基于MATLAB/Simulink的二连杆机器人的PID控制与仿真
2019-06-17杨一丹
杨一丹

摘 要:主要研究了一类二连杆机器人应用PID控制理论进行轨迹追踪的控制方法。该文首先给出二连杆机器人进行动力学模型,进而利用MATLAB/Simulink仿真环境,构造出PID控制模型框图,使用Interpreted MATLAB Function嵌入代码。通过改变PID参数进行仿真,该文分析了不同PID参数对二连杆机器人关节转角误差的影响,使机器人末端实际轨迹实现了很好的跟踪效果。
关键词:二连杆机器人 Simulink PID控制
中图分类号:G64 文献标识码:A 文章编号:1672-3791(2019)03(a)-0030-02
二连杆机器人是可自由改变关节转角而完成不同作业的装置,对二连杆机器人的关节转角的准确控制关乎产品的质量和生产的效率,是工业生产关键的一环,因此应用PID控制算法对其转角的控制显得尤为重要。为减小二连杆机器人转角误差,于具有数值计算分析与数学建模功能的MATLAB/Simulink环境中应用PID控制理论模拟控制的全过程。
该文主要研究PID参数对二连杆机器人关节转角误差的影响,应用MATLAB中精确的矩阵等的运算和清晰的绘图功能,Simulink中简洁的模块联系和动态仿真曲线,得到了不同PID参数下的误差曲线。
该文依托PID控制理论,以二连杆机器人运动轨迹为研究对象,通过MATLAB编程和Simulink仿真,构造出合理的理论模型,通过分析得到不同PID參数对误差的影响,进而能够使二连杆机器人运动轨迹基本与期望值相同,转角误差降至最低,达到了控制的目的。
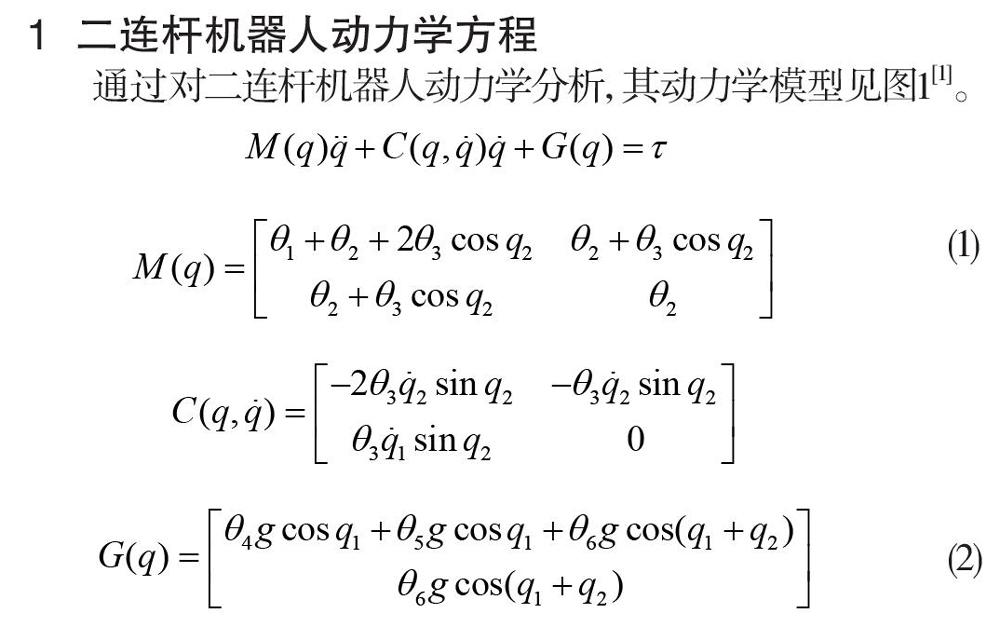
1 二连杆机器人动力学方程
通过对二连杆机器人动力学分析,其动力学模型见图1[1]。
2 PID控制及Simulink仿真模型
PID控制中的P(比例)、I(积分)、D(微分)参数对系统有不同的控制作用[2]。比例控制器成比例地反映控制系统的偏差信号,比例作用的放大倍数与被控参数的平稳性成反比关系,但比例控制器会产生余差。积分控制器的作用就是为了消除余差,积分时间与积分作用成反比,积分过程会因为偏差的存在而存在。微分作用的输出变化与时间和偏差变化的速度成正比,微分控制器能提高系统的稳定性,但微分控制作用过强时会使控制器输出明显的峰值,使控制系统产生明显的扰动[3]。
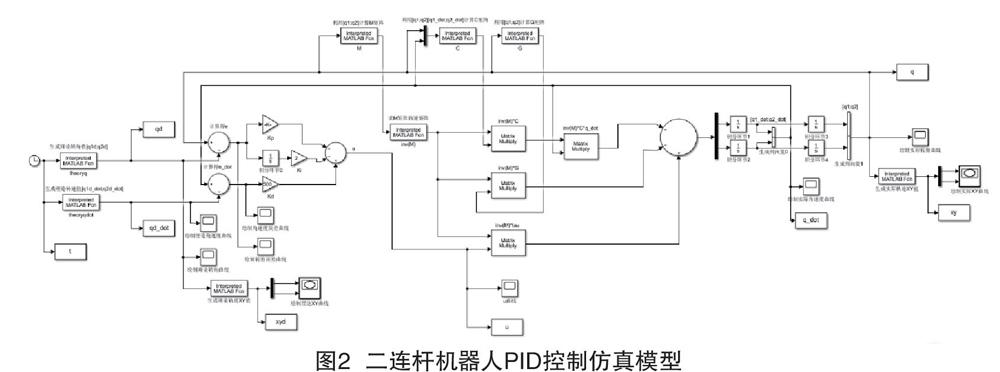
对二连杆机器人关节角度的控制分为3个部分,分别为误差的产生和PID控制,动力学公式恒等变形的处理以及理论与实际误差的比较。
误差的产生和PID控制部分:由theoryq函数和theoryqdot函数输入理论的二连杆关节的角度和角速度轨迹,理论值与实际值相减得到的误差经过PID控制器的比例,积分、微分环节后就得到了外界应输入的控制力矩。动力学公式恒等变形部分:根据二连杆机器人机械结构的具体参数,代入二连杆机器人运动学方程,应用加法器和求逆矩阵函数inv将公式恒等变形,得出二连杆的实际角加速度,再通过两次积分得出二连杆关节实际转角。理论与实际误差的比较部分:由第一部分关节转角误差曲线分析不同PID参数下的情况;由第二部分得到的关节实际运动轨迹和第一部分的理论运动轨迹做比较,得到运动轨迹的误差(见图2)。
3 仿真结果
当Kp增大时,系统响应速度加快,转角误差明显减小,误差波动更平缓,表明Kp能减少误差。当Ki增大时,增加了系统误差的超调量,误差稍有减小,但效果不很明显。当Kd增大时,减小了系统的超调量,转角误差减小。无论是何种情形,在一定误差允许范围内,实际运动轨迹与理论运动轨迹基本相同。总之,要综合考虑PID的影响,得出与拟定期望值相同的结果。
4 结语
通过使用MATLAB/Simulink,运用PID控制算法,建立了二连杆机器人的仿真控制程序。进行仿真实验,明确了每个PID参数对二连杆转角误差的影响,调和3个参数的影响,关注实际生产中的需要和要求,可以使实际运动轨迹基本与理论运动轨迹基本相同,解决了二连杆机器人在使用过程中需要精确控制的问题。编程的思想、对物理模型的数学构建以及将数学图表分析转化为物理意义的过程同样可应用于其他问题的研究。
参考文献
[1] 高道祥,薛定宇.基于MATLAB/Simulink机器人鲁棒自适应控制系统仿真研究[J].系统仿真学报,2006(7):2022-2025.
[2] 张建荣,罗国虎,郭金妹.基于模糊自适应与PID控制的六自由度工业机器人运动控制策略研究[J].科技视界,2018(30):5-6.
[3] 吴晗,薛磊,徐开芸,等.球形机器人双闭环PID控制设计与仿真[J].机电产品开发与创新,2018,31(4):82-84.
