涵道风扇式高地隙杂交水稻制种授粉机设计
2019-06-20周志艳钟伯平刘爱民刘又夫田麓弘罗锡文林宗辉
周志艳,钟伯平,刘爱民,何 越,刘又夫,田麓弘,罗锡文※,林宗辉
(1. 华南农业大学工程学院/广东省农业航空应用工程技术研究中心,广州 510642;2. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642;3. 国家精准农业航空施药技术国际联合研究中心,广州 510642;4. 袁隆平农业高科技股份有限公司,长沙410006)
0 引 言
杂交水稻的推广运用,为解决中国和世界的粮食安全问题做出了巨大贡献[1]。杂交水稻制种是杂交水稻生产的重要组成部分,授粉又是杂交水稻制种的关键环节;充分、均匀的授粉是提高制种质量和产量的前提保障[2];目前,杂交水稻制种辅助授粉方法主要以传统人力式为主,机械辅助授粉方法尚在研究与示范中。
传统人力式辅助授粉主要包括单长杆赶粉法、双短杆推粉法以及绳索拉粉法[3],通过绳索、竹竿等与父本稻穗碰撞,将从花药散出的花粉扬起,花粉借助自然风作用扩散至母本,完成授粉[4]。传统人力式辅助授粉作业具有劳动强度大,生产效率低等缺点[5],已难以满足现代化制种的需求。
机械辅助式主要是通过一些可靠的工具代替人力,主要包括气力式、碰撞式以及无人机风力等[6]。气力式机械辅助授粉的原理为利用风机产生定向可调的气流将父本的花粉扬起,在合适的风速、风场作用下,花粉传播至母本上,完成授粉。胡达明等[7-10]以风机为动力源,试制了气力式授粉机,进行杂交水稻授粉,相较于传统人力式辅助授粉,取得了较大的进步,但气力式辅助授粉仍存气流速度控制不精准、花粉受流场影响较大等问题,授粉效果仍有较大的提升空间。碰撞式辅助授粉主要原理为模仿传统人力式竿、绳等对父本稻穗的碰撞原理,利用机械碰撞实现辅助授粉,但碰撞式辅助授粉过程中,存在对父本植株造成损伤、作业效率不够高等问题,授粉效果并不理想[11]。
近年来,无人机风力辅助授粉得到运用,其原理为旋翼所形成的下旋风将花粉扬起,并随着旋翼所形成的气流,将花粉飘散至母本完成授粉。汪沛等[12-15]运用无人机对杂交水稻制种辅助授粉进行了深入研究,取得了较好的效果,但无人机辅助授粉目前存在续航时间短、效率低、对操控人员技术要求较高等问题[16],大面积推广应用仍需进一步优化改进。
为了寻求更高效、更可靠的辅助授粉方法,本研究拟设计一种涵道风扇式高地隙杂交水稻制种授粉机,采用计算流体力学(computational fluid dynamic,CFD)技术对涵道风扇式授粉器的流场特性进行仿真研究与试验分析,并试制样机进行田间试验,测试该样机授粉作业后花粉在母本厢内的分布规律,为杂交水稻制种授粉机的授粉器类型的选择、结构的进一步优化改进提供理论依据。
1 涵道风扇式高地隙杂交水稻制种授粉机
1.1 整体结构组成
涵道风扇式高地隙杂交水稻制种授粉机由高地隙动力底盘、微型汽油发电机、直流电源、桁架、桁架自动调平装置、涵道风扇启动控制器、桁架升降机构以及涵道风扇式授粉器等组成,整体结构如图1所示。

图1 涵道风扇式高地隙杂交水稻授粉机整体结构示意图Fig.1 Schematic diagram of whole machine model of ducted-fan pollination machine based on high-clearance chassis for hybrid rice
微型汽油发电机与直流电源固定安装在高地隙动力底盘尾厢上;在桁架两端以及桁架中心位置处,分别安装 3组授粉器(依据行车方向,从左到右依次命名为左授粉器、中授粉器、右授粉器),每组授粉器由两个气流方向相反的涵道风扇组成,安装时,3组授粉器的气流在幅宽方向上保持平行。辅助授粉作业过程中,3组涵道风扇式授粉器由启动控制器统一操控,保证 3组涵道风扇式授粉器出风口处的气流速度基本一致。
1.2 工作原理
高地隙动力底盘离地间隙为1.7 m,轴距为2.4 m,轮距为2.5 m,正好能横跨一厢父本(8行,厢距为2.0 m,为减少轮胎对水稻的碾压,预留了作业行车道,约30cm);桁架单侧幅宽为 11.0 m,正好覆盖侧面的一厢母本,末端抵达另一厢父本。图2为授粉作业示意图。
如图 2所示,进行田间辅助授粉时,涵道风扇式高地隙杂交水稻制种授粉机横跨行走在其中一厢父本冠层上方,中授粉器作用在父本厢正中心线上;沿着行进方向,左授粉器作用在授粉机左侧一厢父本中心线上,右授粉器作用在授粉机右侧一厢父本中心线上。各组授粉器的气流左右可以分别作用于父本厢两侧的半厢母本,依照研究给定的种植农艺要求,父本厢宽为2.0 m,母本厢宽为8.5 m,所设计的授粉机单次授粉作业覆盖宽度可达31.5 m,单次授粉作业幅宽计算如下。

式中H为单次授粉作业所覆盖的幅宽,m;ħ为一组授粉器所覆盖的幅宽,m。

图2 授粉作业示意图Fig.2 Schematic diagram of pollination operation
在赶粉作业过程中,3组授粉器通过桁架自动调平装置保证水平方向基本上处于同一高度,涵道风扇式授粉器斜向下 0~30°(角度可调)紧贴父本冠层,授粉器所产生的气流作用于父本稻穗穗层,使父本稻穗震荡,花粉随着气流扬起,飘散至母本上,实现授粉。该机授粉作业行走速度为1.5 m/s,作业效率可达7 hm2/次(每次授粉时间30 min)。
2 涵道风扇式授粉器的流场数值仿真
涵道风扇式授粉器是授粉机的关键部件,为了解涵道风扇式授粉器内部旋翼在高速旋转运动下的流场分布特性,得到较优的设计参数,以利于指导实际的样机制作,即:选用何种最经济的旋翼转速来满足杂交水稻授粉时花粉扬起和悬浮运送的最低要求。拟采用计算流体力学软件对涵道风扇式授粉器进行仿真试验研究。格子波尔兹曼方法(lanice boltzmailn menods, LBM)相比于其他传统CFD计算方法,具有介于微观分子动力学模型和宏观连续模型的特点,因此具备流体相互作用描述简单、复杂边界易于设置、复杂模型网格自适应等优点[17],且其计算效果比较准确[18-19],故采用基于 LBM 方法的XFlow(next limit dynamics S.L.)试验平台对涵道风扇进行数值模拟,分析涵道风扇式授粉器的流场特性分布,并进行优化设计。
每组授粉器由2个气流方向相反的涵道风扇组成,2个涵道风扇的出入口相互错开,不在同一个轴线上,且2个涵道间有一定间距,所形成的气流场互不干涉,因而为了降低仿真研究难度及研究工作量,将授粉器物理模型简化为单涵道风扇模型。
2.1 涵道风扇式授粉器的物理模型
涵道风扇式授粉器物理模型采用Solidworks 2016进行建模,旋翼模型采用三维扫描仪(MetraSCAN 3D型,CREAFORM公司产品)扫描所得,基本尺寸如下:旋翼直径为390 mm,旋翼采用可折叠式布局(碳纤维复合浆);涵道内径为400 mm,壁厚为3 mm,两叶旋翼通过旋翼夹片安装在无刷电机上,电机则安装在涵道十字型电机底座上,涵道入风口一侧覆盖保护网,防止作业中水稻穗头进入涵道,如图 3所示,考虑到安装误差,旋翼与涵道内壁的间距保证在3~5 mm。
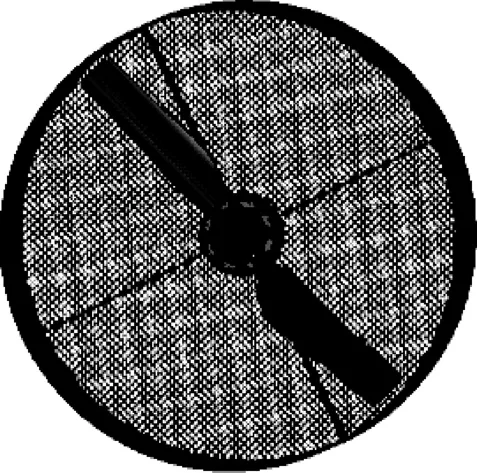
图3 涵道风扇式授粉器模型Fig.3 Ducted-fan type pollinator model
2.2 授粉器模拟方法
McNamara等[20]于1988年首次提出了LBM的DiQj基本晶格模型(i维空间,j离散速度),相对其他传统CFD方法,LBM在处理复杂边界层的流体流动时有独特优势,它可分为D2Q7、D2Q9、D3Q19以及D3Q27四类晶格模型,Xflow采用的LBM方法计算域均为立方体单元,拟采用D3Q27晶格模型进行授粉器的仿真,该晶格模型为3维27个离散速度,其中分别为1个速度为0的点、6个由晶格体心指向晶格面中心、8个由晶格体心指向晶格顶点以及12个由体心指向晶格边中心的速度,如图4所示。

图4 D3Q27晶格模型Fig.4 Lattice of D3Q27 model

式中x∈Γ为格子上的某一个格点,{ξi=1,2,…,n}为流体粒子的离散速度集合,fi为以速度ξi运动的速度分布函数,tφ为离散时间步长,t为当前时间步;Wi为碰撞算子,即表示粒子间的碰撞对速度分布函数的影响,φ为无量纲松弛参数。Γ 为一个自封闭系统,即如果x∈Γ则 x +ξiφt∈Γ,则LBM方法中流体粒子总是再网格线上运动。在引进BGK(bhatnagar- gross-krook)碰撞算子的近似简化后,该方程可还原为描述不可压缩流体流动的控制方程,即Navier-Stokes方程,即可求解不可压缩流体低马赫数的流体动力学问题。
2.3 湍流模型
为准确模拟涵道风扇式授粉器的流场特性,使用大涡模拟(large eddy simulation, LES)的壁面自适应局部黏度模型(wall adapting local eddy, WALE),提供一定的局部涡流黏度和近壁特性[21],数值求解过程执行方程[22]为

式中tυ为模拟亚格湍流涡流黏度,Gdαβ、Sαβ分辨尺度应变率张量,δαβ为克罗内克尔符号,gαβ、gβα、gγγ为应变率张量,Δf为滤波器尺度,Kw为常数(一般取0.325),Δ为单位网格尺度,α、β、γ为空间方向,三维空间取1、2、3,晶格模型采用三维空间模型。
2.4 数值求解
数值求解边界条件设定如下:设置计算域为在X、Y、Z方向尺寸分别为12.0、12.0、12.0 m的正方体,如图5所示。
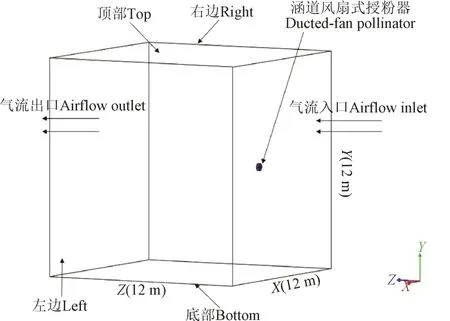
图5 涵道风扇式授粉器计算域示意图Fig.5 Schematic diagram of ducted-fan pollinator computational domain
涵道电机式授粉器拟选用的无刷电机KV(指的是输入电压每增加1 V,直流无刷电机空载转速增加的值[23]。)值为180,额定电压为60 V,为了确定较经济的转速参数,仿真的转速设置了3个梯度:7 000、9 000、11 000 rad/min。
为了满足全程机械化制种的需求,农艺专家提出采用8:35的大行比种植农艺要求,即:父本厢宽为180 cm,母本厢宽为850 cm,前述授粉机主要是针对该种植条件进行设计。授粉器处于父本厢的中间,单侧流场覆盖0~6 m区域即可,由于0 m不利于监测气流速度,故设置了0.3~6 m气流速度监测区域,该区域分为0.3、1、1.5、2、3、4、5、6 m等8个面,为了便于速度监测与论文撰写,只监测0.3、3.0、6.0 m这3个监测面的数据。
2.5 涵道风扇式授粉器仿真结果
涵道风扇式授粉器出风口不同距离气流速度的仿真结果如表1所示。当无刷电机转速为7 000 rad/min时,出风口监测区域范围内气流速度为 2.5~8.0 m/s,9 000 rad/min时为 4.0~12.8 m/s,11 000 rad/min时为5.0~14.0 m/s。

表1 授粉器出风口不同距离处仿真气流速度Table 1 Simulated airflow velocity at different distances of pollinator outletm·s-1
当转速为9 000 rad/min时,各监测截面对应的气流速度云图和压力云图如图6所示。授粉器在计算域内YZ面气流速度流场图如图7所示。由图6可知,在0.3和3 m 2处监测点的气流速度流场分布较稳定,涵道对旋翼旋转后所形成的气流起到一定的环括作用,一定区域内起到了避免旋翼旋转后所形成的气流向四周扩散。

图6 转速为9 000 rad·min-1时不同截面云图分布Fig.6 Different cross-section cloud map distribution when revolving velocity is 9 000 rad·min-1

图7 计算域内YZ面流场图Fig.7 YZ surface flow field in computational domain
根据雷瑶[24]的研究可知,下洗气流随旋翼转速的增加,其下洗气流由中心逐渐向四周扩散,不同的转速条件下,扩散的程度和分布情况有较大差异。从图7中可看出,所仿真的3个不同转速下,出风口的流场图存在较大差异,转速为7 000和11 000 rad/min时,沿Z轴中心方向上存在布部分速度分布缺失现象(如图7a、7c所示)。
根据前人的研究结果,杂交水稻制种授粉的适宜风速为3.5 m/s,授粉过程中,气流速度满足授粉要求时,气流截面作用范围越大,越有利于父本稻穗花粉的扬起,且在气流场中心轴线气流速度越均匀,对提升花粉运送距离及均匀性越有帮助[9,25-27]。授粉器在计算域内 YZ面流场中,图7a中编号为1的区域和图7c中编号为2的区域代表沿轴线方向上气流速度异常区域,说明电机转速为N=7 000 rad/min和N= 11 000 rad/min 时,气流速度分布均匀性较差;当N= 9 000 rad/min时,不存在上述异常区域,其气流速度分布均匀性较优。且从表 1所示的仿真数据结果可看出,距离出风口 6.0 m处的平均风速达4.0 m/s时,已达到杂交水稻制种授粉的适宜风速,因此,选择9 000 rad/min的无刷电机转速为较优的作业参数。
3 样机的实测验证
3.1 授粉器仿真结果的室内实测验证
为了验证仿真计算所得到的无刷电机转速为较优的作业参数是否与实际相符,制作了涵道风扇式授粉器的样机,采用台架的方法进行室内实测验证试验,如图 8所示,授粉器安装于试验平台上,在距出风口0.3、3.0、6.0 m等3个点位(与仿真分析结果对应)布置风速测量点,采用手持式风速仪(HP-866A,华普仪器股份有限公司)测量轴心区域的风速情况,每个点位对应的截面内测量 8次,取平均值。授粉器采用按键式开关直流电源(XA-1-70V-100A,深圳鑫立科技有限公司)供电。实测的风速数据如表2所示。
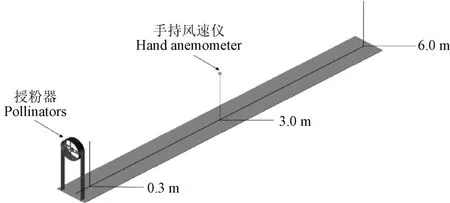
图8 授粉器气流速度室内实测试验示意图Fig.8 Schematic diagram of air velocity measurement test of pollinator

表2 授粉器出风口不同距离处室内实测气流速度Table 2 Indoor measured airflow velocity at different distances of pollinator outlet(m·s-1)
实测与仿真的数据结果表明,室内实测气流速度与仿真所测得的气流速度相比较,两者之间的差值为0.2~2.0 m/s;当无刷电机转速N=9 000 rad/min 时,距离出风口6.0 m处实测与仿真气流速度分别为4.2和4.0 m/s,两者仅相差4.7%,说明仿真计算所优选的N=9 000 rad/min无刷电机转速的气流速度流场与实际应用中的表现相吻合。
3.2 整机的田间试验方法
试验于2018年8月10日至17日在湖南省武冈市邓元泰袁隆平农业高科技股份有限公司杂交水稻制种基地进行,制种组合为:4001 S/黄莉占。父母本采用8:35的大行比种植。父本厢距为2.0 m,母本厢距为8.5 m。
试验前,将PVC管(长:1.3 m)设置在母本厢内作为花粉数据采集点,使PVC管上端与母本厢的穗层持平,同时将涂有凡士林的载玻片水平固定于PVC管的顶端,用于采集花粉。母本厢区域内共设置60个采集点,按3行20列的形式排列(采集点前后间距为3.0 m、左右距离为1.0 m)。涵道风扇式高地隙杂交水稻制种授粉机田间授粉试验如图9a所示,花粉数据采集点的布置如图9b所示。
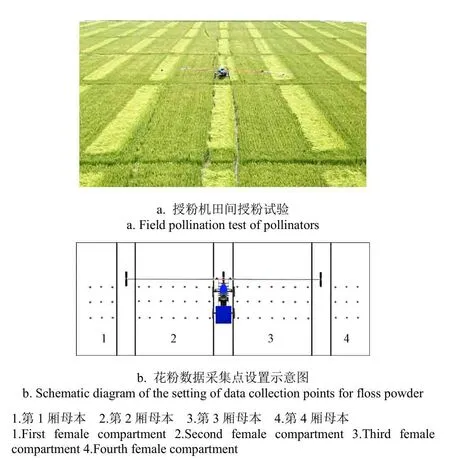
图9 田间授粉试验及花粉数据采集点设置Fig.9 Field pollination test and pollen data acquisition point setting
根据前文所优选的作业参数设置涵道风扇式授粉器电机转速为9 000 rad/min(距出风口0.3 m出气流速度为12.8 m/s),授粉机以1.5 m/s的行走速度在田间进行授粉试验。同时,采用农用无人机(P20,广州极飞科技有限公司)赶粉作业为对照组,无人机作业的飞行高度为1.5~2 m(距离父本冠层),速度为 4.0~4.5 m/s。授粉作业完成后,将采集花粉的载玻片收回,回收后的载玻片(用8%的I-IK溶液染色)置于显微镜下(江南XSP-16A),放大(10×10倍)观察并计数每个视野内花粉数;在盛花期内,连续采集3 d花粉数据。每天进行2~3次授粉作业,每次授粉间隔15~20 min。
3.3 整机田间试验结果与分析
田间授粉试验后,测得的 4厢母本内花粉分布情况如图10所示。
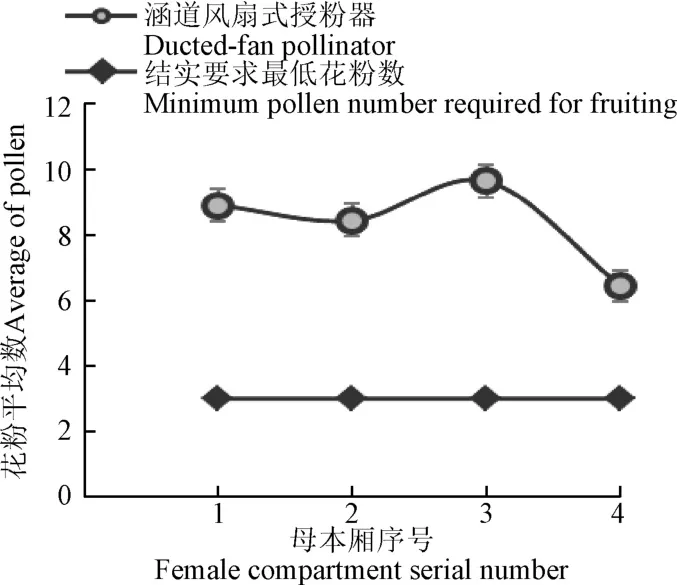
图10 涵道风扇式高地隙杂交水稻制种授粉机赶粉结果Fig.10 Pollination result of ducted-fan pollination machine based on high-clearance chassis for hybrid rice
由图10可知,涵道风扇式高地隙杂交水稻制种授粉机赶粉后各采集点的花粉结果显示,四厢母本上的单位视野内花粉平均粒数分别为:8.94、8.47、9.67和6.46粒,平均为8.39粒,第4厢母本花粉平均数最低,这主要是由于该厢母本与相邻父本间距较大、授粉期间无法避免的气象条件等所造成。此外,由于田间作业环境较为复杂,授粉机在赶粉过程中,对高差变化太大的地块桁架自动调平装置的响应速度较差,造成部分区域授粉效果略差。农用无人机赶粉后,花粉平均粒数为7.34粒。
根据易著虎等[28-29]的研究报道,母本稻穗花柱上要求至少有3粒花粉,方能满足杂交水稻结实的最低需求。涵道风扇式高地隙杂交水稻制种授粉机赶粉方法、农用无人机赶粉方法平均花粉数均在 3粒以上,两者授粉效果接近且均能满足杂交水稻制种母本结实要求。考查涵道风扇式高地隙杂交水稻制种授粉机与农用无人机 2种赶粉方式的结实率,由试验结果可知,采用农用无人机方式赶粉的平均结实率为42.7%,而采用自走式杂交水稻制种机方式赶粉的平均结实率为44.2%,均达到杂交水稻制种高结实率水平,2种机型赶粉所得效果相近。
4 结论与讨论
1)涵道风扇式授粉器外部气流速度流场的仿真与实测结果表明,当电机转速为9 000 rad/min时,气流速度分布均匀性较优,距离出风口 6.0 m处的平均风速达4 m/s,较好地满足了杂交水稻授粉时花粉扬起和悬浮运送的最低要求;此外,涵道对旋翼旋转后所形成的气流起到一定的环括作用,一定区域内起到了避免旋翼旋转后所形成的气流向四周扩散。
2)根据仿真试验得到的授粉器优选参数,进行了涵道风扇式高地隙杂交水稻制种授粉机样机的田间生产作业试验,试验结果表明,授粉后,镜检得到四厢母本上的花粉平均粒数为8.39粒(单位视野内)。同时安排了与农用无人机赶粉的实际生产作业对比试验,结果表明,2种授粉方式的结实率分别为44.2%、42.7%,两者作业效果相近,说明所设计的涵道风扇式高地隙杂交水稻制种授粉机能满足杂交水稻制种的实际生产需要。
由于所试制的涵道风扇式高地隙杂交水稻制种授粉机为水田作业,由于田间作业较为复杂,对高度差变化大的地方,桁架调平装置的响应速度较差,是作者下一步重点改进的方向之一。此外,高地隙动力底盘质量过大,长期在水田固定道上行走,易破坏泥底层而出现陷车风险。故对自走式杂交水稻授粉机的后续优化改进还需对桁架机构的平衡、车身轻量化设计等问题进行深入研究。