一种基于改进卡尔曼滤波的无人机信道估计算法
2019-06-25施华杰肖曼琳陈兴杰
施华杰,肖曼琳,郑 棋,陈兴杰
(上海工程技术大学 城市轨道学院,上海 201620)
0 引言
无人机下行数据在传输过程中,因复杂环境变化造成的折射、反射和散射,会引起信号的损耗,产生多径衰落;同时,传输信号受无线信道中存在的高斯白噪声与外界电磁波影响。如何提高传输速率、有效抵抗多径衰落一直是无人机通信研究的主要问题。OFDM技术作为一种高速率数据传输方案,具有抗衰落能力强、频率利用率高和抗码间干扰能力强等优点,适用于无人机高速数据传输链路。在OFDM系统中,接收信号通常因为受到信道特性的影响而失真。为了恢复发射端的发送信息,在接收端需要估计信道信息以补偿对信道的影响,因此信道估计是OFDM系统接收端设计的关键技术之一。
文献[1]提出了无人机信道模型,通过无人机不同飞行状态下不同信道条件,从衰落、时延频率谱和多普勒功率谱角度分析无人机信道时变特性,将无人机信道分为空中飞行状态、起飞与降落状态、滑行状态与停机入库状态4种模型,本文主要研究了空中飞行状态信道模型;文献[2]针对无人机下行链路提出了采用格状导频插入方式和最小均方误差(MMSE)算法,但是无人机信道属于快时变信道, MMSE估计算法复杂度较高,应用条件比较苛刻,并不适用于高速环境;文献[3]提出了一种有限脉冲响应(FIR)信道估计滤波器,当信道模型参数不正确时,该FIR信道估计滤波器比传统的卡尔曼滤波器具有更强的鲁棒性,但算法采用平坦衰落信道,不符合无人机信道快衰落特性。
本文主要研究一种改进的无人机信道估计算法。首先,基于无人机数据传输链路信道特性,建立无人机低空信道模型;再通过LS算法估计出导频处信道冲激响应,采用卡尔曼滤波对导频处信道冲激响应进行估计,并使用插值算法恢复传输数据信息的子信道处信道冲激响应;最后利用无人机时变信道的频域相关特性,利用最小均值误差准则估计修正估计结果,提高估计精度,减少噪声干扰,更利于跟踪无人机时变信道。
1 无人机通信系统模型
无人机通信面临着高传输速率、多径衰落和多普勒频偏等挑战,本文基于无人机通信面临的需求,参考实际运用情况,设计了一种传输速率可变的OFDM无人机通信系统[4],采用了符合无人机飞行状况的无线信道,构建了无人机通信传输系统。
1.1 系统模型
无人机在飞行状态下的通信传输通常具有以下特点:① 无人机的高速飞行,会造成多普勒频移;② 无人机信号与地面设备的传输受到多径效应的影响,存在频率选择性衰落;③ 无人机信号可利用的带宽有限,需要提高频谱利用率[5]。OFDM技术具有抗多径衰落、提高频谱利用率及适用于高速率传输等特点,能够满足无人机通信面临的需求。本节设计了一种适用于无人机下行数据传输链路的OFDM通信系统,系统框图如图1所示。

图1 OFDM系统框图
图中,信息比特流经过映射器(QAM或PSK)调制后通过串并转换,转换成N个并行信号,每个并行信号被不同频率子载波调制,然后插入导频,对插入导频的并行信号进行IFFT变换,得到时域信号x(n):

(1)
式中,N为子载波个数,X(k)为插入导频后的并行频域信号[6]。为了防止码间干扰,需要在OFDM符号间插入保护间隔,选择利用循环前缀(CP)来实现对OFDM符号的扩展,得到xcp(n),xcp(n)经过串并转换后进入无线P信道,在接收端去除循环前缀恢复成时域信号y(n):
y(n)=x(n)⊗h(n)+w(n),n=0,1,…,N-1 ,
(2)
式中,h(n)为信道的时域冲激响应,w(n)为信道的加性高斯白噪声,⊗表示时域信号x(n)与h(n)作卷积运算[7]。
对y(n)进行FFT变换,得到频域信号Y(k):

(3)
式中,W(k)为叠加在第k个子载波上的加性高斯白噪声,是w(n)的FFT变换。
1.2 无人机下行链路信道模型
空中飞行状态下,根据多普勒频移fD、相位入射角θn和时延扩展τn等影响因素,无人机信道模型可构建为两径模型[8],第k时刻的信道冲激响应为:
hk=a·hLOSk+c·hk=
exp(j2πfDnkTs)δ(t-τmax),
(4)
式中,a为视距分量的幅度,c为散射分量的幅度,fDLOS为LOS径的多普勒频移,Ts为采样时间,θn为相位,满足在[0,2π)上均匀分布。
无人机在空中巡航时,散射分量的角度通常小于360° ,令φL为散射分量到达无人机的最小角度,φH为散射分量到达无人机的最大角度,图2为无人机在空中巡航时入射角的分布,φL=178.25°,φH=181.75°[9]。
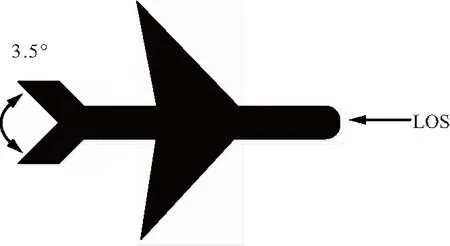
图2 无人机空中巡航状态下入射角分布
此时有限量的散射分量入射角度均匀分布在(φL,φH)上,离散径的多普勒频率fDn表示为:
fDn=fDmaxcos(φL+(φH-φL)·un),un∈[0,1)。
(5)
无人机空中飞行状态信道模型如图3所示,τmax为最大时延,且有莱斯因子满足KRice=a2/c2。

图3 无人机空中飞行状态信道模型
目前,普通民用与工业用无人机最高时速一般为50~60 km/h[10],本文研究飞行状态下时速为50 km/h、飞行高度达1 200 m的无人机信道估计。飞行状态下无人机两径模型信道具体参数设置如表1所示。
表1 无人机飞行状态下信道参数

参数空中巡航速度(km/h)50载波频率/GHz2.40最大时延τmax/s5×10-6莱斯因子KRice/dB15.00入射开始角φL/(°)175.25入射结束角φH/(°)181.75
2 信道估计技术
无人机在空中巡航期间,其高度、移动速度以及所处复杂环境导致无线信号的传输受到无线信道的制约,产生幅度衰落、相位偏差和多普勒扩展等失真,同时信道环境快速变化,信道的先验信息难以预知,再加上信道具有时变特性,目前适用于地面无线移动通信的信道估计方法都不能良好适应于无人机信道估计的要求[11]。因此,如何在信号接收端完成信道估计,尽可能恢复发射信号,一直是无人机下行链路数据传输需要解决的主要问题。目前,信道估计技术主要包括盲信道估计、基于导频训练符号的信道估计和半盲信道估计[12],本文主要研究基于梳状导频训练符号的信道估计,采用一种改进卡尔曼滤波结构,提高无人机下行链路信道估计性能。
2.1 梳状导频描述
无人机的高速移动决定了无人机信道具有快衰落信道的特性,由于梳状导频在时域上是连续估计的,具有较强的抗快衰落的能力[13],本文采用梳状导频结合卡尔曼滤波进行估计。设导频数为Np,则Np个导频信号Xp(m),m=0,1,...,Np-1 均匀插入到有用信号X(k)中。导频间隔为L=N/Np。第k个子载波上OFDM信号表示为:
(6)
导频处的接收信号表示为:
Yp[n]=Xp[n]Hp[n]+Wp[n] ,
(7)
其中,Yp[n]=[Y1[n],……,YNp[n]]T,Xp[n]是一个以导频符号Xk(n),(k=1,2,…,Np) 为对角元素的对角矩阵,Hp[n]=[H1[n],…,HNp[n]]T为导频信道冲击响应向量,Wp[n]=[W1[n],…,WNp[n]]T为导频处高斯噪声向量。
2.2 卡尔曼滤波器算法
采用LS信道估计算法进行一次信道频域响应估计,构造卡尔曼滤波器的状态空间模型,利用先验信道信息估计卡尔曼滤波后的信道冲激响应。卡尔曼滤波器是一种线性递推算法,相比维纳滤波器,它只需要前一次历史信息,极大减少了计算量,适用于信道估计算法[14]。卡尔曼滤波器表示为:

(8)

a=J0(2πfdTs) ,
(9)
(10)
(11)
式中,Hn为第n个OFDM符号时刻时的导频处信道频域响应,也是系统的状态变量;Fn为系统的状态转移矩阵,该矩阵由信道的时域相关系数构成[16]。Vn和Wn分别为系统的过程噪声和观测噪声,二者为相互独立的零均值复高斯白噪声。
在式(12)组成的状态空间模型中,信道脉冲响应h(n)可以通过经典卡尔曼滤波器递归地估计出来。
Hn|n-1=AHn-1,
(12)
Pn|n-1=APn-1AH+Q,
(13)
Kn=Pn|n-1(X)H(XPn|n-1XH+R)-1,
(14)
e=Y-XHn|n-1,
(15)
(16)
Pn=(I-KnX)Pn|n-1,
(17)

2.3 改进的无人机信道估计算法
该算法的主要流程为:
① 利用LS信道估计算法计算卡尔曼滤波初值
在梳状导频处,发射信号的导频序列Xp已知,利用LS信道估计算法可以估计导频处信道冲激响应为:
(18)

② 进行卡尔曼滤波
③ 利用频域特性并基于SVD分解对卡尔曼滤波结果进行优化


(19)
在MMSE准则下,可以得到优化信道估计为:
(20)

利用奇异值分解法对自相关矩阵Rf进行分解,得:
Rf=UΛUH,
(21)
式中,Λ为对角矩阵,其元素为Rf的N个特征值,即
式中,N个特征值的大小满足λ0≥λ1≥…≥λN-1。U为特征值对应的特征向量所组成的酉矩阵。因此,Rf(Rf+F)-1可以变换为:
Rf(Rf+F)-1=U[Λ(Λ+F)-1]UH,
(22)
令
(23)

取上式中对角矩阵的前m个较大的特征值对应的向量,记为Δm。一般取m为循环前缀的长度,可以得到导频处信道频率响应为:
(24)
综合考虑算法性能与复杂度,本文采用精度良好、复杂度较低的线性插值在频域进行插值获得非导频处信号信息。
3 仿真分析
在仿真阶段,为了研究无人机飞行状态下时变信道估计算法的性能,对改进的联合卡尔曼滤波与导频符号的信道估计方法进行了仿真,并与基于导频训练符号估计的LS算法和MMSE算法作了比较。基于无人机信道特性,无人机下传数据链路所采用OFDM系统参数具体设置如表2所示。飞行状态下,无人机经过的信道模型为两径模型和加性高斯白噪声模型。信道系统参数设置中保护间隔循环前缀CP长度大于最大时延长度,以减少符号间干扰。
表2 OFDM系统参数设置

参数名称设置数值载波频率/GHz2.4飞行速度/(km/h)50信道路径数4子载波数512OFDM符号数150CP长度16导频间隔4导频插入方式梳状导频采样时间/s8×10-7调制方式16QAM插值方式线性插值蒙特卡洛次数100
图4~图6表示在两径模型和加性高斯白噪声信道下,信噪比为-10 dB时,选取某一时刻采用传统的LS,MMSE算法与本文所述改进卡尔曼滤波算法所得的信道估计响应频率与真实信道频率响应的包络对比图。从图中可以看出,在低信噪比的环境下,LS算法性能最差,受噪声影响很大。MMSE算法相比LS算法能更好地模拟真实信道,信道幅度与真实信道幅度变化趋势一致。然而,与真实信道相比,MMSE算法在精度上仍然存在一些误差。与LS算法和MMSE算法相比,改进卡尔曼滤波算法性能最好,能良好吻合真实信道,精度最高。

图4 真实信道与LS算法所得信道包络

图5 真实信道与MMSE算法所得信道包络

图6 真实信道与改进卡尔曼算法所得信道包络
图7为无人机飞行时速为50 km/h、飞行高度为1 200 m时,采用两径模型与加性高斯白噪声模型,采用本文所述改进卡尔曼滤波算法与传统的LS,MMSE算法的信道估计响应频率的均方误差仿真曲线图。

图7 两径模型下不同估计算法的均方误差
从图7可以看出LS算法性能最差,相同信噪比下,MMSE算法比LS算法精度有10倍左右性能提升,卡尔曼滤波算法比MMSE算法又有约10倍的性能改善。本文提出的改进卡尔曼滤波算法相比传统卡尔曼滤波算法,在信噪比低于0时,性能有一定提升,随着信噪比降低,估计性能提升愈加显著。无人机所处环境经常面临低信噪比的情况,因此相比传统的卡尔曼滤波算法,改进卡尔曼算法更适用于无人机信道估计。
图8为改进卡尔曼算法下采取不同导频数量时的性能比较。从图中可以看出,随着导频数量的增加,改进卡尔曼算法的性能进一步增加。其中,当信噪比大于0 dB时,导频数为6时的估计性能始终比导频数为4时的估计性能高5 dB,而导频数为8时的估计性能始终比导频数为6时的估计性能高,并且比导频数为4时的估计性能高5~10 dB左右。考虑到导频数量的增加会影响信号传输效率,可以根据实际情况选择合适的导频数量,避免资源的浪费。本文选取了导频数量为4进行仿真实验。

图8 改进卡尔曼算法下不同导频数量的均方误差
4 结束语
研究了无人机在飞行状态下的信道建模,搭建了适用于无人机下传数据链路的OFDM系统,采用了适用于无人机在空中飞行状态下的无线信道模型,提出了一种适用于无人机信道的改进卡尔曼滤波算法。该算法充分考虑了无人机时变信道的时频特性,提高了算法精度,同时利用SVD分解对相关矩阵进行降秩处理,简化运算过程,提高运算速率。仿真结果表明,在无人机飞行速度为50 km/h、飞行高度达1 200 m时,改进卡尔曼滤波算法能良好跟踪时变信道信息,适用于无人机下行数据传输链路通信系统。随着无人机通信的发展,利用OFDM技术提高不同环境与飞行状态下无人机的信道估计精度仍是一个重要研究方向。
