大摆臂分流器在行李处理系统中的应用设计
2019-06-17蔡咏德高燕
蔡咏德 高燕

摘 要:大摆臂分流器作为行李处理系统的新型设备,在机场应用中非常罕见。它除了具有一般分流器的分流行李功能外,还具有行李跟踪等功能。该论文主要解决了大摆臂分流器在应用和升级改造中的难点问题。文中介绍了PLC控制系统的硬件网络配置,详细描述大摆臂分流器的特殊电气、程序设计、功能优化及结构化模块编程。改造后不仅满足了系统功能需求,并且提升了系统的稳定性和容错性。
关键词:行李处理系统(BHS) 大摆臂分流器 结构化模型 稳定性 容错性
中图分类号:V35 文献标识码:A 文章编号:1672-3791(2019)03(a)-0012-07
Abstract: As a new type of equipment for baggage handling system, big horizontal diverter is very rare in airport applications. It not only has the function of shunting luggage of general shunt, but also has the function of luggage tracking. This paper mainly solves the difficult problems in the application and upgrading of the big horizontal diverter in baggage handling system. This paper introduces the hardware network configuration of the PLC control system, and describes in detail the special electrical and program design, function optimization and structured module programming of the swing arm shunt. The transformation not only meets the functional requirements of the system, but also improves the stability and fault tolerance of the system.
Key Words: Baggage Handling System(BHS); Big horizontal diverter; Structure model; Stabilization; Redundancy
1 项目简介
1.1 背景介绍
上海浦东国际机场三大国际机场之一,与北京首都国际机场、香港国际机场并称中国三大国际航空港。上海浦东国际机场位于上海浦东长江入海口南岸的滨海地带。
浦东机场一期工程1997年10月全面开工,1999年9月建成通航。为满足上海地区航空业务量持续快速增长和建设上海航空枢纽的需要,上海国际机场股份有限公司(简称“上海机场”)决定投资12.23亿元建设上海浦东国际机场一号航站楼(T1)改造项目。根据浦东机场总体规划,T1航站楼将与S1卫星厅形成一体,年旅客处理量将达到3600万人次以上,因此必须对T1航站楼进行改造扩建。此次改造按浦东机场T1航站楼远期年旅客吞吐量3680万人次的运行能力设计,在不停航的情况下组织实施,涉及建筑流程改造工程和行李处理系统改造工程两大部分。
1.2 行李处理系统BHS
上海浦東机场T1行李系统主要包括16条行李出发线、2条再值机出发线、220个值机柜台、13条行李到达线、2套托盘式行李分拣机、6条中转线。
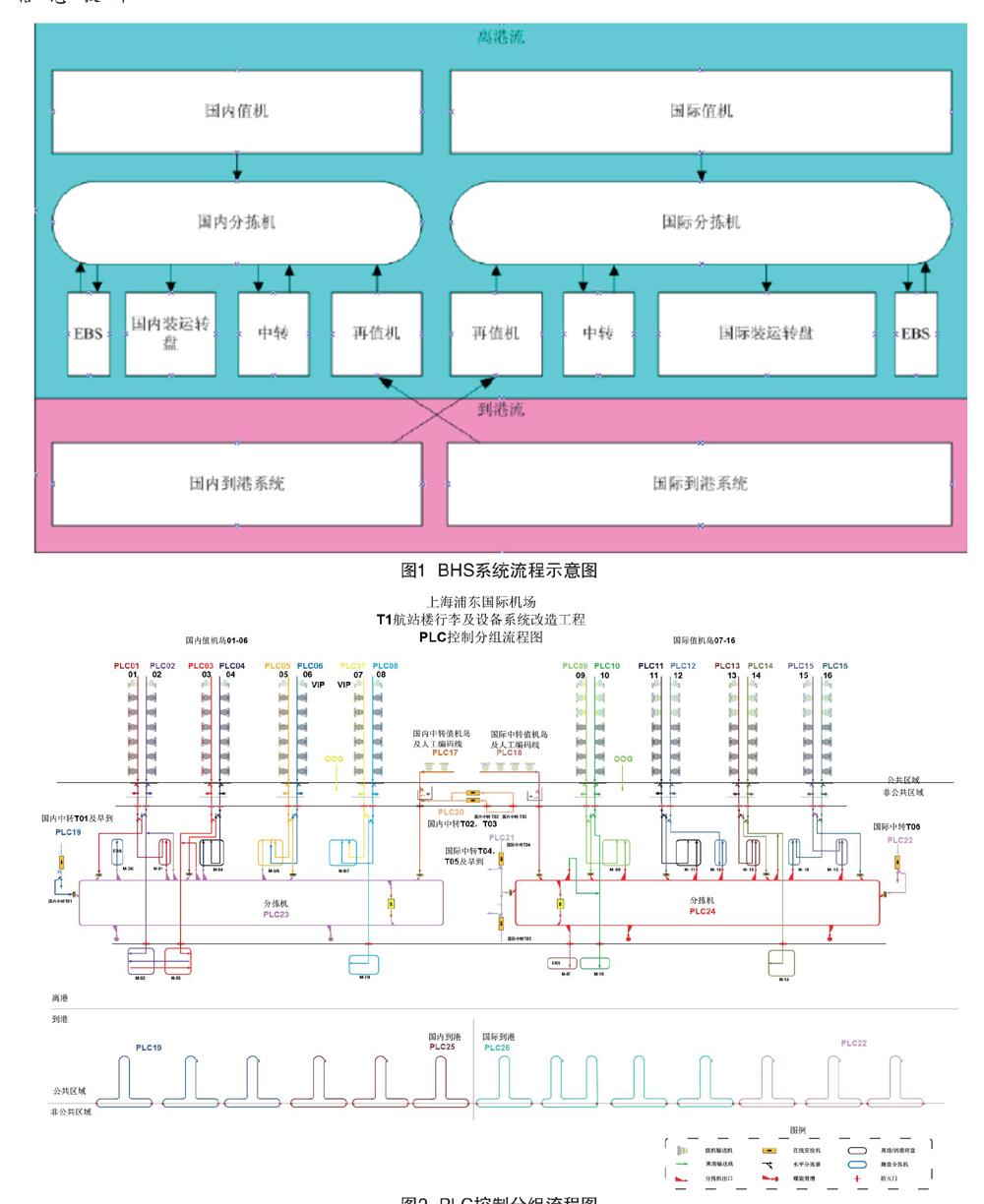
(1)流程概述。
行李处理系统基本解决方案中简化主要行李输送如图1所示[1]。系统主要分为两大行李流——国内及国际。国内及国际行李流仅通过到港系统交换行李,其后为再值机柜台。
(2)主要子系统。
整个行李处理系统可分为下列主要系统:始发系统、值机子系统、值机传送子系统、倾翻式托盘分拣系统、人工编码子系统、中转与再值机行李处理系统、超大行李子系统、到达行李处理系统。
(3)控制系统。
通过采用计算机、可编程逻辑控制器(PLC)及机电硬件的全面集成系统,来完成行李处理系统(BHS)的整体运行与控制。
计算机用于数据处理、通信及操作员连接。采用机电控制与可编程控制器来完成设备层的控制。
整个子系统输送机基于“反向级联”概念工作。这意味着下游输送机应在上游输送机启动之前运行。在自动运行模式中,从分拣机到传送线的整个系统按顺序启动或停止。因此,在下游输送机停止时,上游输送机也会停止,将在“反向级联”模式中向回传送状态信息。
控制系统管理着行李处理系统中所有输送及数据管理运行的全面协调。控制系统是运行的核心,包括控制整个行李处理系统输送机及分拣机系统与整个机场系统连接必要的所有系统部件、线路及软件。
2 控制系统构成
(1)上海浦东国际机场T1航站楼行李系统改造工程是在充分考虑运营和维护需求的基础上,集成SCADA和安全系统。
系统被划分成许多的PLC 区域分组,每一个分组都是独立于其他的分组控制,它有独立的控制指令。当其中一个分组需要维护或者关闭,不会影响到其他分组的运行。每一个分组的控制都可以通过SCADA或者操作面板发送指令来控制。
PLC控制系统总共被分为24个分组。分为值机线(1~16),中转线及人工编码(17~22)和到港(25,26)。
详细的分组如图2所示。
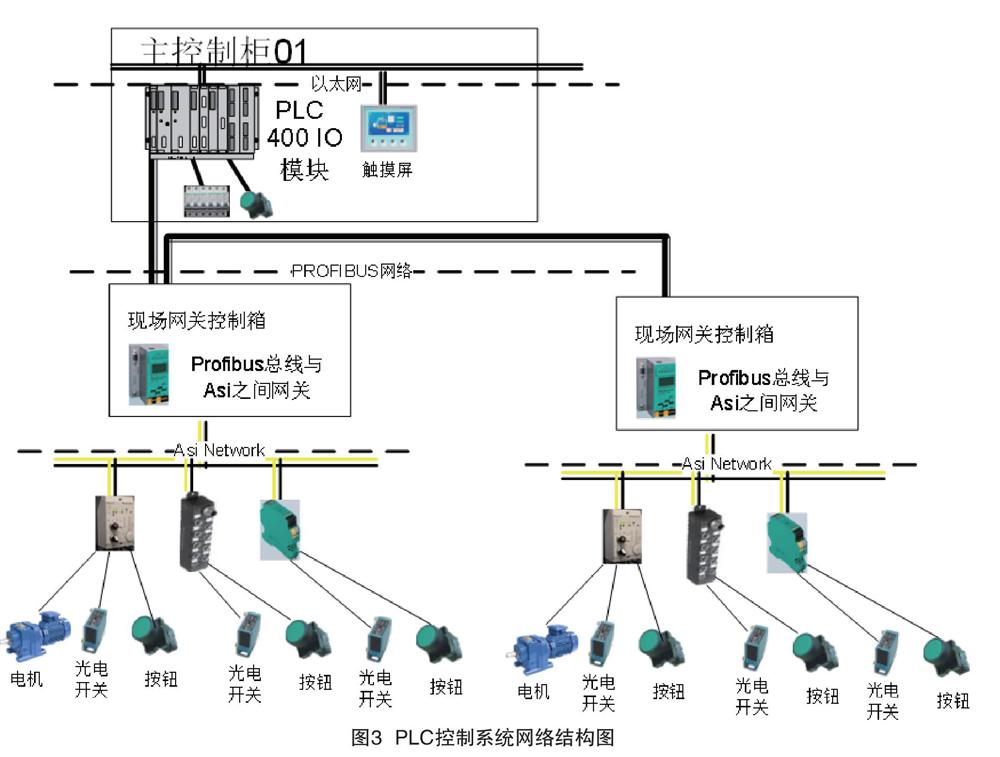
(2)分组PLC控制系统架构。
每个分组PLC控制系统采用西门子PLC S7-400系列[2],因为设备离控制柜较远,现场的IO都通过总线的方式与控制柜内CPU连接。
PLC控制系统网络结构图如图3所示。
3 大摆臂分流器功能及实现
浦东国际机场一号航站楼采用三级安检流程,值机后的行李进入双通道安检系统,安检信息系统与行李输送系统相互配合分拣可疑行李至行李开检位置。安检安全的行李被输送至行李分拣大厅。根据系统资源分配,选择将行李分拣至转盘人工分拣,或者选择传送至分拣机自动分拣。该路径选择功能通过在SCADA上切换大摆臂分流器方向实现。
其中大摆臂分流器的改造为系统升级改造中的关键设备之一。该设备的改造提升系统的容错性,并且确保行李输送路径能够稳定输送至分拣系统。改造大摆臂分流器是此次改造项目中最为特点的亮点:大摆臂分流器设备为大型设备(见图4现场大摆臂分流器实物照片)单个设备长度达6米m,宽2.4m。此类大型设备在其他机场行李处理系统和物流系统中非常罕见。实际运行时分流器上可能会有多个行李,因此大摆臂分流器具有一般分流器的分流行李功能外,必须还具有行李跟踪功能,以便及时发现行李位移、堵塞现象。遇上两个大摆臂分流器相邻连续使用情况,两路行李同时在输送机上传输,跟踪功能必不可少。由于设备局限,无法安装编码器,只能采用软件计算方式,下文详细阐述解决方案。
3.1 大摆臂机械结构及电气设计(硬件)
大摆臂分流器的电气和控制属于此次改造。大摆臂分流器的基本结构如图5所示,其中PEC为对射式光电传感器。摆臂输送机位置有3台电机控制分别是SWS、VB和TRS,SWS控制摆臂的摆进和摆出,VB控制摆臂上皮带运行,TRS控制摆臂下方的输送机运行,其中TRS速度要等于VB速度的水平方向分速度。行李在摆臂摆出状态下输送,不会因为速度不同步而产生位移。摆臂通过限位开关检测是否切换到位。
当摆臂在里面的情况,Section01简称S1传输过来的行李会传输到S3;S2传输至大摆臂的行李会传输到S4。大摆臂下面的输送机成为S0。当摆臂切换到外侧的时候,S1和S2的行李将汇流传递至S3。
因此,行李1在两端输送机交接的位置,如果S3状态是可以接收行李的,而S4是不能接收行李的。则对于S0来说,也是不能向下游继续传输行李的。因为对于光电开关来说,系统是不能区分出行李是在输送机内侧还是外侧输送,系统都是认为在大摆臂分流器上。如图5来说,程序认为大摆臂分流器的下游也是不能接收行李的,从而导致系统停止,系统的容错能力降低。同时为了避免在S1→S2和S2→S4同时运行的时候,由于共用光电开关而导致的摆臂下方输送机的频繁启动和停止,将末端的光电开关进行了改造,如图6所示,改造后系统能区分出行李是在内侧还是在外侧输送,提高了体统的容错能力。
3.2 模块化设计大摆臂分流器功能(软件)
该项目采用西门子S7-416-2DP作为控制主站。西门子STL语言具有语言精练,执行效率高,并且编程灵活等特点[3]。该项目充分结合STL语言的特点,建立大摆臂分流器的各项功能模型,并将各功能块之间的接口相互联系,实现整个大摆臂分流器的控制功能。
从图7大摆臂分流器输送机功能模块关系图中看出跟踪模块、位置信息、速度最为关键。行李会在大摆臂上平行输送,为精确行李在输送机上的位置,需要建立两个不同输送过程。因此在共同的输送机速度模块的基础上,建立两个平行运行的跟踪模型。
程序是在OB1中运行,CPU的最小扫描周期为OB的扫描周期[4],系统默认扫描周期变量#OB_PREV_CYCLE为程序執行提供最小的采样周期△t(k)(程序执行的时候,扫描周期是在动态变化),其中k为从系统启动之后的扫描周期序列,根据设定的速度换算成扫描周期相同时间单位速度,得到每一个扫描周期输送机运行的距离△s(k):
减速过程:速度从稳态速度逐渐减速至0,结合光电开关位置可以测量得到减速距离Sdec,根据公式可以得知,其中V为稳态速度。在得知减速时间之后,假设减速过程为线性变化过程即减速度为恒定值,则adec=V/tdec。
当恒定减速度的条件下,减速过程的数学模型为:v(k)=V-adec×△t(k-1)。因此在减速过程中每一个扫描周期输送机运行距离为:
西门子STEP7编程软件中STL提供了丰富数学运算指令,以实现上述数学模型的运算[5]。
速度模块的运算为跟踪模块提供了速度信息[6],因此在程序中定义了两个相同结构的数据块,数据块的结构分为两部分,第一部分为输送机的状态信息,主要包括速度运算值、输送机运行状态、在输送机上的行李数量等;第二部分为输送机上的行李的位置跟踪信息。
跟踪信息的定义方式如下:首先定义一个数据结构,结构的内容如下。
位置信息:Position:INT;行李在输送机上的位置,以起始位置作为0点。
物理信息:Infor_Phyisical:INT;行李的物理信息,主要是行李的头尾信息,主要是通过光电开关检测得到。
数据信息:Link:INT;数据信息主要表示行李可能包括的信息,主要是行李条码信息。
基于上述数据结构定义N个数组。N大于输送机上所能存放的最大行李数的2倍。
当输送机上的检测元器件(光电开关)检测到行李经过输送机上的某一位置,则会在该位置写入物理信息,然后位置信息就会根据速度值不断更新。位置更新,主要采用西门子指针运算[7],具体的程序如下:
经过不断调试,根据上述数学模型编写的程序能精确描述行李在大摆臂分流器上传送过程,跟踪数据块中的位置信息和物理信息为数据块中的其他状态变量判断提供准确的逻辑条件判断,比如:输送机当前是否运行在稳态速度,行李是否在大摆臂分流器与输送机之间传递。
将该模型复用于图4~图6中的每一个输送机,跟踪数据块作为每一节输送机的背景状态数据块,并基于行李输送路径建立输送机背景跟踪数据块之间的链路关系。通过这种链路关系能够实现更加复杂功能,主要包括:S2经过大摆臂传递至S3输送机的分流功能;S1和S2同时导入的合流功能等。这些复杂功能使得BHS系统路径选择功能得以实现。
该项目从模型建立至编程语言的实现,充分证明西门子STL语言具有系统数学模型可程序化性能,并为后续类似项目提供了參考范本。
4 项目运行
2016年年初上海浦东机场1号航站楼行李处理系统改造完毕,已通过第三方和行业验收。目前系统运行情况良好,准备迎接6月份上海迪士尼乐园开业时大客流考验。
5 应用体会
该项目是在确保航站楼不停航的前提下进行施工。软件开发以完善的技术文档为支撑,紧密结合西门子STL语言的特点,构建良好的软件架构,使得开发的功能块具有很好的复用性,降低程序编写的成本,并使得系统具有很好的可维护性。STL程序执行效率高,并能实现复杂运算过程,灵活多样;做出来的块具有很好的复用性。
参考文献
[1] Brian Edwards.The Modern Airport Terminal[M].London:Francis e-Library,2005.
[2] Yu Huiqun,Xu Chunmei.Design and Implementaion of the Key Technologies for Baggage Handling Control System[A].International Conference on Measuring Technology and Mechatronics Automation[C].IEEE,2010:958-961.
[3] S7-400产品目录ST70_3C[Z].
[4] SIEMENS工业通讯产品目录IKPI2011[Z].
[5] S7-400指令列表 CPU 412、414、416、417[Z].
[6] SIMATIC用STEP7编程手册[Z].
[7] 刘华波,何文雪,王雪.西门子S7-300/400PLC编程与应用[M].北京:机械工业出版社,2010.
