运动模糊角度检测的两种改进方法
2019-06-04周军,韩森,2
周 军,韩 森,2
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.苏州慧利仪器有限责任公司,江苏 苏州 215123)
引 言
随着科学技术的发展,各种摄影设备在我们的日常生活中被广泛应用,例如智能手机、各种相机以及各种监控设备,使我们获取图像的手段越来越多。由于在获取图像的时候会受到气流扰动、机身震动、运动速度、器材设定等因素的影响,实际获得的图像会产生模糊以致影响图像的识别效果。尤其是对运动物体进行图像识别时,更需要将模糊的数字图像复原成清晰的图像。
图像复原的关键点就在于点扩散函数的估计(PSF),因其直接关系到图像复原的效果。对于PSF的估计,国内外学者提出了很多的方法。文献[1-3]分析了模糊图像频谱图条纹的规律信息,给出了相应的检测算法,如Hough变换和EM算法。文献[4]用拉氏算子对模糊图像进行无方向性的二阶微分,且利用了微分图像的自相关结果,但计算量大,抗干扰能力不强。文献[5]对图像频谱的暗条纹直接进行Radon变换计算其方向角度,但此方法对条纹不清晰、对比度较小的频谱图像检测精度差,抗干扰能力不强。文献[6]采用频谱块与边缘检测相结合的方法,虽然能避免中心十字亮线,但是也裁剪了很多有用的信息。因此,对于运动模糊图像频谱图中的十字亮线影响模糊角度检测的问题,本文提出了两种改进方法。
1 运动模糊模型
通常一幅退化图像(即模糊图像)可以看成是一幅清晰图像与退化函数的卷积,考虑噪声干扰的影响(一般假设噪声是加性的),则这个图像的退化过程(模糊过程)可以用数学表达式表示为

式中:g(x,y)为退化的图像;h(x,y)为退化函数,也就是点扩散函数(PSF);f(x,y)为原图像;η(x,y)为加性噪声; ⊗为卷积运算符。图像一般都由二维离散的数据组成,在实际应用中,退化模型写成如下形式:

式中:M、N分别为图像的长和宽。
在没有噪声干扰的情况下,即

空域中的卷积关系对应于频域中的相乘关系,所以可以得到频域模型

假设原图像f(x,y)做直线运动,x(t)和y(t)分别是x轴和y轴方向上的运动时间变化分量,并且假设曝光时间为T,噪声为0,则有

g(x,y)表示运动模糊后的图像,若将表达式两边分别进行频域变换,则可以求出其频域表达式如下:


若令模糊长度为L,模糊角度为,则该模糊图像的点扩散函数为
根据上式可以看出,复原模糊图像的关键点在于点扩散函数的求解,而点扩散函数的求解关键在于模糊长度L和模糊角度的求解。
2 模糊角度估计
2.1 模糊图像频谱非中心化检测模糊角度
王琳等[7]采用频谱块与边缘检测相结合的方法,该方法将模糊图像频谱图分块,裁剪去中心十字亮线部分,如图1所示。

图1 运动模糊图及其频谱图和裁剪图Fig.1 Image of motion blur and its spectrum with and without magnification
可见裁剪过后,虽然去掉了十字亮线,但也裁剪掉了很多有用的信息,如图1(c)所示,导致检测精度不高。
针对十字亮线问题,本文提出了提高Radon变换检测模糊角度的一种改进方法(改进方法一),其具体方法为:将模糊图像的频谱图非中心化,则十字亮线被分散到四个角落里,再进行裁剪,这样既保留了原图的主要信息,又剪去了十字亮线;接着用Canny算子进行边缘检测,从而提高了Radon变换的检测精度,改进结果如图2所示;随后对图2(d)进行Radon变换,求模糊角度,如图3所示(图中Rt表示灰度值叠加求和,表示矩阵R相对应的坐标位置,表示旋转角即Radon变换中对图像进行投影的方向)。

图2 改进方法一图Fig.2 Image obtained by method 1
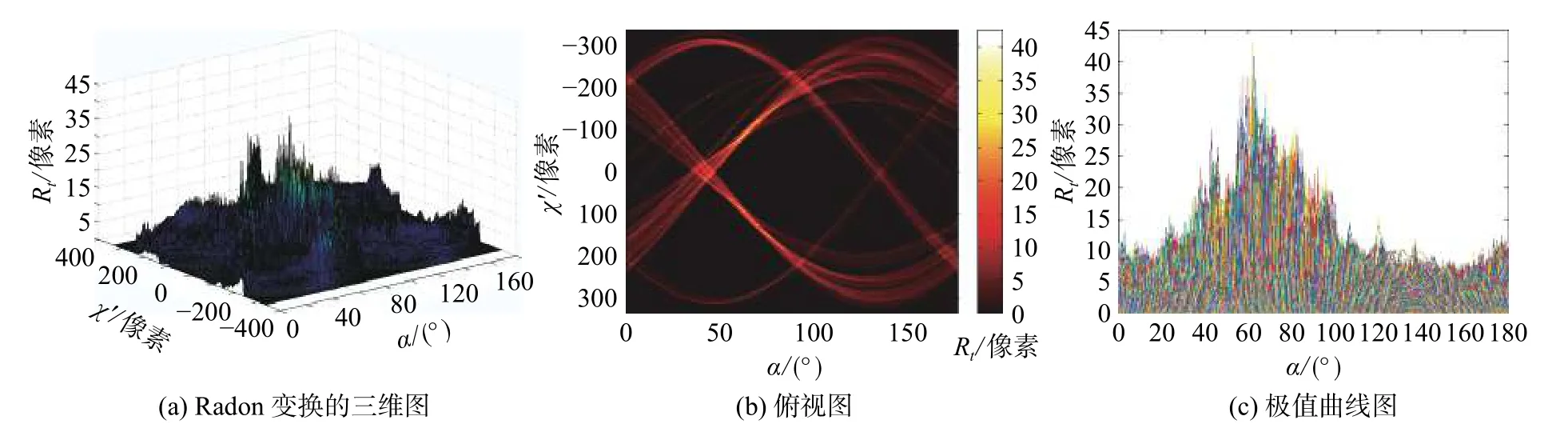
图3 Radon 变换一Fig.3 Method 1 after Randon transformation
根据上述分析,我们的改进方法一步骤如下:
(1)对模糊图像g(x,y)进行二维离散傅里叶变换得到频谱图G(u,v),为了增强其频谱图条纹的清晰度,我们取其频谱图谱再进行对数运算G′(u,v)= |lg(|G(u,v)|+1)|。
(2)将G′(u,v)非中心化,则得到一个新的频谱图B(u,v)。
(3)对新的频谱图B(u,v)进行裁剪,得到D(u,v)(将四个边角上的十字亮线裁剪掉,裁剪掉了干扰信息,大大减少了十字亮线对Radon变换的影响)。
(4)对裁剪后的图像进行Canny边缘检测,得到一个有白色线条的图像。
(5)将图像E(u,v)进行Radon变换,得到一个矩阵R,然后将这个矩阵R和旋转角画一个极值曲线,求出其最大值,最大值对应的横坐标就是其旋转的角度,则该角度就是我们所求的运动模糊角度,的取值范围为0°~180°。
2.2 用模糊图像的二次傅里叶变换检测模糊角度
上述方法是对模糊图像做一次傅里叶变换,用Canny算子检测其明暗相间的条纹信息,但Canny算子只是在图像中找出具有局部最大梯度幅值的像素点,而对于频谱图中明暗相间条纹模糊且梯度较小的时候,其边缘检测和Radon变换的误差将会非常大,如图4所示。
图4(c)边缘检测图显示不出明暗相间条纹的边缘信息,且中心十字亮线对检测精度影响较大,以致Radon变换检测误差较大。
针对这样的问题,我们对该模糊图像进行二次离散傅里叶变换(改进方法二),以此来细化条纹,然后进行边缘检测。从图5可以发现,中心十字亮线的干扰很严重,且二次傅里叶变换的频谱图主要信息分布在中心地带(见图5(c))。通过裁剪该频谱图的中心部分,(见图5(e)),可以减少中心十字亮线的干扰,提高Radon变换的检测精度,对图5(e)进行Radon变换后即可求得模糊角度,如图6所示。

图4 模糊图像、频谱图及其边缘检测Fig.4 Blur image, spectrum and edge detection
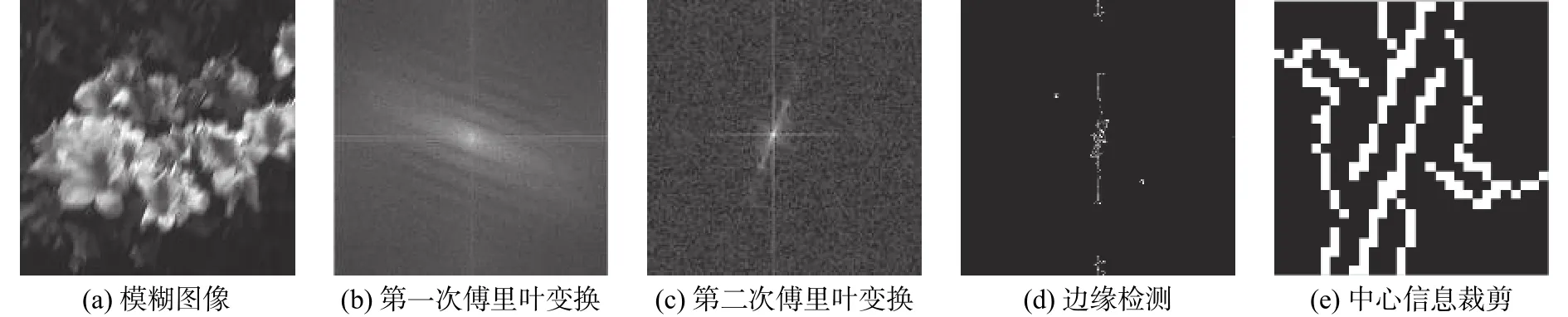
图5 改进方法二图Fig.5 Image obtained by method 2

图6 Radon 变换二Fig.6 Method 2 after Randon transformation
根据上述分析,我们的改进方法二步骤如下:(1)求模糊图像g(x,y)的二次傅里叶频谱图。先其中为了增强条纹清晰度和压缩灰度范围,使G′(u,v)= |lg(1+|G(u,v)|)|,再次傅里叶变换其中C′(j,k)=|lg(|C(j,k)|+1)|。
(2)对C′(j,k)进行Canny算子边缘检测,得到一个二值图像D(j,k)。
(3)将上述二值图像进行裁剪,保留其中心信息,裁剪去多余的十字亮线部分,得到。
(4)对E(j,k)进行Radon变换,得到一个矩阵P,根据矩阵P和旋转角画一个极值曲线,求出其最大值,最大值对应的横坐标就是其旋转的角度,再根据换算关系,得到所求模糊角度与旋转角的关系

式中 α的取值范围为0°~180°。
3 实验数据与分析
为了分析和验证上述两种改进方法的可靠性,我们分别对不同模糊角度的两幅图(如图7、图8所示)进行对比实验,模糊角度和模糊长度由计算机仿真所得,所以可以有真实角度提供对比。

图7 Lena (频谱图条纹清晰)Fig.7 Lena image (clear fringes in the spectrum)

图8 Bridge(频谱图条纹不清晰)Fig.8 Bridge image (blur fringes in the spectrum)
表1数据表明:在频谱图条纹清晰的时候(图7),直接对模糊图像的频谱图进行Radon变换可以大致检测出角度,但检测精度不高,且模糊长度越小,其检测误差越大;分块频谱图可以提高精度,但是相对于我们改进的方法一和方法二,误差比较大,检测精度没有我们改进后的高,方法一相对于方法二精度较高。

表1 运动模糊图像(图7)模糊角度检测误差对比结果Tab.1 Errors of the motion blur angle in Fig.7

表2 运动模糊图像(图8)模糊角度检测误差对比结果Tab.2 Errors of the motion blur angle in Fig.8
表2数据表明:在频谱图条纹不清晰时(图8),直接对模糊图像的频谱图进行Radon变换和频谱图分块的方法误差较大,且改进方法一的检测误差也非常大,说明边缘检测检测不出模糊图像频谱图的明暗相间的条纹,同时将中心十字亮线检测了出来,所以很多数据都是接近90°,而改进方法二的检测精度相对于其他的方法就很高。
对比表1、表2,我们可以发现:在频谱图条纹较清晰时,改进方法一的检测精度较高;在频谱图条纹较为模糊时改进方法一误差较大,而改进方法二的检测精度较高。
4 结 论
运动模糊图像的复原,其PSF的获得直接影响图像的复原效果,为了提高运动模糊图像的模糊角度检测精度,在其他学者研究的基础上,本文提出了两种不同的改进方法。针对不同的模糊图像频谱图,给出了不同的检测方法,检测精度得到了提高。但是本文也存在着一些不足,因为在运动模糊图像的获取中一般都会存在多方向、多尺度的模糊,并且在照明条件较差的时候,也会存在大量的噪声,在后续的工作中,这些问题还有待进一步的解决。
