智能网联新能源汽车能量管理优化控制仿真软件设计与应用*
2019-05-28周维梁伟铭蔡俊应天杏杨林
周维 梁伟铭 蔡俊 应天杏 杨林
(1.上海交通大学,上海 200240;2.上海汽车集团股份有限公司,上海 201804)
主题词:智能网联新能源汽车 能量管理 仿真软件
1 前言
为解决当前汽车带来的能源危机、环境污染、交通拥堵等问题,将新能源汽车(New Energy Vehicle,NEV)与智能网联汽车(Intelligent and Connected Vehicle,ICV)特性融为一体的智能网联新能源汽车(Intelligent and Con⁃nected&New Energy Vehicle,IC&NEV)已逐渐成为汽车技术发展的焦点[1]。现有研究已表明,车辆能耗除与车辆动力系统拓扑结构、参数相关外,还与车辆周围实时交通环境相关,基于车路环境信息的车辆自适应能量管理控制策略(Energy Management Strategy,EMS)研究已成为IC&NEV的一项关键技术。然而,IC&NEV属于车辆、能源、交通、电子信息、人工智能和控制等多学科交叉领域,其研究面临着技术分散度大、集成难度高等问题[2-3]。针对此问题,研究人员亟需一款IC&NEV能量管理控制策略仿真软件,以降低实车道路测试的成本与风险。
根据侧重内容不同,现有与IC&NEV研发相关的软件可分3类:车辆动力系统仿真软件,如Advisor 2002、AVL Cruise、CarSim和PSAT等[4],此类软件由于缺乏对智能交通系统(Intelligent Transportation System,ITS)信息或车联网(Vehicle to Everything,V2X)信息的支持,制定出的能量管理控制策略多为规则策略,若道路环境工况发生变化,不能确保控制策略具备自适应性;ICV仿真软件,如PreScan、PanoSim、IPG CarMaker等,此类软件多侧重ICV无人驾驶技术的研发,如感知、决策、执行等;ITS仿真软件,如SUMO、VISSIM、S-Paramics、Trans⁃Modeler、Visum、TransCAD等,此类软件多侧重于道路拓扑结构设计、红绿灯优化控制、交通流控制研究等。
可见,能将车辆动力系统信息与ITS/V2X信息进行融合研究的仿真软件较为匮乏。为此,本文基于统一建模语言(Unified Modeling Language,UML)面向对象编程,采用创建者(Builder)设计模式,结合MATLAB、PostgreSQL和SUMO(Simulation of Urban MObility)等软件,开发出一款IC&NEV仿真软件,用于IC&NEV能量管理控制策略研究。
2 IC&NEV仿真软件设计思想
为便于IC&NEV仿真软件使用及二次开发、维护,本文基于UML面向对象编程与Builder设计模式进行模块化建模。
2.1 UML面向对象编程
面向对象编程是把任务分解成相互独立的对象(Object),然后通过各对象之间的组合和通信来模拟实际问题[5]。UML则是一种描述、构造和文档化系统制品的可视化语言。采用UML类图对程序中各类(对象)进行描述,可使软件易使用、易维护。
根据车辆动力系统组成,IC&NEV可分为智能网联电动汽车、智能网联混合动力汽车、智能网联燃料电池电动汽车等。尽管这些车辆动力系统的拓扑结构不同,但都是由车身、电机、动力电池等部件组成,这些部件就是一个个对象,如图1所示。通过对这些对象的组合,就可构造出不同类型的车。此外,这些动力系统各子部件也有多种类型,如电机可以分为感应电机、永磁同步电机等。此时,可对各具体、相似对象的共性属性(Property)、共性方法(Method)进行抽象,形成一个类(Class),如电机类、动力电池类。
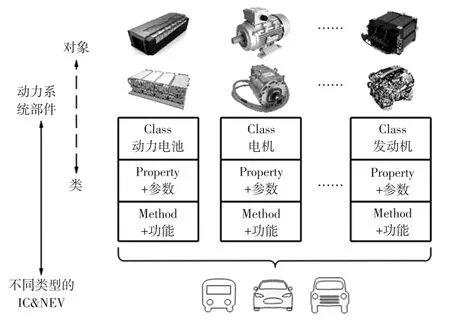
图1 面向对象车辆动力学建模思想
2.2 Builder设计模式
Builder设计模式将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示。在Builder设计模式中[5],首先需要指挥者(Director)类来指导对象的构建过程,其次,需要具体的Builder类,用于制造不同的产品(Product)。在Builder设计模式中,Builder为Director提供构造产品的抽象接口,该接口使得Director可以隐藏具体产品的表示和内部构造,同时也对用户隐藏了该产品是如何装配的。
3 IC&NEV仿真软件具体设计
3.1 IC&NEV软件架构设计
IC&NEV仿真软件主要采用SUMO、PostgreSQL、MATLAB进行联合开发。其中,SUMO负责交通建模,PostgreSQL负责构建地理信息系统(Geographic Information System,GIS)数据库,MATLAB进行车辆动力学建模与相关控制算法研究,三者的关系如图2所示。在逻辑结构上,该仿真软件由3层结构组成,如图3所示。其中,通信接口通过java数据库连接(Java DataBase Connectivity,JDBC)接口获取 PostgreSQL 的GIS信息,通过TCP/IP接口(即TraCI接口)获取SUMO中的实时ITS、V2X信息。
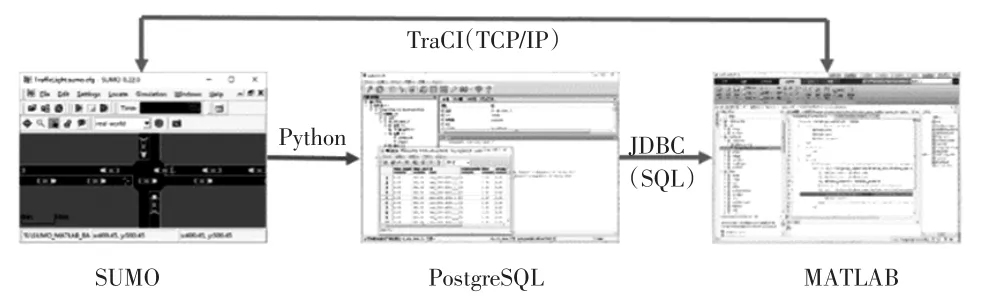
图2 IC&NEV仿真软件组成
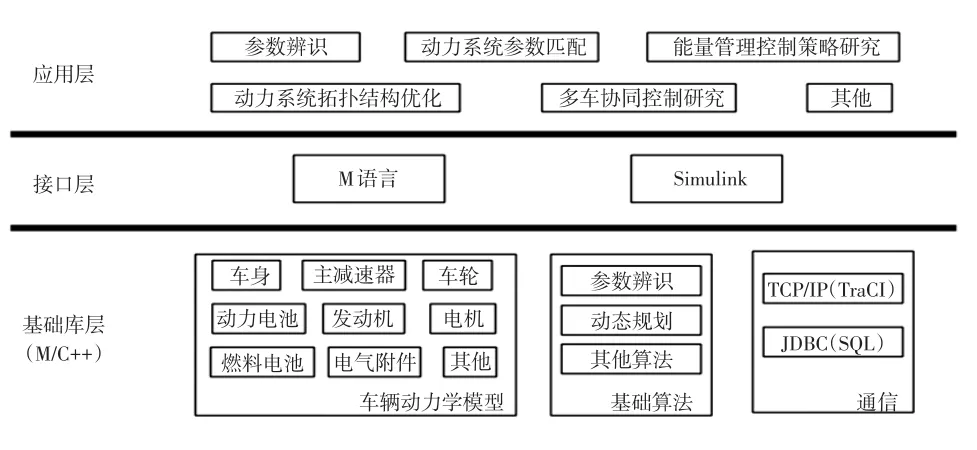
图3 IC&NEV仿真软件架构示意
3.2 智能交通建模
SUMO是一款开源的微观道路交通仿真软件[6]。SUMO中有3种常见的交通建模方法[7]:使用XML文件手动建模;采用JOSM软件,使用OPenStreetMap编辑器创建交通路网文件,相比于手工建模,该方法建模速度快,且与实际路网较为吻合;使用一些开源交通场景,如Luxemburg、TAPASCologne、Bologna等。
3.3 GIS数据库建立
为便于使用MATLAB对SUMO中的车辆进行在线优化控制研究,建立交通模型后,本文通过Python编程语言对交通模型中路网等文件数据进行预处理,构建路网GIS数据库,具体流程如图4所示。通过JDBC接口,MATLAB中的车辆动力学模型很容易获取到Post⁃greSQL中的GIS数据[8]。
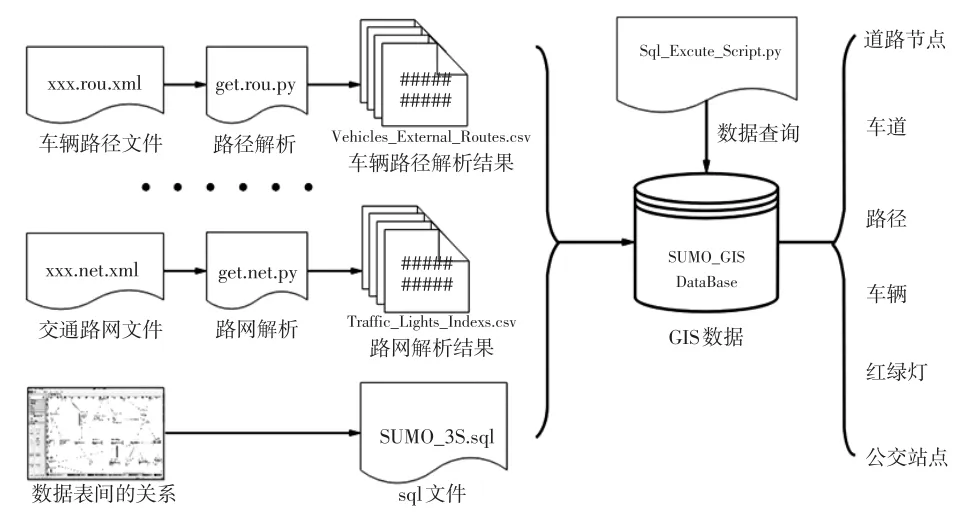
图4 通过Python创建GIS数据库的流程
3.4 车辆动力学建模
以动力电池模型构建为例,阐述使用UML面向对象建模方法。
3.4.1 动力电池基本原理
当前,用于整车动力学建模的动力电池模型可分为准静态模型和动态模型。
a.准静态模型
Rint模型是当前应用最为广泛的动力电池准静态模型,它将动力电池等效为1个理想电压源与1个电阻串联的电路,由基尔霍夫电压定律可得:

式中,UOC为开路电压;Ri为动力电池内阻;Ub为电池端电压;Ib为电流。
由式(1)可得:

式中,Pbatt为t时刻电池的输出功率。
b.动态模型
Thevenin模型[9]是当前最简单、实用的动力电池动态模型。相比于Rint模型,该模型考虑了电压在充、放电流激励下的突变性与渐变性特点。由基尔霍夫电压和电流定律可得:
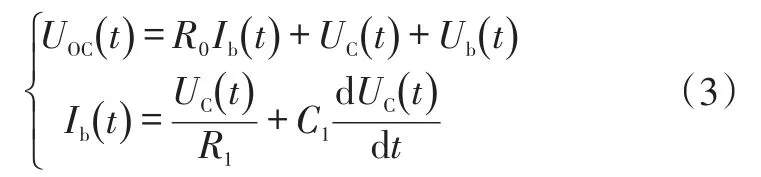
式中,R0为欧姆内阻;C1、R1分别为极化电容、电阻;UC为极化电阻两端电压。
由式(3)可得:

如果电池荷电状态(SOC)初始值为SOC(t0),采用安时积分法[10],则当前时刻的SOC为:

式中,η为库伦效率;Qbatt为电池额定容量。
3.4.2 动力电池UML类图
由3.4.1节可知,Rint模型与Thevenin模型具有相同之处,如:共同的属性,计算过程中都需要电池开路电压、额定容量、电流等参数;共同的方法,都是基于基尔霍夫定律与安时积分法计算当前SOC。与此同时,也有不同之处,如:不同的属性,Thevenin模型需要有极化电阻、电容参数;不同的方法,Rint模型与Thevenin模型电流计算公式不同。
针对相同之处,可设计Battery基类,来概括这些共有的属性(如动力电池开路电压、额定容量等)和共有的方法(如计算当前SOC函数Cal_Battery_SOC())。由于不确定具体采用的动力电池模型种类,所以在Battery类中,这些方法都必须是抽象的(Abstract)。在基类Battery中只申明,将定义置于子类Rint与Thevenin中完成,各类之间的关系如图5所示。
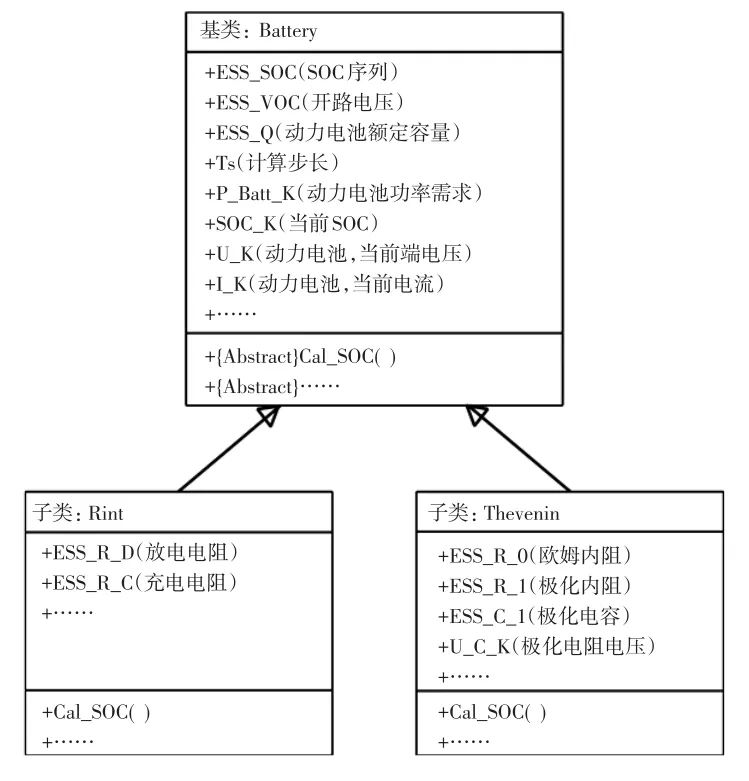
图5 动力电池模型UML类图
3.5 基于Builder设计模式的软件组成
针对当前交通系统正处于由非智能网联向完全智能网联过渡的过程,该软件平台设计了3种主要研究场景:NEV非智能网联下的能量管理优化控制研究;基于行驶工况自适应的IC&NEV能量管理优化控制研究;基于自主模拟驾驶的IC&NEV能量管理优化控制研究。图6所示分别为这3种研究场景下的数据计算流程示意。
由图6可知,这3种研究场景下的计算流程都可固定,十分适合采用Builder设计模式。图7所示为基于Builder设计模式设计出的IC&NEV仿真软件UML类图。其中,VehicleTechnician类是Director,用于指导IC&NEV的构建过程,VehicleBuilder是抽象的Builder类,在实际使用中,需要对其具体化,用来定义不同类型的Vehicle,如构建电动汽车(Electric Vehicle,EV)类的称为EVBuilder、构建混合动力汽车(Hybrid Electric Vehicle,HEV)类的称为HEVBuilder。这些类大致相似,但细节与具体车辆类型相关。
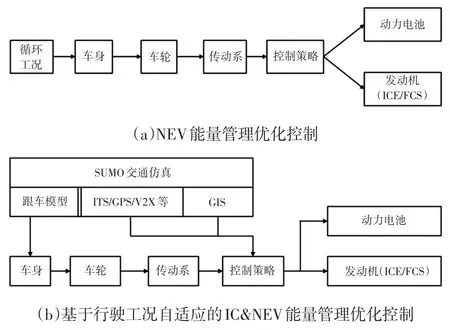
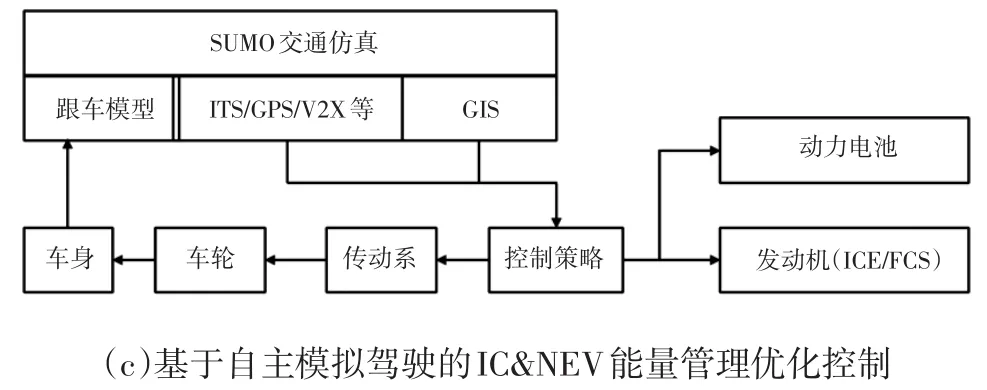
图6 3种不同研究场景的计算流程
图8所示为基于Builder的设计模式在MATLAB软件平台上开发出的IC&NEV仿真软件各个类文件的组织结构。其中:PostgreSQL类属于MATLAB与Post⁃greSQL的接口函数;SUMO_TraCI是MATLAB与SUMO进行数据通信的类,是对A F Acosta、J E Espinosa等人[11]所提供的TraCI4Matlab软件包进行面向对象改写而来的。通过SUMO_TraCI,MATLAB中的车辆动力学模型可以实时获取目标车在SUMO交通仿真场景中的GPS信息、ITS信息、V2X信息等;与此同时,也可改变目标车的驾驶行为,如车速、车辆变道以及行驶路径等。
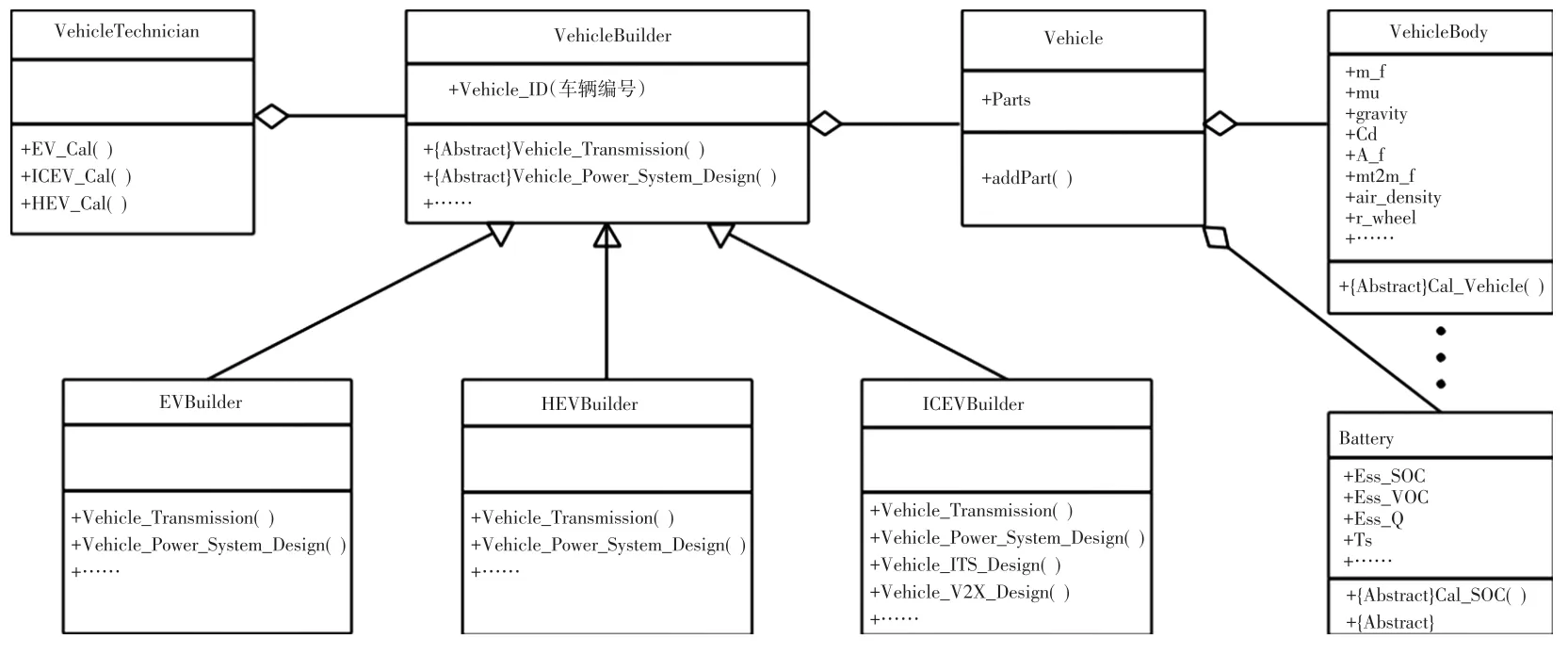
图7 基于Builder设计模式的IC&NEV仿真软件UML类图
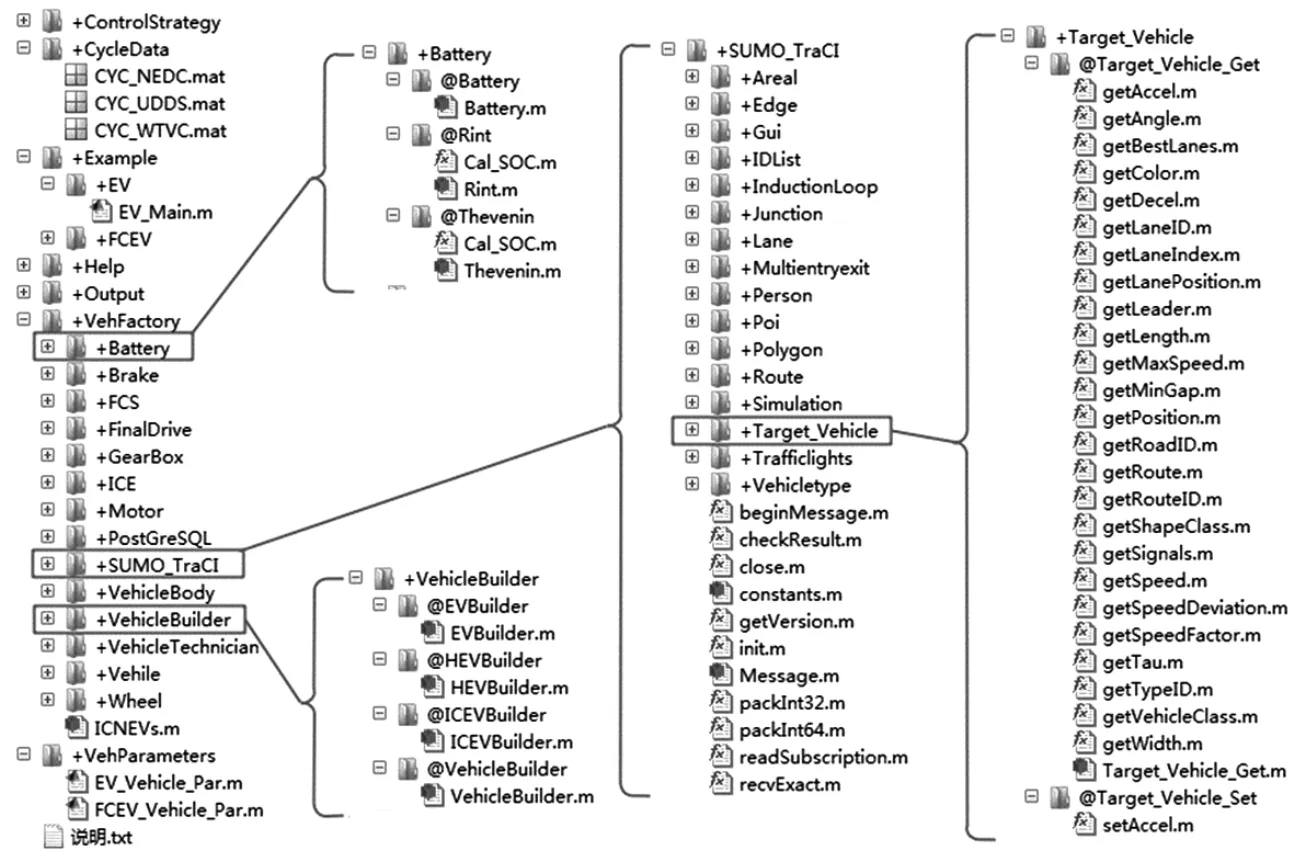
图8 MATLAB中IC&NEV仿真软件各个类文件的组织结构
3.6 基础算法集成
为便于后续研发,该仿真软件集成了两个基础算法,即参数辨识算法和能量管理优化控制算法。
3.6.1 参数辨识算法
当前,参数辨识方法主要分为经典系统辨识方法和现代系统辨识算法[12]。其中,遗传算法(Genetic Algo⁃rithm,GA)作为一种现代辨识算法[13],对全局有较好的辨识精度,被选为本平台参数辨识的算法。
3.6.2 能量管理优化控制策略算法
动力系统拓扑结构与动力系统部件确定后,能量管理控制策略是决定NEV燃油经济性的关键因素。当前,NEV能量管理优化控制策略可分为基于规则的控制策略和基于优化算法的控制策略[14]。其中,DP算法[15-16]能指导规则控制策略的制定,也能作为不同控制策略燃油经济性的评判基准。因此,DP算法被选为本平台能量管理优化控制研究的基础算法。
4 基础应用案例研究
基于该仿真软件,本文给出3个基础应用案例:动力电池参数辨识,用于验证模型的准确性;某燃料电池汽车(Fuel Cell Electric Vehicle,FCEV)能量管理策略全局优化,用于验证DP算法对规则策略制定的指导;某EV轨迹主动优化,用于探讨车路协同控制的效果。
4.1 参数辨识(以动力电池为例)
新能源汽车在运行中,由于不同电池组存在制造不一致性、不同程度老化的等问题,导致动力电池实际参数与厂家提供的理论数据有所偏差。因此,在对车辆进行仿真前,需要采集实车数据,对厂家提供的理论数据进行校核、修正。本文选择某混合动力汽车动力电池进行参数辨识。
在不考虑温度影响的条件下,分别选取Rint模型与Thevenin模型采用GA对动力电池参数进行辨识。辨识结果如图9所示,其中R模型表示基于厂家提供的理论参数数据采用Rint模型进行仿真;GA-R模型表示基于实车采集的数据采用Rint模型进行辨识、仿真;GA-RC模型表示基于实车采集的数据采用RC模型进行辨识、仿真。
从仿真结果可看出,GA-R模型与GA-RC模型相比于R模型,仿真结果均更为接近实际采集的数据。可见,经过参数辨识后的模型,其计算结果能逼近于实际数据,可较好地反映动力电池的动、静态特性。
4.2 能量管理控制策略(以某FCEV为例)
本文选择某FCEV,其系统拓扑结构见文献[17],主要参数如表1所示。结合该仿真软件,采用DP算法对其能量管理控制策略进行研究。
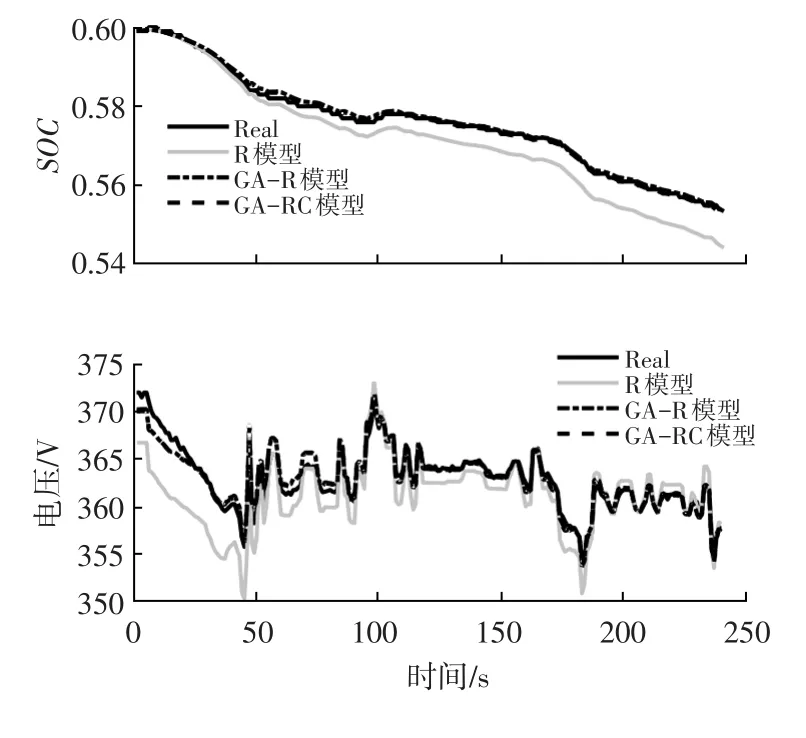
图9 实车采集数据与R、GA-R、GA-RC模型对比分析
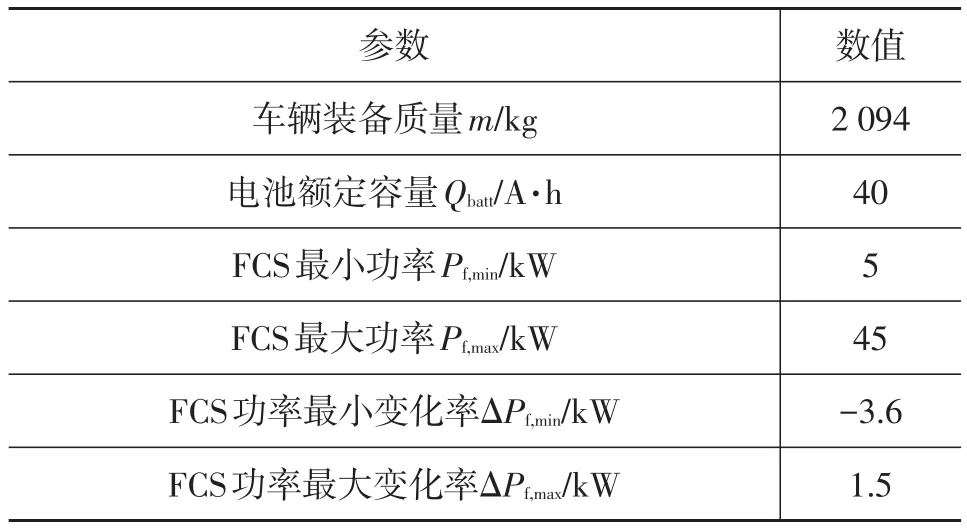
表1 某FCEV部分参数
考虑到燃料电池系统(Fuel Cell System,FCS)频繁启停会带来其寿命的衰减,因此,本文选择FCS常开控制策略。考虑到FCS功率存在瞬时特性,建立状态空间数学方程:

约束条件:
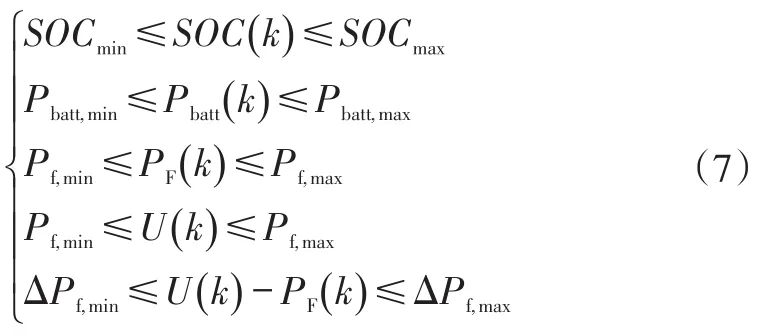
性能指标:

式中,N为总的仿真步长;PF为FCS指示功率;U为FCS指令功率;m˙H2为氢气消耗率;SOCmax、SOCmin分别为最大、最小SOC;Pbatt,max、Pbatt,min分别为电池的最大、最小输出功率。
计算结果如图10所示。由图10可知,在NEDC工况下,百公里氢气消耗为1.332 kg,FCS工作点主要分布在3个区域:SOC大于平衡时的数值时,FCS工作点分布在7.5 kW附近(区域A);SOC小于平衡时的数值,而整车需求功率为正时,FCS工作点分布在14~17.5 kW范围内(区域B);SOC小于平衡时的数值,且整车处于制动阶段时,FCS工作点分布在12.5 kW附近(区域C)。据此,可对NEDC工况下该车辆控制规则策略进行优化。
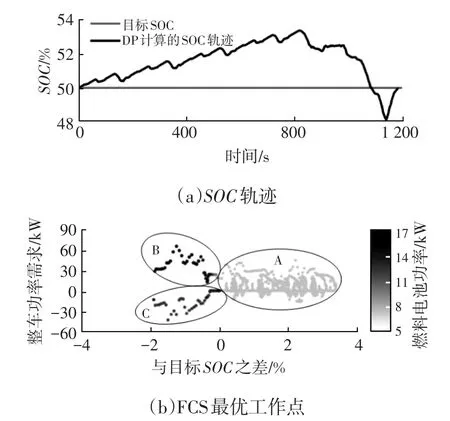
图10 NEDC工况下SOC轨迹与FCS最优工作点分布
4.3 车路协同优化控制(以EV通过红绿灯路口优化为例)
在城市道路上,受红绿灯间隔性的影响,车辆经常不得不在红绿灯路口频繁起停,不仅导致车辆能耗增加,甚至还带来了交通拥堵。随着V2X、ITS技术的发展,车辆可预知前方车辆信息、前方红绿灯信息,从而可结合自身动力系统的特性,对其运动轨迹进行规划,减少车辆在红绿灯路口的频繁起停。
基于本软件平台,本文对某单电机、固定挡位的EV通过红绿灯路口的轨迹行为进行优化,车辆主要参数如表2所示。

表2 某EV部分参数
图11所示为在SUMO中搭建的虚拟交通场景,设置了3个红绿灯。根据牛顿运动定律以及车辆纵向动力学公式,建立状态空间模型:
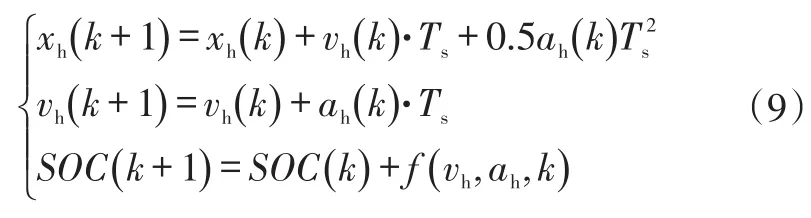
式中,xh、vh、ah、Ts分别为车辆里程、速度、加速度以及采样步长。
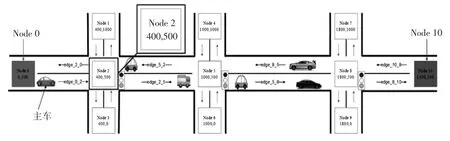
图11 SUMO中建立的虚拟交通场景示意
优化目标为使车辆从Node 0到Node 10所消耗的能量最小,考虑到对时间的约束,因此性能优化指标定义为:

式中,tf、w1、w2分别为里程时间、时间权重系数和能耗权重系数。
采用DP算法对式(10)进行求解,计算结果如图12所示。由图12可知,经过优化的车辆除在第1个红绿灯路口停车外,在其他路口均顺利通行,而没有优化轨迹控制策略的车辆,在3个红绿灯路口均需停车等待。轨迹优化后,该车辆百公里能耗由10.44 kW·h降至7.68 kW·h,节约了26.5%的能量,而行驶时间由274 s减少到266 s,节约了2.92%的行驶时间。
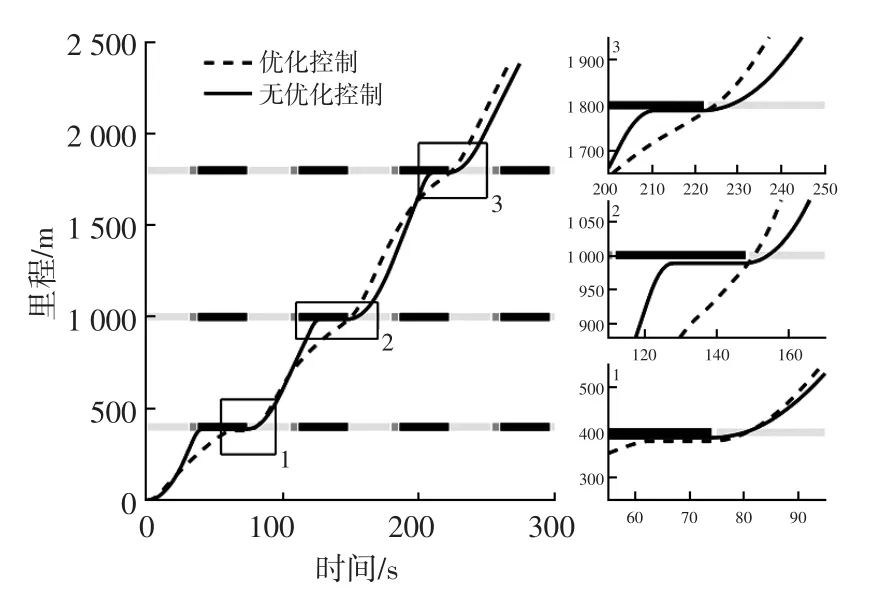
图12 EV轨迹优化结果分析
5 结束语
针对当前IC&NEV能量管理优化控制研究基础软件匮乏问题,本文基于UML面向对象编程,采用Builder设计模式,结合MATLAB、PostgreSQL、SUMO 3款基础软件,开发出IC&NEV仿真软件。测试结果表明,该仿真软件能够辅助IC&NEV动力系统优化控制研究。
此外,由于采用了UML面向对象建模的开放、封闭设计原则,使得该软件不仅具备二次开发能力,还特别适合多车协同优化控制研究。基于该软件,今后将对3个领域展开深入研究:基于ITS/V2X信息的IC&NEV能量管理优化控制策略研究;基于自主模拟驾驶IC&NEV的能量管理优化控制研究;从非智能网联到完全智能网联过渡的不同交通场景中,多车协同优化控制研究。
