从新松看工业机器人关键技术
2019-06-11王金涛
王金涛
工业机器人是当前先进制造技术的典型代表,在制造业中拥有巨大的发挥空间,并持续带动社会生产水平的提高。工业机器人作为推动制造变革的催化剂,该领域的新产品和新技术研发持续引发社会关注。本文将以新松工业机器人为例,着重分析探讨工业机器人若干关键技术要点。
工业机器人被重新定义
如今机器人的发展进入了全新的R2.0时代,并被赋予了新的概念(是一种具备感知能力、规划能力、动作能力和协同能力,具有高度灵活性的自动化机器)。机器人正成为各行各业、各工艺工序的作业专家能手,以新松为例,其工业机器人成熟具备了焊接、磨抛、喷涂、装配、搬码、上下料等工艺包与专家系统,广泛服务于汽车、航空航天、船舶制造、电子电气、食品医疗等领域。
对比五年前的传统机器人,现在的工业机器人已经打破了技术壁垒,成为一种具有自感知、自决策、自执行的智能生产工具。一是自感知功能,以用户个性化定制为主线,通过视觉或力控技术帮助机器人作业,采用力位混合的柔性控制技术等,都是在传统的工业机器人上外加各类智能传感器辅助、实现信息的感知与融合,从而指导下一步工作。二是自决策功能,使用各种工艺专家数据库来共享经验知识,将机器人与工业物联网的系统融合构建MES,以智能互联为基础,实现智能控制、决策及交互。三是自执行功能,以全流程整合为方法,建立智能化生产机制,通常会配套智能离线编程软件来实现免示教作业及柔性路径的自主规划,实现快速编程与自编程,快速就位与换产等,同时重视操作性和实用化,达到智能生产的目的。
新松工业机器人关键技术
工业机器人是集计算机、机械、电子、控制等诸多学科于一体的自动化设备,具有较高的技术附加价值,接下来就新松工业机器人的几项关键技术展开介绍。
一、新松工业机器人核心控制技术
1.网络化控制器
随着机器人的工程应用越来越多,机器人控制器的联网技术变得越来越重要。首先,控制器需要支持更多的协议扩展与通信接口,具备各类现场总线及工业以太网的联网功能,实现机机融合,便于对生产环节进行监管及优化。其次,为更好地解决机器人复杂作业中指令过多的问题,提高作业存储的安全性,控制器的存储形式向多元化发展,存储容量也顺势得到了显著提升,实现了机器人作业和指令的海量安全存储。
2.路径控制技术
(1)连续轨迹规划技术
机器人位置控制分为点位式和轨迹式两种方式。连续轨迹算法一直是工业机器人轨迹规划技术的重要组成部分,是性能优化的关键体现。新松工业機器人通过对位置给定信号按照优化的时间间隔进行速度合成与插值计算,建立优化路径控制的目标函数,从而实现连续轨迹控制。连续轨迹规划技术保证了机器人运动轨迹的圆滑过渡,提高过渡区域的速度,减少过渡所需时间,充分发挥工业机器人的能力。
(2)振动抑制技术
柔性化是工业机器人的发展趋势之一。工业机器人运动结束之后由于关节柔性和连杆柔性,将引起机械臂的残余振动,通用方法是采用伺服驱动器的减振滤波功能,实现振动抑制效果。但该方法会导致跟踪差增大,机器人轨迹精度变差。新松工业机器人创新的振动抑制技术基于轨迹规划抑振,从根源上解决机械臂残余振动问题,从而克服了通过驱动器减振滤波方式导致轨迹精度变差的缺陷,同时也加强了机器人运动终止时的精确定位。
3.动力学补偿技术
工业机器人动力学研究的是关节力、力矩与关节运动的关系,主要目的是通过动力学模型来计算出工业机器人各关节在进行目标运动时各关节驱动器所应提供的力矩大小,并将这一力矩值用于机器人控制。通过动力学补偿技术,来解决机器人碰撞保护、上电瞬间抖动、负载辨识、轨迹精度等关键问题。
(1)碰撞保护技术
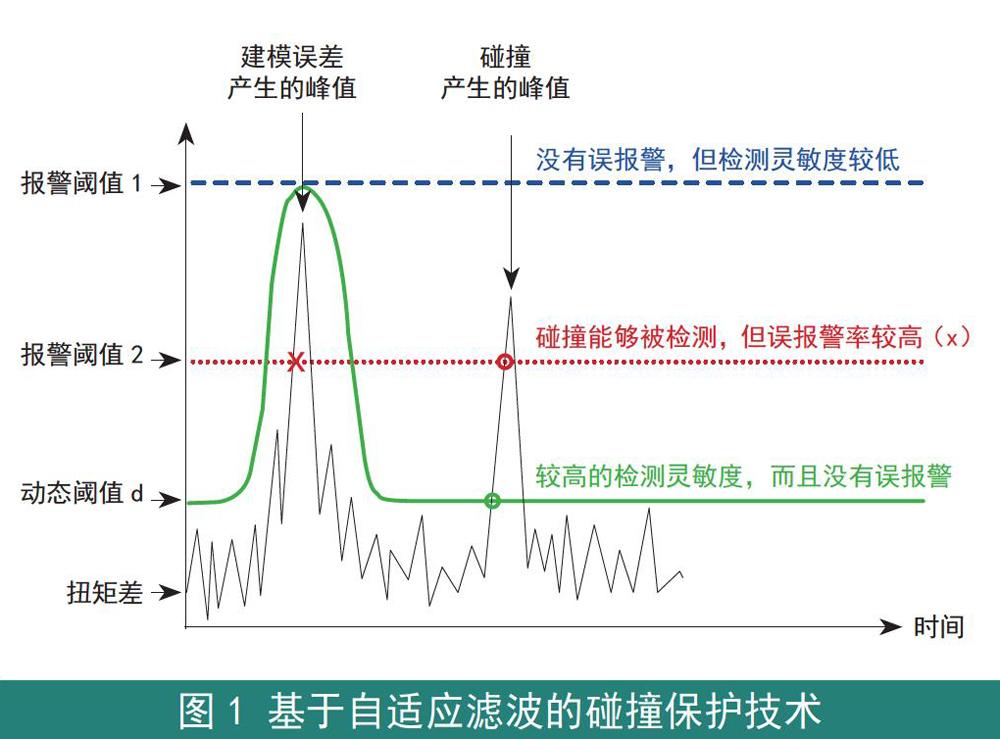
碰撞保护是通过相应的控制策略,避免机器人与障碍物产生碰撞而提高其安全系数的机器人智能安全保护方法。大多数检测碰撞或碰撞力都是通过添加外部传感器实现。考虑到工业机器人的实际工作情况和性能要求,新松工业机器人采用机器人自身电机的电流反馈力矩的形式来检测碰撞,无需额外添加传感器,检测范围能够覆盖机器人的整个表面。同时设计并应用了基于自适应滤波算法,对报警阀值自动调整,有效提高碰撞检测的灵敏度,降低设备的误报警率。
(2)扭矩前馈控制技术
扭矩前馈控制技术主要针对大负载工况下机器人关节的刚度参数辨识问题进行误差补偿。通过动力学计算出机器人在某一姿态、某一速度下所需的扭矩变化,并将其加算到电流环的输入环节,使得扭矩输出可以快速地实现稳态调整,减少偏差,达到预期控制效果。通过扭矩前馈控制技术有效地解决了工业机器人(尤其大负载机器人)上电瞬间由于重力影响出现的瞬间“下垂”抖动;改善了传统位置模式控制方式下,机器人不同负载、不同速度轨迹精度不一致问题。实际应用中拖拽示教、软浮动功能也是基于该技术进行的扩展及优化。
(3)负载辨识技术
负载的动力学模型是机器人系统动力学模型的重要部分。机器人柔性化程度的提高以及定制化生产不断完善,工业机器人负载辨识技术应运而生。工业机器人在同一作业过程中由于末端负载变化,往往会导致机械振动而影响精度,负载的动力学参数一般不能直接得到,也会影响建模精度,因此需要识别机器人末端负载去调整相应的控制参数来保证其具有良好的运动表现。新松工业机器人负载辨识技术是一种无需外接设备,基于伺服电机输出力矩,通过末端辨识自动计算负载的动力学参数的方法。
(4)刚度补偿技术
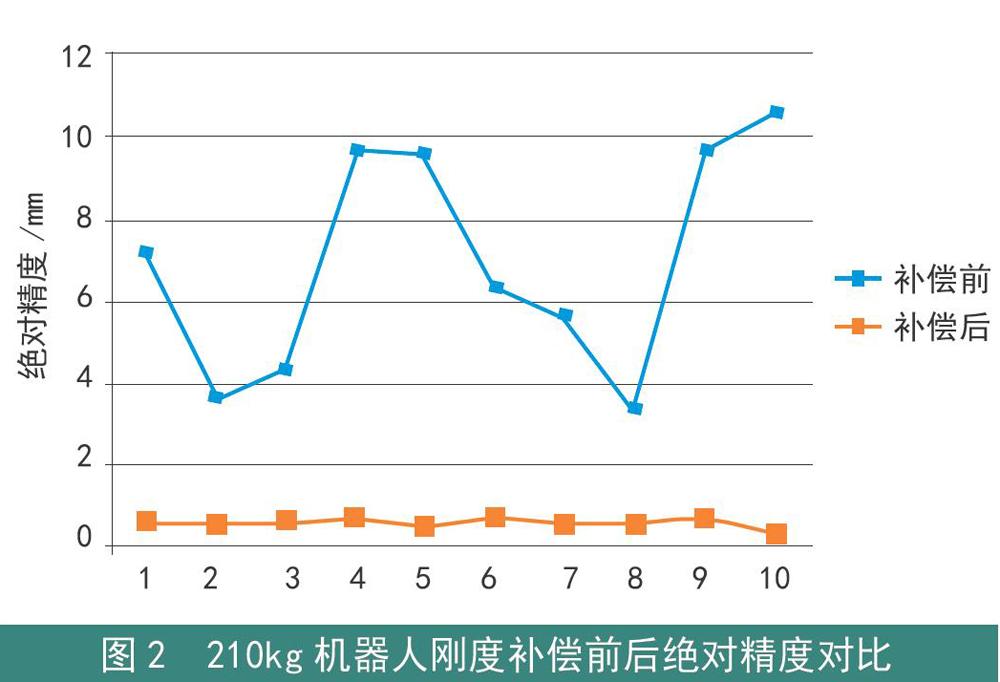
工业机器人控制中需要考虑弹性变形的作用,变形主要来源于关节和连杆。为精确辨识工业机器人的关节刚度参数,新松工业机器人以动力学为基础,结合机器人柔度矩阵,使用了刚度补偿技术,很大程度上提升了机器人的绝对精度和轨迹精度。以新松210kg机器人为例,测试的绝对精度在刚度补偿后效果平稳。
