自动拾取乒乓球机器人的机械结构设计
2019-06-27刘仕文
刘仕文


摘 要:文章详细探讨了自动拾取乒乓球机器人机械结构部分的设计。首先用UG NX 6.0软件构建出自动拾取乒乓球机器人的立体模型,再对其各运动机构进行分析说明,最后用AutoCAD2008软件绘制出相应零部件的工程图和机器人的装配图。
关键词:机器人;乒乓球;机械结构;UG NX 6.0
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2019)09-0001-08
Abstract: In this paper, the design of the mechanical structure of the automatic pickup table tennis robot is discussed in detail. Firstly, the three-dimensional model of the automatic pick-up table tennis robot is constructed by UG NX 6.0. then the motion mechanism of the robot is analyzed and explained. finally, the engineering drawing of the corresponding parts and the assembly drawing of the robot are drawn by AutoCAD2008 software.
Keywords: robot; table tennis; mechanical structure; UG NX 6.0
在乒乓球场上训练或比赛的时候,地面上肯定会有很多出界和无效的乒乓球。目前,主要还是通过人工的方式来捡球和送球,这明显降低了工作的效率和提高了工作人员的劳动强度。虽然已经有很多智能机器人被应用到我们的日常生活中,但是并没有被专门应用于乒乓球场上的机器人。因此,如果能将智能机器人应用于乒乓球场上,实现捡球和送球的自动化,其必将大大提高该工作的效率和降低工作人员的劳动强度。
本自动拾取乒乓球机器人主要应用于乒乓球训练场或比赛场上,其主要功能是自动拾取乒乓球。该自动拾取乒乓球机器人的工作流程如下:当自动拾取乒乓球机器人通过声控装置自动识别并接收到运动员发出的捡球命令后,首先采用图像识别技术自动识别乒乓球的方位,接着对乒乓球的位置分布作一个最优的行程判断,然后再走到乒乓球所在的地方,最后将乒乓球捡起并放进存放腔中;当机器人接收到由运动员发出的送球指令后,再自动把乒乓球送给运动员。
为便于读者更好地理解机械结构的设计思路,本文从一开始就引入总体设计方案,然后对各主要机构进行详细的设计和分析,最后介绍设计的总体效果。
1 总体设计方案
1.1 行走方式
机器人行走机构的分类和特点如表1所示[1]。
由于乒乓球场一般都比较宽敞,且地面比较平整,所以选择轮式行走方式比较合理。而且,轮式机器人的设计和制作过程相对其它类型机器人较为简单,其自动控制系统的设计也相对容易。
1.2 捡球方式
捡球方式有两种可供选择的方案。一种方案是设计一个机械手,直接将乒乓球抓取起来,再将乒乓球放到存放腔中;另一种方案是仿照吸尘器的原理,将乒乓球吸起来,再存放到存放腔中。如果设计一个机械手直接抓取乒乓球,则需要设计的活动关节较多,所设计的机构将较为复杂,而且在自动控制方面也较难处理。由于自动拾取乒乓球机器人作用的对象是乒乓球,其重量较轻、体积较小,因而比较容易吸取。因此,本设计采用第二种方案。这就需要安装一个可以吸气的微型真空泵。微型真空泵的结构如图1所示。
微型真空泵的工作原理是:电机作圆周运动,通过机械装置使真空泵内部的隔膜做往复式运动,以对固定容积的真空泵腔内的空气进行压缩、拉伸而形成真空、负压,从而使真空泵的抽气口处与外界大气压产生压力差。在压力差的作用下,将气体压(吸)入泵腔内,再从排气口排出来,完成一个吸气的过程[2]。
在真空泵吸气的过程中,空气如果能从乒乓球的出口进入,则会减少从乒乓球入口进入的空气,而达不到捡球的作用。为了防止这一情况的出现,现另外设计一个堵气机构。在微型真空泵吸气的过程中,乒乓球的出口关闭。当微型真空泵吸气完成后,乒乓球的出口打开,让乒乓球走出来,进入存放腔中。在本机器人中,设计了一个平面四连杆机构的堵气机构。
1.3 驱动和转向方式
本机器人采用12v的步进电机驱动,并且采用前轮驱动、后轮导向的方式。采用万向轮导向,万向轮的结构如图2所示。万向轮可由厂家直接生产制造出来,不必另外设计,而且比较容易获得,使用起来也比较方便。安装导向轮的脚轮轮子支架能在动载或者静载中水平360度旋转,从而起到导向的作用。
实现机器人转向的方法很多。常用的有以下几种:(1)差动型转向。对于轮式和履带式机器人的转向来说,差动法是最为常用的方法。当转向时,机器人的一侧轮子或履带停止前进或反向运动,另一侧轮子或履带则继续向前运动,从而使机器人向轮子或履带停止或反向运动的一侧转向。(2)汽车型转向。汽车型转向虽然没有差动型转向的机动性好,但它适用于室外路况,特别是不平坦的路面。采用此种转向方式的机器人其转向圆的圆心在轮子的外侧,而不是在两轮之间,因此可以获得更大一些的牵引力。(3)三轮车型转向。三轮车型转向的最大缺点就是,如果驱动机器人两侧车轮的電机中一个速度略微慢一点,机器人所行进的路径就会变成曲线。使用三轮车型转向的机器人,必须保证其用于转向的两侧电机同步,否则无法保证机器人作直线行进。(4)全方位型转向。这种方式要求机器人有三个具备转向功能的驱动轮,而这些车轮需要两个电机,一个用于转向,另一个用于驱动车轮运转。全方位型转向机器人有很强的灵活性,并且转向准确,但技术实现比较困难[3]。
本设计采用差动型转向。在机器人两侧的相对应位置各安装一个相同型号的电机,分别驱动两个车轮,并且实现差动驱动。机器人的两个轮子以相等的速度和相同的方向转动时,可实现机器人向前或向后的运动;当左轮停转或反转时,可以实现机器人左转向;当右轮停转或反转时,可实现机器人右转向;当两轮以相同速率正转和反转时,机器人将会原地转向,从而实现机器人的原地左转或原地右转。其工作原理如图3所示。
综上可知,本设计的机器人共需要三个轮子。安装在前面的两个车轮是驱动轮,起到驱动的作用,并且两轮独立驱动。安装在后面的一个车轮是万向轮,起到导向的作用。
1.4 主体材料的选择
制作机器人常用的材料主要有以下几种。
(1)木材。选用木材的最大优点是它的价格低廉、加工方便、可直接用手工锯进行加工。但是,它在零件接头的地方较易被损坏和磨损。
(2)塑料。塑料的种类较多,可以根据机器人的不同功能,选用不同的塑料。主要有以下三种塑料可供选择。a.热固性塑料。该种塑料较坚硬,但它只能通过切削来定型,其一般用于硬塑料玩具、电器产品和其他对结构强度有一定要求的产品中。b.弹性塑料。该种塑料具有很高的弹性,其和热固性塑料一樣,不能通过加热的方法来定型。c.热塑性塑料。该种塑料可作不同用途、不同厚度的材料使用。常用的塑料材料有ABS(丙烯腈-丁二烯)、丙烯酸塑料、纤维素塑料、环氧树脂、尼龙、酚醛塑料、聚碳酸酯、聚乙烯、聚丙烯、聚苯乙烯、聚亚氨酯、PVC(聚氯乙烯)、硅树脂。
(3)金属材料。这种材料的强度较大,而且来源广泛,通常选用碳钢和铝合金。但是选用这种材料会使机器人体重增加,会增大电机的负载。
(4)有机玻璃。这种材料比较难获得,而且价格相对其它材料也比较昂贵。
由于制作的自动拾取乒乓球机器人体积较小,要求的重量也较轻,因此,主体的制造材料选用环氧树脂塑料。该材料是一种非常耐用而且干净的塑料,通常用作玻璃纤维的黏合剂。它在大多数情况下成液态,被用于灌注到别的零件或者玻璃纤维基体上。干燥后,环氧树脂可以切割、钻孔和抛光。因此,选用该种塑料作为本机器人的主体材料比较合适。
2 结构设计
2.1 驱动机构
2.1.1 电源的选择
机器人常用的电池有以下几种类型:
(1)干电池。由于干电池属于一次性使用电池,成本也相对较高,并且干电池的内阻一般都比较大。因此,当负载比较大的时候,电压会下降得很厉害,无法实现大电流工况下的连续工作。因此,干电池并不是机器人系统的理想电源。
(2)铅酸蓄电池。它的最大优点是价格较低、耐过充的能力强,大电流放电能力和可靠性高。但是,它的质量比较大,维护起来相对较困难。
(3)镍镉/镍氢电池。它具有良好的大电流放电特性、耐过充和放电的能力强、维护简单等优势。但是,其最致命的缺点是:在充放电过程中,如果处理不当,会出现严重的“记忆效应”,使得电池容量和使用寿命大大缩短。此外,镉是一种有毒金属,因而镍镉电池不利于环境的保护,废弃后必须严格地进行回收。由于其众多的缺点,使得镍镉电池在机器人中的应用越来越少。
(4)锂离子/锂聚合物动力电池。锂离子电池具有重量轻、容量大、无记忆效应等优点。但是,锂离子电池的充电和放电必须严格小心,通常在使用锂离子电池组的时候必须配备专门的防过充电、过放电保护电路。锂离子电池价格也相对比较高,并且需要另外配备保护电路。因此,相同能量的锂离子电池的价格是铅酸蓄电池的十倍以上。
综合实用性和经济性考虑,在本机器人的设计中,选用铅酸蓄电池。本设计采用山东金科力电源科技有限公司生产的铅酸蓄电池,其性能参数如表2所示。[4]
2.1.2 电机的选择
微型机器人使用的电机一般有步进电机、直流电机和直流伺服电机三种类型。这三种电机的控制都相对简单,性能也比较出众,而且直流电源也比较容易获得。
(1)步进电机。它是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,再加上步进电机只有周期性的误差而无累积误差等特点,使对机器人的控制变得简单。
(2)直流电机。它有极宽的功率调节范围,调整特性平滑,适应性好,过载能力较强,而且具有很好的性价比,是一种通用的驱动电机。
(3)伺服电机。它是自动装置中的执行元件,它的最大特点是可控。一般来讲,它主要由以下几个部分组成:舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路板等。
本机器人采用步进电机。
2.1.3 车轮的确定
本自动拾取乒乓球机器人采用前轮驱动、后轮定位的方式。该机器人靠前轮与地面之间的摩擦力驱动前进。因此,前轮作为一个驱动轮,在其上要设置一些花纹,以增大摩擦力。在该机器人的设计中,将前轮的直径设计为64mm。前轮的设计效果如图4所示。
采用万向轮作为导向轮。万向轮一般可由厂家直接生产提供,而且价格也比较便宜。因此,万向轮不需要再另外设计。在本设计中,采用红旗山电子有限公司生产的万向轮,该万向轮的产品编号为:JXGJWXL40,其外形如图5所示。[5]
2.1.4 驱动装置
(1)传动方式的确定
一般来讲,机器人的传动装置主要有齿轮传动、链传动、带传动和蜗杆传动。在本设计中,采用齿轮传动,这样不仅可以使设计变得更加简单,而且齿轮传动也较为平稳。主动齿轮和从动齿轮的模数m为0.8,齿数z为50,则齿轮的直径d=mz=0.8×50=40(mm)。
(2)齿轮与电机轴的连接
为了将齿轮安装到电机轴上,通常要使用紧定螺钉进行连接,如图6所示。大多数的齿轮都有自带的紧定螺钉和用以旋入螺钉的孔。如果没有,可以自己钻孔,并对其攻丝。
图6 使用紧定螺钉将电机轴与齿轮连接起来
(3)前轴的轴系结构
前轴安装驱动轮,它的主要功用是支承零件及传递动力。前轴轴系零件主要有:轴承、从动齿轮、定位套筒、轴承套、前轮和螺母等。各个零部件的安装位置如图7所示。
(4)驱动装置的总体结构
将驱动装置的各个零部件组装起来而成为一个完整的驱动系统,其效果如图8所示。
2.2 捡球机构
2.2.1 吸气装置
由于乒乓球的重量较轻、体积较小,而且比较容易吸取。因此,捡球机构采用微型真空泵吸气装置。首先,机器人判别乒乓球的位置。然后,走到乒乓球的位置前。最后,由单片机控制微型真空泵,使乒乓球被吸进塑料制成的软胶管道,并从出口处出来,进而进入乒乓球存放腔中。为了使机器人具有自我清洁的作用,可以在乒乓球的入口处安放一些毛刷,当乒乓球刚进入管道时,即除去灰尘。
粗塑料软胶管的内径约为60mm,细塑料软胶管的内径约为10mm(分别与微型真空泵的进气口和吸气口连接)。粗塑料软胶管和细塑料软胶管连接的地方,可以用黏合剂将它们连接起来。使用黏合剂连接时,要注意保持接触表面的清洁,并用砂纸打磨接触面。塑料软胶管可以直接购买获得,按图9所示的位置布局并安装。
2.2.2 微型真空泵的选择
(1)型号的确定
为了使乒乓球能够顺利地送出去,可以选用抽气和打气两用的微型真空泵。吸球时,真空泵抽气,将乒乓球捡进来;吸球完成后,真空泵打气,将球吹到存放腔内。本设计选用成都新为诚科技有限公司生产的型号为FAA8006的微型真空泵,其性能参数如表3所示。[2]
(2)配件的选择
真空泵在抽气和打气的过程中,难免会产生震动的现象,从而影响机器人的工作性能和使用寿命。因此,有必要安装一套与微型真空泵配套的减震胶垫。其安装前后的效果如图12所示。
当真空泵工作一段时间后,所抽气体中含有的粉尘会积累在泵腔内部,破坏泵的气密性,使其真空度下降。因此,为了过滤气体中的粉尘杂质,确保真空泵内部的精密气密性元件正常工作,延长泵的有效寿命,有必要在进气管处安装一个过滤器。对于FAA系列的真空泵,选择中号的过滤器较合适。过滤器可以由厂家直接生产和提供,不再需要另外设计。
2.2.3 堵气机构
(1)堵气机构的总体结构
真空泵在吸气的过程中,为了防止空气从乒乓球的出口进入,而无法使乒乓球从入口处被吸起來。因此,必须设计一个堵气机构。当真空泵吸气的时候,乒乓球的出口关闭,其将乒乓球从入口处吸进来;当真空泵吸气完成后,出球口打开,真空泵打气,将乒乓球吹到存放腔内,完成乒乓球捡起的过程。该机器人的堵气机构如图13所示。
(2)工作原理
当真空泵吸气的时候,电磁铁不工作,堵气盖由于弹簧拉力的作用,将乒乓球的出口塞住,防止空气进入。当真空泵吸气完成,电磁铁通电而开始工作,在电磁铁拉力的作用下,堵气盖打开,此时真空泵开始打气,将乒乓球吹出来。乒乓球出来后,电磁铁断电而停止工作,在机器人上的弹簧和电磁铁内部弹簧的共同作用下,堵气机构复位,回复到初始状态,将乒乓球出口塞住,为去吸取下一个乒乓球做好准备。
为了让堵气盖充分地塞住乒乓球出口,减少漏气,故将堵气盖设计成圆锥形状,如图13所示。
(3)电磁铁的选择
电磁铁主要分为以下几种类型:框架式、圆柱式、直立式、拉式、推式、推拉式、单向磁保持式、双向磁保持式、吸盘式等。电磁铁的工作电压一般是直流12V或24V。根据自动拾取乒乓球机器人的工作需要,直流12V电压的拉式电磁铁较合适。
本设计选用武进继电器厂生产的电磁铁,其型号为MQ26,它的主要性能参数如表4所示,其外形如图14所示。[6]
(4)弹簧的选择
在该机器人中,弹簧的作用主要有两个。第一,当真空泵吸气时,堵气盖要靠弹簧的拉力作用将乒乓球出口塞住,防止空气从乒乓球的出口进入,而起不到吸球的效果。第二,乒乓球出来后,电磁铁断电而停止工作,堵气盖要靠弹簧的拉力来复位,从而使机器人为拾取下一个乒乓球做好准备。复位后,安装在机器人上的弹簧依然处于拉伸的状态,使堵气盖紧紧地塞住乒乓球出口,以确保其密封性。
按照弹簧所承受载荷的不同,其可分为拉伸型、压缩型、扭转型和弯曲型4种基本类型;而按照弹簧形状结构的不同,又可将其分为螺旋式、环形式、碟形式、板簧式和平面涡卷式等类型。在本机器人的设计中,采用圆柱螺旋拉伸式弹簧(小号半圆勾环型)。其外形如图15所示。
(5)堵气机构的运动分析与计算
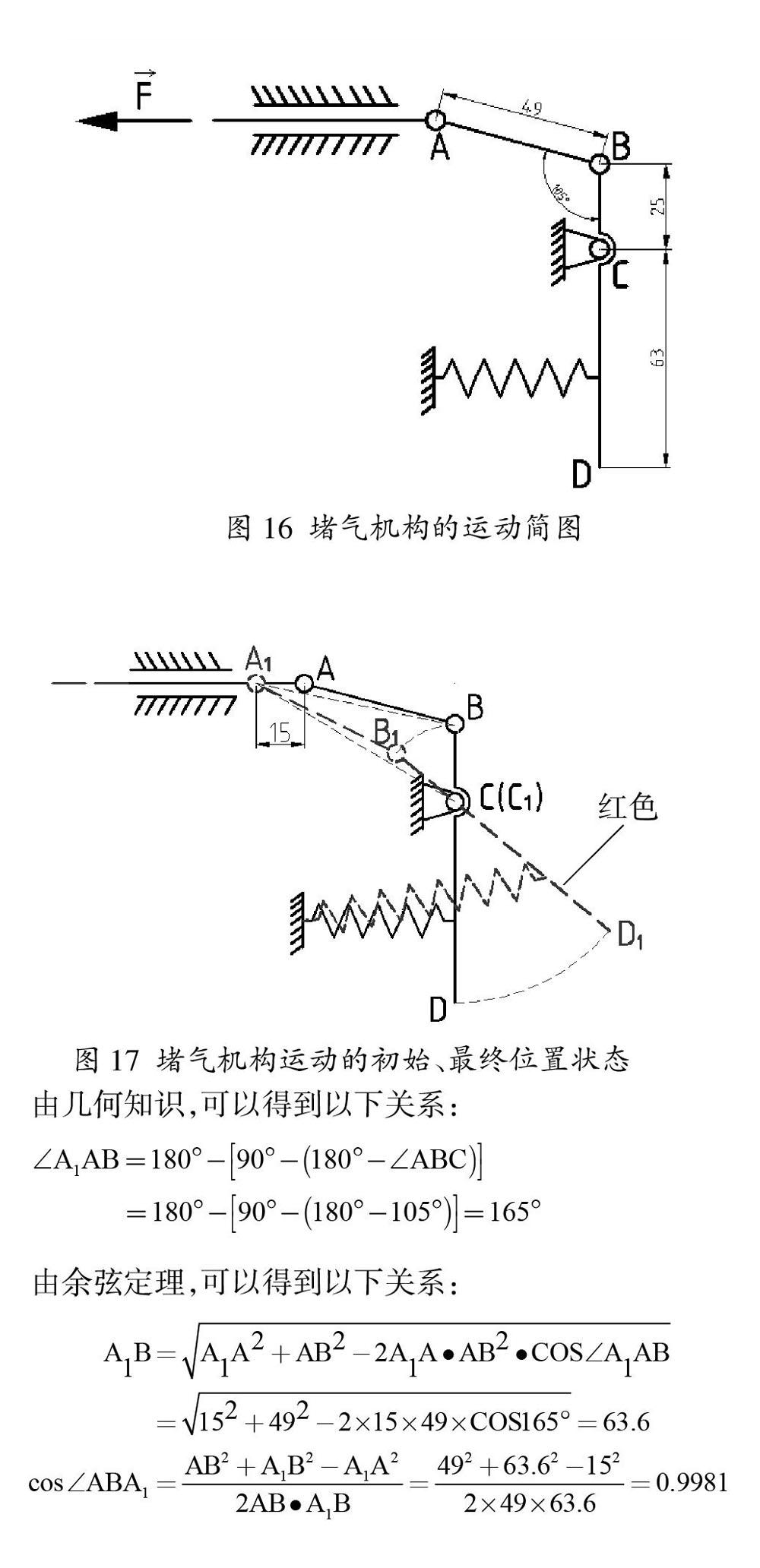
该机构是一个平面连杆机构。平面连杆机构一般具有以下特点。第一,它的运动副往往是低副,而且运动副元素大多数为面接触,其所承受的压力较小,因此其承载能力较大,加工制造较容易。而且,平面连杆机构中的低副一般是几何封闭的,对保证工作的可靠性起到了非常重要的作用。第二,在原动件的运动规律不变的条件下,可以改变各构件的相对长度而使从动件得到不同的运动规律。因此,可以根据机器人的需要和电磁铁的性能参数,设计各个连杆的相对长度和形状。第三,连杆上各点的轨迹是各种不同形状的曲线,其形状随着各构件相对长度的改变而改变,故连杆曲线的形式多样,可满足不同的工作需要。在本机器人的设计中,其堵气机构的运动简图如图16所示。
2.2.4 存放腔的设计
由于机器人的体积较小,如果将存放腔设计成直道的形式,那么它存放乒乓球的数目会比较少。为了使机器人可以一次性装取更多的乒乓球,故将存放腔设计成一个弯曲的形状。这样,存放腔一次可以装取8个乒乓球。
乒乓球的存放腔分为两部分。第一部分是存放腔的轨道,可以用模具加工制造,制造材料采用塑料。也可以用塑料薄片和薄的木板连接起来。为了使乒乓球可以顺利地被存放,将轨道设计成稍微倾斜的形状,防止前球挡住后球而不能顺利进入存放腔。第二部分是乒乓球的护栏,用以防止乒乓球掉落到地面上,其可以用铁丝直接绕成。将这两部分组装起来后,护栏可以向上拨动。这样,当需要将乒乓球从机器人中取出来时,可以将护栏向上拨动,再将乒乓球拿出来。这样的设计不仅可以使存放腔的加工制造较容易,而且使用起来也较方便。乒乓球存放腔的结构图如图19所示。
3 机器人的传感器
3.1 机器人的视觉
机器人要准确判断出乒乓球在球场上的具体方位,就必须要“看到”乒乓球的位置。在自动拾取乒乓球机器人中,采用CCD图像识别传感器来充当机器人的“眼睛”。将CCD传感器和红外线传感器装在机械人“身体”上,并且通过360度旋转来“看到”每个乒乓球的具体位置,再通过控制系统算出最优的行程路线去捡球。
CCD图像识别传感器有以下几方面的优点:(1)清晰度高。像点的大小为μm级,可感测及识别精细物体,影像品质高。(2)敏感度高。很低光度的入射光也能被其侦测到。(3)适用环境范围广。它可以同时侦测及分辨强光和弱光,不因亮度差异大而造成信号反差现象,适用环境范围广。(4)良好的线性特性曲线。(5)大面积感光。(6)体积小、重量轻。
3.2 机器人的触觉
机器人在乒乓球场上工作的时候,难免会遇到障碍物或者碰到墙壁,这会使机器人失去自动捡球的功能,达不到预期的效果。为了克服这一困难,本设计在机器人的“身体”上安装了一个胡须触觉开关。当机器人遇到障碍物或碰到墙壁时,胡须触觉开关就会自动“察觉”到,并且自动与其避开。胡须触觉开头及它在电路板上的安装示意图如图20所示。
3.3 机器人的计数功能
由于设计的自动拾取乒乓球机器人一次最多只能存放8个乒乓球。因此,机器人每次捡起一个乒乓球时,都必须要自动地进行计数。本设计采用光电计数器进行计数。
光电计数器的应用非常广泛,具有高的可靠性,并且可以实现自动控制的功能,使用起来较为方便。将光电计数器安装在机器人吸气嘴的入口处,每当机器人捡起一个乒乓球时,系统就会发送一个脉冲,光电计数器则计数为1。这样就可以简单地实现自动计数的功能。
4 设计的总效果与工作流程
4.1 設计的总效果
将机器人各个机构的零部件组装起来,并且用UG NX6.0软件构建相应的立方体模型,所得到的效果图如图21、图22和图23所示。
4.2 工作流程
本自动拾取乒乓球机器人的详细工作流程如下:
(1)机器人通过声控装置识别并接收捡球命令。
(2)用图像传感器和红外线传感器定位乒乓球的位置。
(3)控制系统控制机器人驱动装置的左右两个驱动电机,实现机器人直走或者转弯,使机器人走到乒乓球相应的位置。
(4)机器人控制系统使微型真空泵启动,真空泵吸气,将乒乓球吸入管道内,安装在吸嘴处的毛刷即时清洁乒乓球表面的灰尘。
(5)当乒乓球到达管道内相应的位置时,真空泵停止工作。
(6)电磁铁通电而开始工作。在电磁铁拉力和堵气机构的作用下,机器人的堵气盖打开。
(7)机器人控制系统使真空泵处于打气状态,将乒乓球吹入存放腔中。
(8)电磁铁断电而停止工作。乒乓球出来后,电磁铁断电,在机器人上的弹簧和电磁铁内部弹簧的共同作用下,堵气机构复位,回复到初始状态,将乒乓球出口塞住,为去吸取下一个乒乓球做好准备。
(9)机器人继续去捡下一个乒乓球。当需要取出乒乓球时,用人工的方法将存放腔的护栏拨动,取出乒乓球。
5 结论
本自动拾取乒乓球机器人的机械结构设计,体现了一定程度的创新。第一,仿照日常生活中吸尘器的原理,采用真空泵将乒乓球吸取。现有应用在乒乓球场上的机器人,大多都是设计一个机械手直接抓取乒乓球,这不但会使设计过程更加繁琐,而且其控制系统的设计也较为复杂,制造成本也会相应地增加。这明显不利于在市场上的推广与应用。第二,用一块电磁铁和一个非常简单的平面连杆机构就可以将出球口塞住,防止空气进入,这个机构虽然简单,但可靠性比较高、实用性也比较强,而且制作起来也比较容易。
参考文献:
[1](美)Gordon McComb,(美)Myke Predko.机器人设计与实现[M].庞明,王晓宇,译.北京:科学出版社,2008.
[2]成都新为诚科技有限公司.微型真空泵[EB/OL].http://www.wcjx.net/faq.htm.
[3]朱孝录.齿轮传动设计手册[M].北京:化学工业出版社,2005.
[4]蓄电池.中国[EB/OL].http://www.batterychn.com/.
[5]万向轮[EB/OL].https://www.forrun.cn/catalog/305/.
[6]常州武进继电器厂.微型电磁铁[EB/OL].http://www.cn002.com/index.html.
