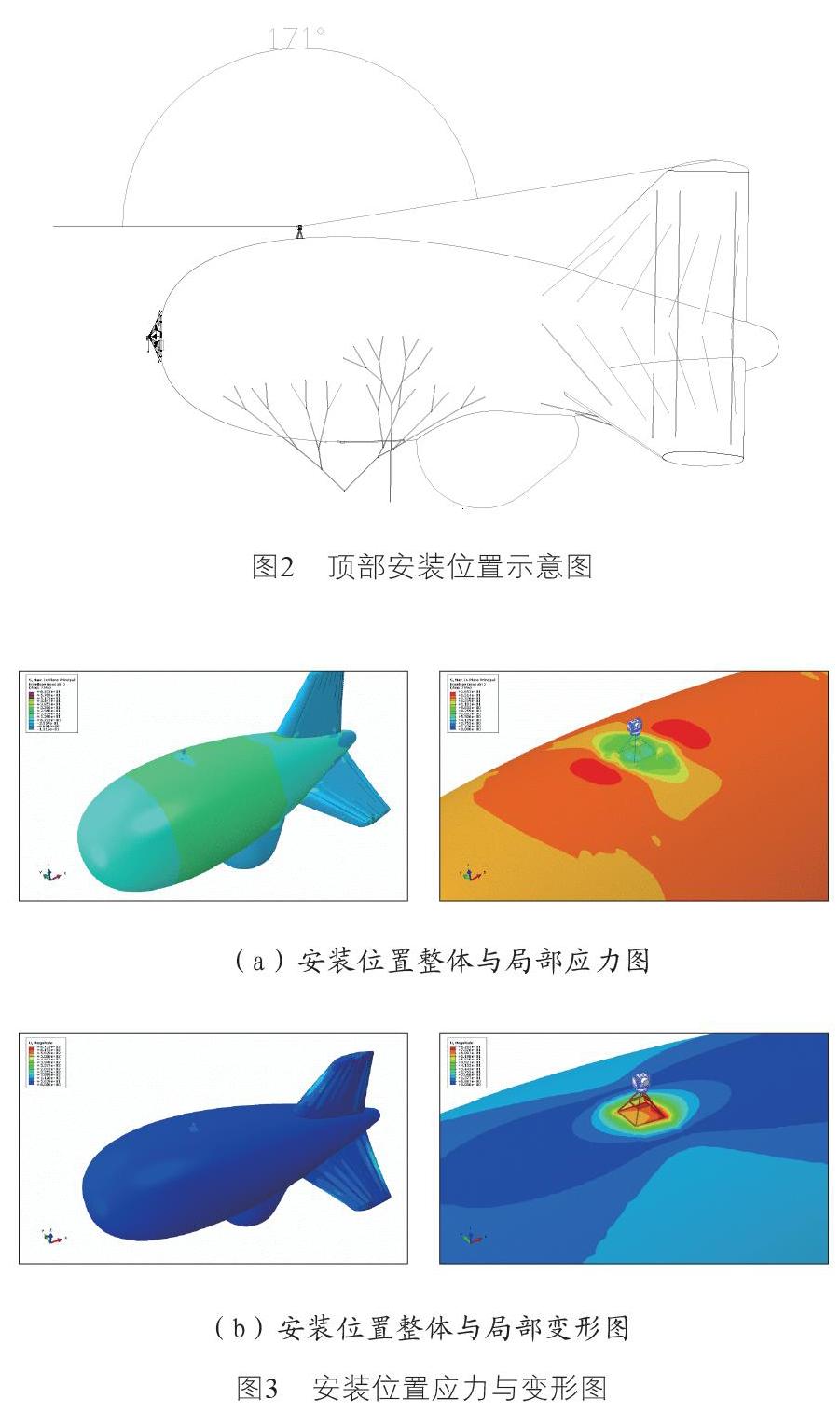
激光载荷需要安装在平台的上方,遮挡严重的是横向位置的尾翼,靠后的位置尾翼遮挡较大。选择居中的位置,在气球平台俯仰角为0°的情况下,所能达到的视场角度为171°,可以满足对高轨星的视场角要求。
顶部安装位置示意图如图2所示。
根据安装位置计算囊体结构强度及变形情况,设定风速为20 m/s,计算结果显示囊体最大张力为33 N/cm,最大变形为83 mm,可以安全稳定安装。安装位置应力与变形图如图3所示。
2.7 激光与微波对准分析
对于星-空激光链路,由于高轨星稳定性较好,其光轴初始指向精度优于飞艇,所以链路捕获模式设计为飞艇激光载荷凝视指向、高轨星激光载荷信标扫描模式。首先采用高精度GPS/INS测量飞艇位置与姿态,飞艇激光载荷与高轨星激光载荷相互初始指向,飞艇激光载荷凝视,飞艇激光载荷CCD接收视场覆盖其指向不确定区域,高轨星激光载荷发射信标光在其初始指向不确定区域内进行连续扫描。当高轨星激光载荷信标光进入飞艇激光载荷粗跟踪视场后,飞艇激光载荷转入粗跟踪将高轨星光斑跟踪到粗跟踪视场中心。
对于空-地微波链路,由于飞艇天线波束宽度大于地面站天线波束宽度,因此采用地面站天线跟踪飞艇的方式进行天线对准。飞艇天线可以根据通信双方的经纬度定位信息以及惯性导航设备提供的测向信息计算通信位置角度,控制飞艇天线指向地面站,并且隔离飞艇的摇摆,并提供稳定信标,地面站天线采用单通道单脉冲跟踪体制实现对飞艇的自动跟踪。飞艇天线也采用单脉冲跟踪体制,配备跟踪接收机,当地面站天线指向对准后,用来实际纠正飞艇的位置姿态带来的指向误差。
3 微波链路雨衰分析
由于将激光通信载荷升高到平流层基本可以不考虑大气层的影响,因此微波链路在不同气象条件下的可靠性是整个链路可靠工作的重要保证。
平流层平台飞行高度设计为18 km~24 km,微波载荷通信系统最大通信距离按照50 km计算,则地面站到浮空平台的仰角θ≥21°6′。
根据通信行业标准YD/T 984-1998,地球站实际降雨高度为:
考虑到中国大陆的纬度覆盖北纬4°到北纬53°,因此地球站实际降雨高度最大为4 km。根据浮空平台仰角可知受降雨影响的地面站大浮空平台最大路径长度,其水平投影长度为10.4 km。降雨影响的地面站到平流层平台最大路径长度示意图如图4所示:
下面以频率为45 GHz,合肥地区的雨衰进行计算,根据GB/T 14617.3-2012得到雨区划分,如表1所示:
门限电平按照-57.5 dBm计算,接收电平按照-32.4 dBm计算,根据接收电平及链路雨衰估算得到合肥地区99%、99.5%、99.9%可用度的链路通信余量如表2所示。可以看出,按照50 km计算,可以达到99.5%的可用度[7-8]:
4 关键技术分析
4.1 随机运动特性平台高精度指向和快速捕获技术
平流层飞艇姿态位置变化率快、变化幅度大,平台位姿变换随机性强,无法实现预测,这就给激光通信链路的初始建立带来了非常大的难度。受到平台姿态测量误差、视轴稳定误差、光端机视轴装校误差等因素影响,存在较大的不确定区域(通常大于几个mrad),远远大于通信光束的束散角(十几μrad),若直接用通信光束在不确定区域内进行捕获,可能会需要相当长的捕获时间,甚至导致相当低的捕获概率,因此高精度指向、快速捕获技术是该系统的关键技术[9]。
4.2 大幅度低频扰动特性下的高精度稳定技术
相对于姿态保持较好的卫星平台,飞艇平台的特点为大幅度低频扰动,其姿态变化幅度大,可达到度级,并且扰动频率相对较低[10]。如果不对此低频扰动进行抑制,不仅影响初始的捕获不确定区域,影响捕获性能,且此低频扰动也影响最终的跟踪精度。所以艇载通信系统需要首先实现自身的稳定,它是开展快速捕获和高精度跟踪的前提,这就要求通信系统具备抑制这种大幅扰动的能力。
4.3 大容量微波高速自适应均衡技术
高速解调器需处理的信号总带宽超过2 GHz,宽带信号在通过模拟射频信道的过程中,会产生严重的群时延失真和幅度失真。越来越高的传输带宽造成了严重的时间色散,接收信号中包含了不同衰落和时延的多径分量,引起频率选择性衰落,从而导致严重的码间干扰,降低了传输的性能。同时,残留线性失真和随机干扰也会引起设备性能下降。这些失真将带来符号间的串扰,严重影响解调性能。因此,在系统设计中应采用自适应均衡技术,减小符号间的串扰。
5 结论
本文设计了一种利用平流层飞艇搭载激光载荷和微波载荷进行星地中继传输的系统。经过计算,微波链路在合肥地区可以达到99.5%以上的可靠度,激光载荷的视场角可以达到171°,可以实现星地激光链路的长时间工作,极大提升该链路的可用性。
参考文献:
[1] 中国信息与电子工程科技发展战略研究中心. 中国电子信息工程科技发展研究(综合篇)[M]. 北京: 科技出版社, 2017: 65-89.
[2] 姜会林,安岩,张雅琳,等. 空间激光通信现状、发展趋势及关键技术分析[J]. 飞行器测控学报, 2015,34(3): 207-217.
[3] 曾智龙,刘兴,孙晖,等. 空间激光通信最新进展及发展建议[J]. 光通信技术, 2017,41(6): 1-5.
[4] 孙震强. 一种基于平流层高空平台的5G广覆盖解决方案[J]. 移动通信, 2018,42(9): 28-31.
[5] 丁平,杨健. 临近空间飞行器在空间通信中的应用[J]. 科技信息, 2010(32): 419-420.
[6] 吴俊晨,任文成. 高空平台无线通信系统设计[J]. 无线电通信技术, 2013,39(1): 16-18.
[7] 潘可臻. 临近空间空地信道雨衰模型研究[D]. 重庆: 重庆大学, 2018.
[8] 管明祥,郭庆,顾学迈. HAPS通信覆盖及链路特性分析[J]. 电波科学学报, 2012,27(4): 832-839.
[9] 李小明,张立中,孟立新,等. 机载无线激光通信对准-捕获-跟踪系统及动态飞行试验研究[J]. 兵工学报, 2016,37(6): 1044-1051.
[10] 管明祥,郭庆,顾学迈. 高空平台不稳定性对HAPS通信性能影响建模与分析[J]. 电子学报, 2012,40(10): 1948-1953.
