基于复合PI控制器的永磁伺服电机电流控制
2019-06-11崔业兵左月飞桂亮朱孝勇曾凡铨
崔业兵 左月飞 桂亮 朱孝勇 曾凡铨
摘 要:在永磁电机伺服系统中,电流环PI控制器通常基于零极点对消的方式设计得到,这会限制系统动态性能的提升。针对这一问题,首先通过传递函数分析说明传统电流环PI控制器存在的问题,然后基于状态方程设计电流环复合PI控制器。通过传递函数进行对比,从理论上说明电流复合PI控制器比传统电流PI控制器具有更好的抗扰性能,并给出相应的约束条件。最后,通过实验对比电流阶跃响应和跟踪正弦给定响应。实验结果表明,采用复合PI控制器的电流控制系统对正弦给定的跟踪误差更小,电流阶跃响应也更快,即电流复合PI控制系统具有更好的跟踪性能和抗扰性能,证明了所提方法的有效性。
关键词:永磁伺服电机;电流环;PI;零极点对消;抗扰
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2019)04-0105-06
0 引 言
永磁同步电动机(permanent magnetic synchronous motor,PMSM)以其高功率/重量比、高转矩/惯量比、高效率等优点被广泛应用于工业伺服系统中。矢量控制通过坐标变化将复杂的交流电机控制问题转化成简单的直流电机控制问题,具有较好的控制性能,在伺服系统中得到了广泛的应用。电流环作为PMSM伺服系统的最内环,其控制效果对整个系统的控制性能而言至关重要[1]。近年来,随着现代控制理论和数字信号处理器的快速发展,很多现代控制理论中的算法能够得以实现,并取得了很好的控制效果。但是考虑到实际系统的全局稳定性和鲁棒性,工业应用中的绝大多数控制器仍然是PI控制器[2-3]。
传统的伺服系统电流环PI控制器通常根据零极点对消的原则来设计参数[4-8]。采用零极点对消的方法设计得到的电流闭环系统对给定表现为一阶惯性系统,对扰动则表现为一个二阶系统,且二阶系统的其中一个极点由电机参数决定,另一个极点由比例系数决定。一定程度上增大比例系数可以提高系统带宽,加快系统响应,但随着比例系数的进一步增大,由电机参数决定的极点会变为主导极点,导致系统的抗扰性能不再明显提高。
文献[9]采用基于状态方程的设计方法,通过状态反馈将系统校正为纯积分系统,然后采用PI控制器使系统对输入和扰动均表现为二阶系统,通过改变控制器的比例系数和积分系数来任意配置系统的两个极点,使得电机性能不受制于电机参数。不过复合PI控制系统的阶跃响应存在超调,文献[10]提出一种变结构复合PI控制器,既可以对连续变化输入具有很好的跟踪性能,同时实现了阶跃响应无超调。不过,该控制器需要使用输入微分前馈,这会使得系统噪声较大。
本文将复合PI控制器的设计方法用于电流环的设计,并分析比较了复合PI控制系统与传统PI控制系统的性能。最后在dSPACE的DS1103系统平台上通过实验验证所提方法的正确性和实用性。
1 传统的电流环PI控制器
1.1 PMSM的数学模型
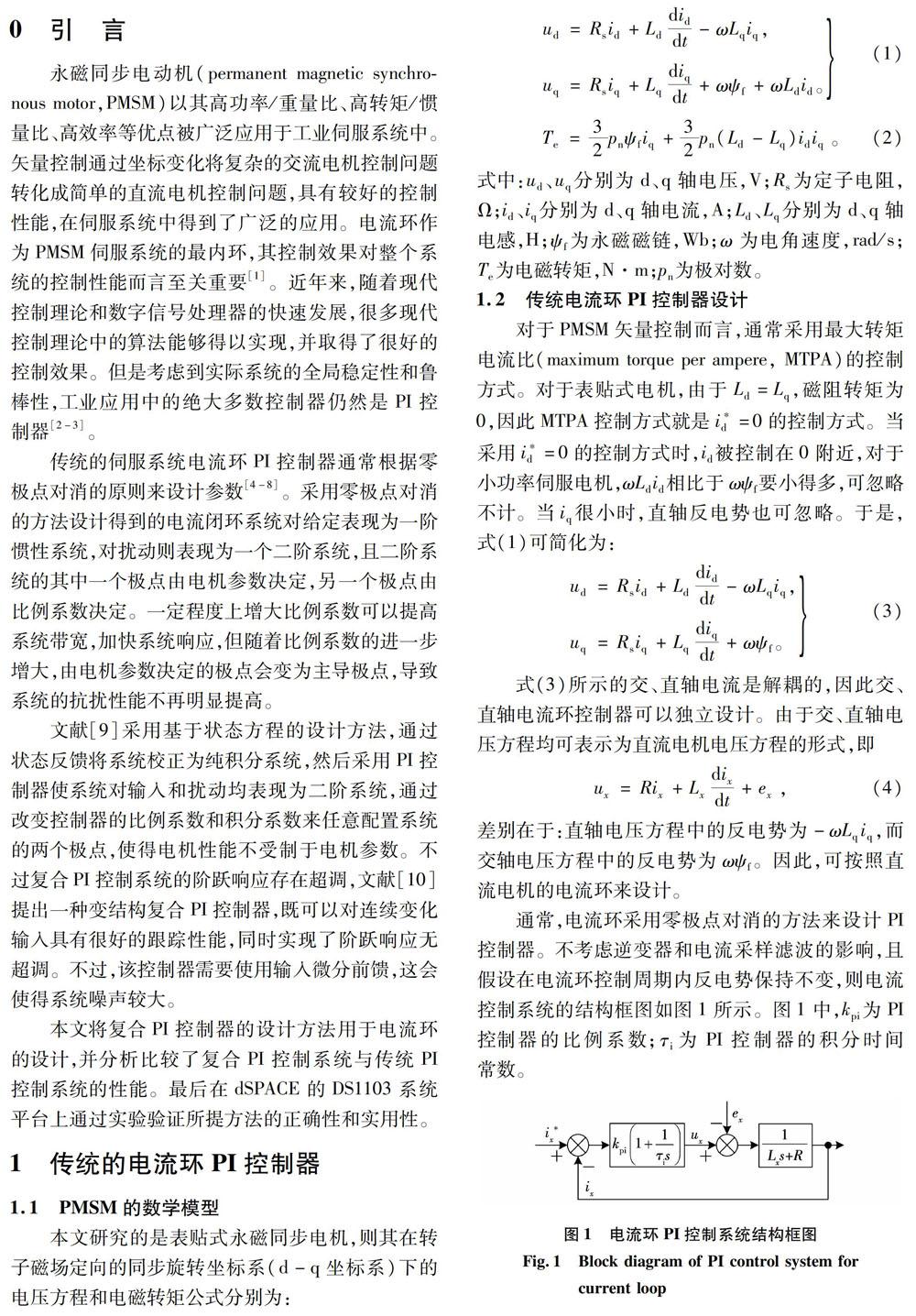
本文研究的是表贴式永磁同步电机,则其在转子磁场定向的同步旋转坐标系(d-q坐标系)下的电压方程和电磁转矩公式分别为:
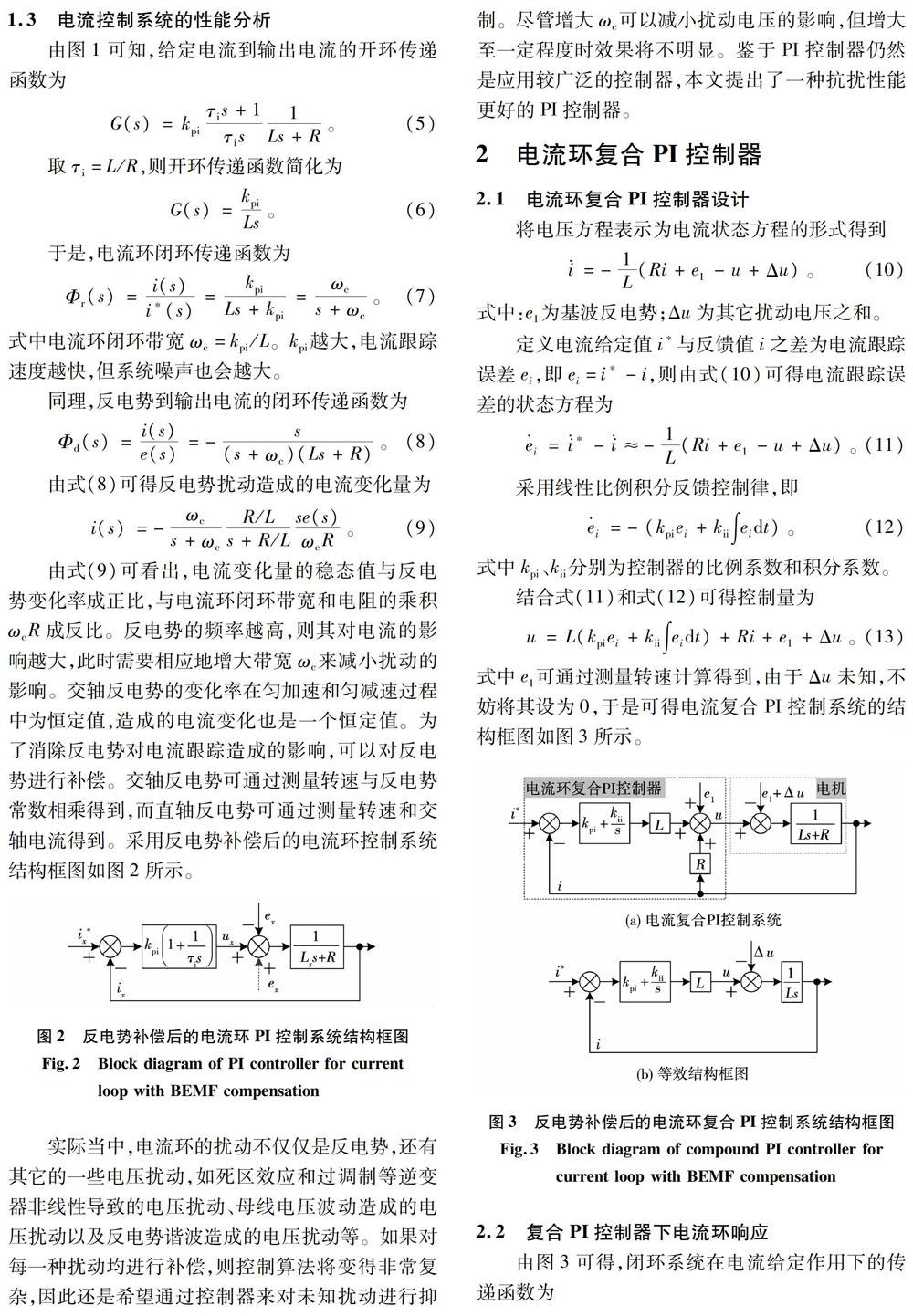
由式(9)可看出,电流变化量的稳态值与反电势变化率成正比,与电流环闭环带宽和电阻的乘积ωcR成反比。反电势的频率越高,则其对电流的影响越大,此时需要相应地增大带宽ωc来减小扰动的影响。交轴反电势的变化率在匀加速和匀减速过程中为恒定值,造成的电流变化也是一个恒定值。为了消除反电势对电流跟踪造成的影响,可以对反电势进行补偿。交轴反电势可通过测量转速与反电势常数相乘得到,而直轴反电势可通过测量转速和交轴电流得到。采用反电势补偿后的电流环控制系统结构框图如图2所示。
实际当中,电流环的扰动不仅仅是反电势,还有其它的一些电压扰动,如死区效应和过调制等逆变器非线性导致的电压扰动、母线电压波动造成的电压扰动以及反电势谐波造成的电压扰动等。如果对每一种扰动均进行补偿,则控制算法将变得非常复杂,因此还是希望通过控制器来对未知扰动进行抑制。尽管增大ωc可以减小扰动电压的影响,但增大至一定程度时效果将不明显。鉴于PI控制器仍然是应用较广泛的控制器,本文提出了一种抗扰性能更好的PI控制器。
2 电流环复合PI控制器
2.1 电流环复合PI控制器设计
将电压方程表示为电流状态方程的形式得到
由式(16)可看出,电流变化量的稳态值与扰动电压的变化率成正比,与乘积kiiL成反比。
2.3 两种控制系统下性能对比
综上,电流环传统PI控制系统与复合PI控制系统的传递函数如表1所示。
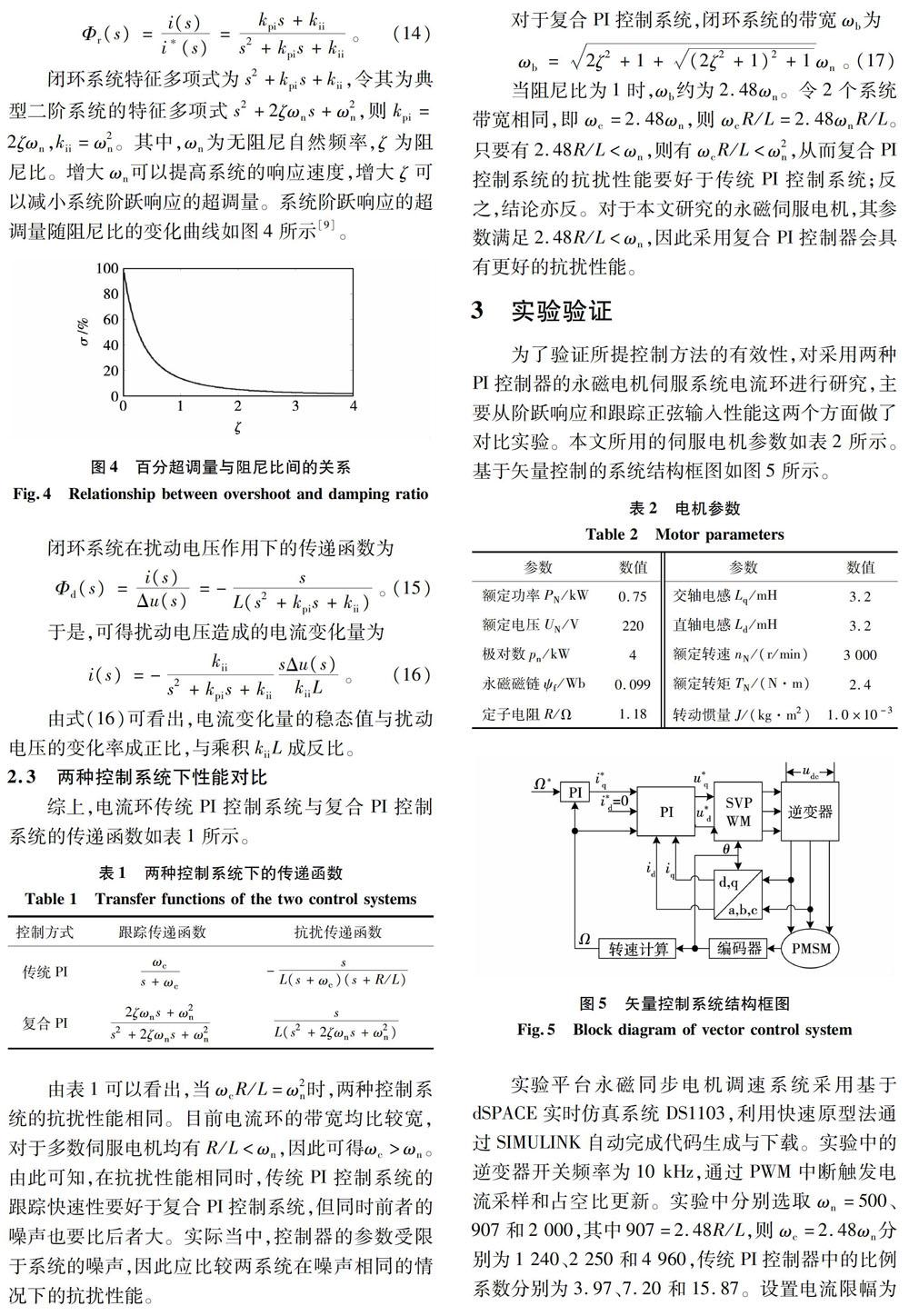
由表1可以看出,当ωcR/L=ω2n时,两种控制系统的抗扰性能相同。目前电流环的带宽均比较宽,对于多数伺服电机均有R/L<ωn,因此可得ωc>ωn。由此可知,在抗擾性能相同时,传统PI控制系统的跟踪快速性要好于复合PI控制系统,但同时前者的噪声也要比后者大。实际当中,控制器的参数受限于系统的噪声,因此应比较两系统在噪声相同的情况下的抗扰性能。
对于复合PI控制系统,闭环系统的带宽ωb为
当阻尼比为1时,ωb约为2.48ωn。令2个系统带宽相同,即ωc=2.48ωn,则ωcR/L=2.48ωnR/L。只要有2.48R/L<ωn,则有ωcR/L<ω2n,从而复合PI控制系统的抗扰性能要好于传统PI控制系统;反之,结论亦反。对于本文研究的永磁伺服电机,其参数满足2.48R/L<ωn,因此采用复合PI控制器会具有更好的抗扰性能。
3 实验验证
为了验证所提控制方法的有效性,对采用两种PI控制器的永磁电机伺服系统电流环进行研究,主要从阶跃响应和跟踪正弦输入性能这两个方面做了对比实验。本文所用的伺服电机参数如表2所示。基于矢量控制的系统结构框图如图5所示。
实验平台永磁同步电机调速系统采用基于dSPACE实时仿真系统DS1103,利用快速原型法通过SIMULINK自动完成代码生成与下载。实验中的逆变器开关频率为10 kHz,通过PWM中断触发电流采样和占空比更新。实验中分别选取ωn=500、907和2 000,其中907=2.48R/L,则ωc=2.48ωn分别为1 240、2 250和4 960,传统PI控制器中的比例系数分别为3.97、7.20和15.87。设置电流限幅为9 A。系统的硬件结构框图和实验平台分别如图6和图7所示。
3.1 两种电流PI控制系统的正弦响应比较
给定幅值为500 r/min、频率为5 Hz的正弦转速,不同ωn下的两种控制系统的电流正弦响应如图8所示。由图8(a)可以看出,ωn<2.48R/L时,采用传统PI控制器的系统其电流跟踪误差要比复合PI控制系统小,即此时传统PI控制器的抗扰效果更好;由图8(b)可以看出,当ωn=2.48R/L时,复合PI控制系统的电流跟踪误差更小一些。理论上,此时两种控制系统的抗扰性能相同,但是复合PI控制系统具有更好的跟踪性能;同理,由图8(c)可知,当ωn>2.48R/L时,复合PI控制系统的抗扰性能要好于传统PI控制系统。两种控制系统下的电流跟踪误差见表3,表中结果验证了理论分析的正确性。
3.2 两种电流PI控制系统的阶跃响应比较
给定阶跃转速,不同ωn下的两控制系统的电流阶跃响应如图9所示。可以看出,传统PI控制系统下的电流阶跃响应并不是理想的指数响应,反馈值在到达给定值之前会存在凹陷,这是由实际系统中的死区效应造成的。图9(b)中,2.48R/L=ωn,复合PI控制的阶跃响应存在超调,而传统PI控制系统的阶跃响应存在凹陷,从电流下降的动态过程中可以看出此时的复合PI控制器具有更好的跟踪性能。对于图9(a),理论上传统PI控制系统要比复合PI控制系统具有更好的抗扰性能,但由于复合PI控制系统具有更好的跟踪性能,因此本应出现的阶跃响应超调在死区扰动的作用下消失了。从图9(c)可以看出,当ωn=2 000时,两系统的跟踪速度均较快,此时系统中的小惯性环节起作用,导致了电流阶跃响应产生振荡。尽管如此,仍然可以看出复合PI控制系统具有更好的跟踪和抗扰性能。以上结果验证了理论分析的正确性。
4 结 论
针对基于零极点对消的传统电流PI控制器存在抗扰性能难以增强的问题,本文提出了一种基于复合PI控制器的电流控制方案。电流环复合PI控制器通过将电阻压降和反电势补偿使系统变为一个纯积分系统,然后通过比例积分作用来任意配置系统的极点,使系统性能不再受限于电机参数。理论分析和实验结果表明,基于复合PI控制器的电流控制系统具有更好的跟踪性能和抗扰性能。
电流环的扰动主要有母线电压波动、反电势扰动、死区效应产生的电压扰动以及电阻、电感等参数变化产生的扰动等,很难对每一个扰动都进行补偿,导致系统的扰动始终存在,因此也很难单独衡量不同控制器下的系统跟踪性能。另外,这些扰动也很难从外部改变,因此也很难单独衡量不同控制器下的系统抗扰性能。电流环分析时要综合考虑系统的跟踪性能和抗扰性能。
参 考 文 献:
[1]王恩德, 黄声华. 表贴式永磁同步电机伺服系统电流环设计[J]. 中国电机工程学报, 2012, 32(33): 82.
WANG Ende, HUANG Shenghua.Current regulator design for surface permanent magnet synchronous motor servo systems [J]. Proceedings of the CSEE, 2012, 32(33): 82.
[2]周华伟, 温旭辉, 赵峰, 等. 基于内模的永磁同步电机滑模电流解耦控制[J]. 中国电机工程学报, 2012, 32(15): 91.
ZHOU Huawei, WEN Xuhui, ZHAO Feng, et al. Decoupled current control of permanent magnet synchronous motors drives with sliding mode control strategy based on internal model[J]. Proceedings of the CSEE, 2012, 32(15): 91.
[3]吴荒原, 王双红, 辜承林, 等. 内嵌式永磁同步电机改进型解耦控制[J]. 电工技术学报, 2015, 30(1): 30.
WU Huangyuan, WANG Shuanghong, GU Chenglin, et al. An improved decoupling control strategy for the IPMSMS [J]. Transactions of China Electrotechnical Society, 2015, 30(1):30.
[4]王恩德, 黃声华. 三相电压型PWM整流的新型双闭环控制策略[J]. 中国电机工程学报, 2012,32(15):24.
WANG Ende, HUANG Shenghua. A novel double closed loops control of the three-phase voltage-sourced PWM rectifier[J]. Proceedings of the CSEE, 2012, 32(15): 24.
[5]BRIZ F, DEGNER M W, LORENZ R D. Dynamic analysis of current regulators for AC motors using complex vectors [J]. IEEE Transactions on Industry Applications,1999,35(6):1424.
[6]BRIZ F, DEGNER M W, LORENZ R D. Analysis and design of current regulators using complex vectors[J]. IEEE Transactions on Industry Applications,2000,36(3):817.
[7]肖启明,杨明,刘可述,等. PMSM伺服系统速度环PI控制器参数自整定及优化[J]. 电机与控制学报,2014,18(2):102.
XIAO Qiming, YANG Ming, LIU Keshu, et al. Parameter self-tuning and optimization of speed PI controller for permanent magnet synchronous servo system[J]. Electric Machines and Control, 2014, 18(2):102.
[8]王宏佳,杨明,牛里,等. 永磁交流伺服系统速度控制器优化设计方法[J]. 电机与控制学报,2012,16(2):25.
WANG Hongjia, YANG Ming, NIU Li, et al. Optimum design method of speed controller for permanent magnet synchronous servo system[J]. Electric Machines and Control, 2012, 16(2):25.
[9]左月飞, 刘闯, 张捷, 等. 永磁同步电动机转速伺服系统PI控制器的一种新设计方法[J]. 电工技术学报, 2016,31(13):180.
ZUO Yuefei, LIU Chuang, ZHANG Jie, et al. A novel design method of PI controller for permanent magnetic synchronous motor speed servo system[J]. Transactions of China Electrotechnical Society, 2016, 31(13): 180.
[10]符慧, 左月飛, 刘闯, 等. 永磁同步电机转速环的一种变结构PI控制器[J]. 电工技术学报, 2015, 30(12): 237.
FU Hui, ZUO Yuefei, LIU Chuang, et al. A variable structure PI controller for permanent magnetic synchronous motor speed-regulation system[J]. Transactions of China Electrotechnical Society, 2015, 30(12):237.
(编辑:邱赫男)
