航空发动机整机振动测量和分析方法
2019-05-27
(中航工程集成设备有限公司,北京 102206)
0 引言
航空发动机是一种结构复杂的高速旋转机械,旋转机械不可避免的会出现振动,而发动机的整机振动主要是转子不平衡引起的周期振动和发动机流道内气体流动、燃烧等原因引起的随机振动的复合,由于装配精度以及装配过程中动平衡的情况与发动机实际工况的差异,实际的发动机转子总是会存在一定的残余不平衡量。发动机台架试车测量整机振动的目的是为了对发动机零部件加工、装配及转子动平衡的质量进行检验的一种手段。目前国内仍有很多航空发动机试车台使用的是模拟振动测量仪,配套专门的振动传感器完成对发动机的振动测量,选择带有滤波和积分功能的振动信号放大器,滤波和积分选择均需针对机型专门定制,灵活性不够,同时也不能分析振动频率,满足不了发动机振动分析的要求。如何以合理的方法,选择合适的振动传感器和振动测量仪,迅速准确地测量发动机的振动值并分析振动频率是发动机厂、所对发动机整机台架试验的要求。
1 整机振动测量硬件组成
一般涡喷、涡扇、涡轴、涡桨发动机最小工作状态和最大工作状态的转子转速范围在300~60 000 rpm,因此由转子引起的发动机一阶振动频率的范围为5~1 000 Hz,这个频率范围的振动正好与振动速度传感器的频响范围相吻合,因此目前仍有很多机种的发动机采用振动速度传感器。美国军用标准—《航空涡轮喷气和涡轮风扇发动机通用规范》也规定发动机的振动用速度有效值表示。
振动速度传感器是利用磁电感应原理把振动信号变换成电信号,它主要由磁路系统、惯性质量、弹簧阻尼等部分组成。由于振动速度传感器质量较重,使用温度范围较小(一般不大于200 ℃),越来越多的新机种中的振动传感器使用了压电式加速度传感器。压电加速度计是根据某些材料的压电效应设计的,它输出的电信号与振动加速度成正比,通过积分电路可以测量振动速度和振动位移。压电加速度计的频率范围宽,能够设计成耐高温型,能在高温环境中有效地工作,现在压电加速度计最高使用温度为650 ℃,能满足发动机高温部位振动测量的要求。由于压电加速度计的频响范围较高,因此为了测量和分析5~1 000 Hz的振动信号,就必须在测量系统中加入抗混滤波器, 振动测量系统硬件组成如图1所示。
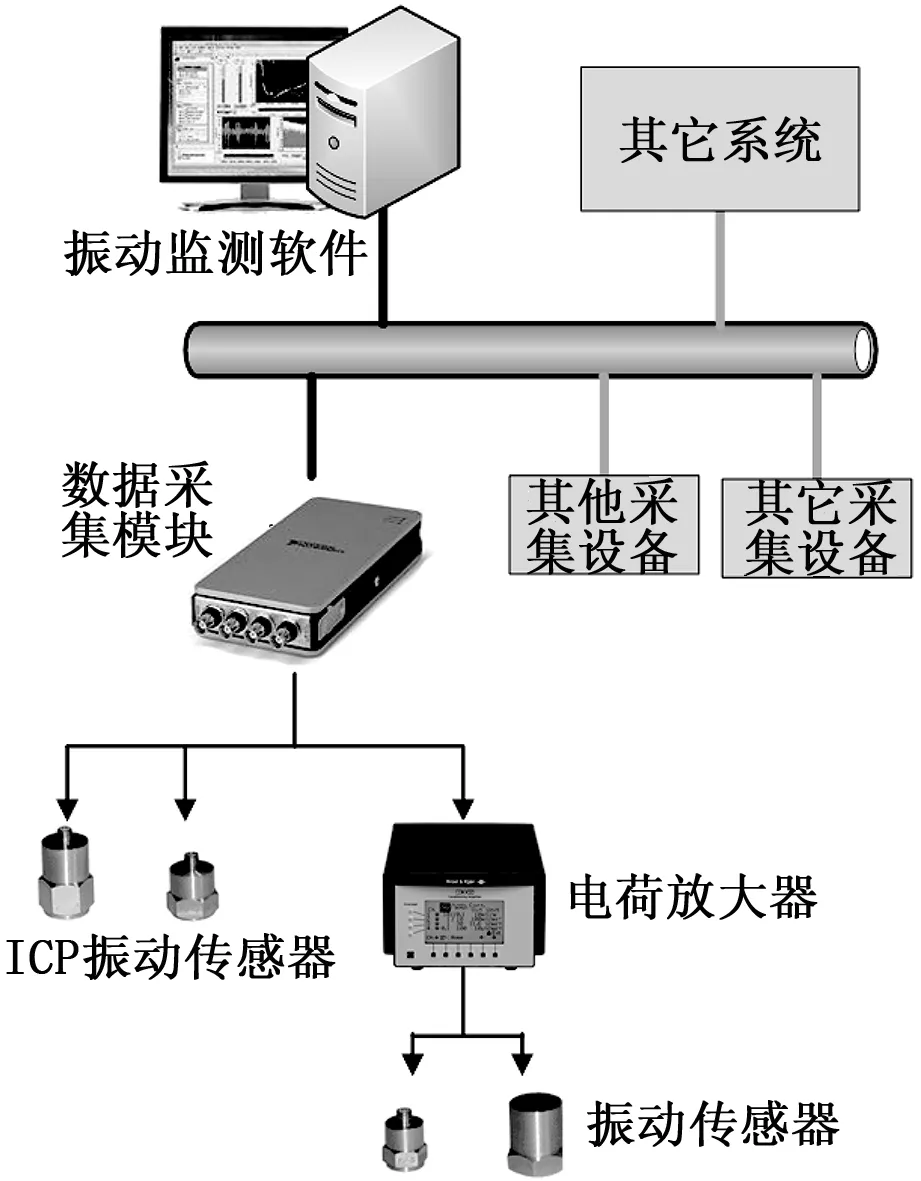

图1 整机振动测量硬件系统框图
压电加速度计包括常规的加速度计和icp(integrated circuits piezoelectric)加速度计。常规的加速度计需要配套电荷放大器,而ICP型的加速度计由于内部集成了放大电路,因此可以不用配套电荷放大器,测量系统得到了简化。测量系统中选用的数据采集模块必须带有抗混滤波功能,否则有可能产生混叠效应。
另外航空发动机的振动测量还需选择合适的测振点安装振动传感器,不同机型的发动机有不同的测振点安装要求。传感器安装支架的设计需要考虑对发动机的影响最小,并且需有足够的刚性。测振点选择一般在发动机转子的前支承机匣和后支承机匣附近。涡喷发动机、涡轴发动机的涡轮附近由于有高温燃气,其测点温度一般比较高,需要对安装在此处的振动传感器采取冷却措施,涡扇发动机由于有外涵,外部机匣的温度不高,可以不用进行冷却。
2 整机振动测量软件设计
发动机整机振动测量软件除了具备常规振动测量软件的功能外,还必须具备转速测量及分析功能,由于航空发动机多为双转子发动机,需要从振动信号中提取出不同转子对应的振动分量,该振动分量的提取需要跟随发动机转速的变化而改变。
本软件功能划分为有身份验证、系统自检、测量硬件配置管理、测量方案配置管理、传感器标定、转速信号获取、振动信号显示及分析、历史记录存储及回放、报表打印。
2.1 身份验证
系统根据用户输入的用户名和密码,确定当前操作者的权限和使用功能。
用户只有通过身份验证才能运行系统。
每个用户对应一个角色,每个角色对应不同的权限。
任何身份的人员只要密码验证通过即可运行本程序。
2.2 系统自检
系统自检是对系统运行环境的检查,以确保系统在正常环境下运行,系统运行稳定可靠,测量数据准确可信。
检测项包含如下:
检测数据采集设备状态是否正常。检查应当给出结论,提示给用户。
检测的过程中,如果发现异常,直接给出提示,如某设备连接出错等提示,指导操作人员排故。
2.3 测量硬件配置管理
测量硬件配置管理包括:
选择采集设备,如为固定设备此项可不选;
选择激活的采集通道(1~Max通道);
设定采集卡的采集频率及分析样点数,样点数设定选择为512/1024/2048/4096,缺省为1024;
为每个激活的采集通道设定输入方式(ICP或电压,缺省为电压);
为每个激活的采集通道设定耦合方式(缺省为AC耦合);
为每个激活的采集通道设定量程输入范围;
为每个激活的采集通道设定传感器类型(位移/速度/加速度),以及灵敏度系数(位移对应mv/mm,速度对应mv/mm/s,加速度对应mv/g或mv/m/s2)。
以上所有配置数据可以选择保存在配置文件中。
2.4 测量方案配置管理
测量方案配置管理包括:
设定显示的窗口数及窗口显示内容,窗口显示内容配置包括:窗口名称、对应测量通道、横坐标选择(转速/频率/时间)、横坐标单位及上限线、纵坐标单位及上限线、滤波参数设定(按数字IIR滤波规范设置滤波器参数)、积分选择、窗函数选择(缺省为Flat Top)、当前有效值显示选择、峰值显示选择、报警上限设定、分析频率带宽、转速1分量显示选择、转速2份量显示选择、主频及主频幅值显示选择、历史记录文件名,如果横坐标选择转速或有转速分量显示要求,需要提供转速获取途径;
按照数字IIR滤波器规范设定滤波器参数;
在做了积分设定后,对应的测量通道是加速度传感器的,积分后纵坐标显示为速度,峰值、有效值、转速分量等均显示为速度,不再显示加速度值;若用户想观察加速度信号,可以新建窗口,选择相应的测量通道,但不做积分设定。对应的测量通道是速度传感器的,积分后纵坐标显示为位移。
选择横坐标为转速,需设定纵坐标显示为峰值、有效值、转速1分量、转速2分量,可以设定振动限制曲线,限制值可以设定为峰值、有效值、转速1分量、转速2分量;
选择横坐标为频率,纵坐标为振动频谱,可以设定显示幅度谱或功率谱,缺省为幅度谱,可以设定按dB还是线性刻度,缺省为线性刻度,可以设定显示主频及主频幅值,可以设定显示振动有效值,可以设定显示转速1分量、转速2分量的对应幅值;
选择横坐标为时间,需设定横坐标单位及上限线、纵坐标单位及上限线,可以显示振动有效值。
报警值可以设定为峰值、有效值、转速1分量、转速2分量,超出设定报警值时对应显示控件闪烁;以上所有配置数据可以选择保存在配置文件中。
2.5 传感器标定
此功能是为了得到传感器的灵敏度系数,方法如下:
用户将被标定传感器放置于标定振动台上,设定标准的一组振动值(峰值或有效值均可),调节振动台到相应的振动值,点击获取键,即得到对应传感器灵敏度系数,可以在多个点获取,最后获得一个平均的灵敏度系数,软件此时应给出该传感器的线性误差,标定结果可以打印。
2.6 转速信号获取
软件可以通过接受外部数据的方法实时获得发动机的转速数据(一般均为双转子发动机,因此有2个转速),该项功能设定后,测量方案配置中的转速1分量、转速2分量、横坐标转速等设置有效。
2.7 振动信号显示及分析
按工具栏运行按钮后软件执行该功能,该功能首先启动数据采集器获取测量数据,然后按照测量方案的设置显示数据。
在窗口内除了显示波形,还需按用户的设定显示振动峰值、有效值、主频及主频幅值、转速1分量的对应幅值、转速2分量的对应幅值;
每个窗口有最大保持功能(以当前通道的振动有效值计算),保留测得的最大振动信号,用户也可取消该项选择;
用户可以随时对所有窗口暂停刷新数据,并对所有窗口的数据打印输出;
用户可以对所有窗口的数据保存记录,并添加到记录文件或数据库中;
用户可以执行停止操作,软件关闭振动信号显示窗口;
用户可以重新设定测量方案,然后再次进入振动信号显示界面,此时振动信号显示窗口的内容按照新方案显示。
2.8 历史记录存储和回放
对于从数据采集器读入的数据,根据用户在测试方案配置中设置是否启动历史记录保存功能,文件名在测试方案设置中提前输入。用户启动振动信号显示分析功能时开始记录所有激活通道的数据,当用户暂停显示时或启动最大保持时,均不影响软件在后台记录历史数据,该历史数据为数据采集器采集到的信号。当用户关闭振动显示窗口时结束历史记录存储。
根据用户选择的历史记录文件回放数据,回放过程用户可以拖动回放进度条选择回放位置,读到历史记录文件尾后程序自动回到历史记录文件头。回放过程可以根据用户重新配置的测量方案进行振动信号分析。
2.9 报表打印
用户可以设计报表数据的模板。根据用户设计的模板加入振动波形,还需按用户的设定显示振动峰值、有效值、主频及主频幅值、转速1分量的对应幅值、转速2分量的对应幅值的信息;用户可以实时打印或在回放数据时打印。
3 振动信号滤波方法研究
由于发动机振动测量需要分析转子引起的振动分量,因此振动测量分析系统还需具备数字跟踪滤波以及窄带滤波的功能。
该项试验目的是对不同方式的软件滤波效果进行研究,并找出最适合的滤波方式。试验方法: 通过安捷伦信号发生器发出扫频频率信号,经过动态信号分析仪的抗混滤波并利用振动分析软件的带通滤波功能显示分析结果。
通过使用信号发生器在0~1 000 Hz扫频试验,研究振动分析软件在常用的发动机振动范围20~300 Hz的的滤波效果,选用的数字IIR滤波器如下表:

表1 滤波器选择表
不同滤波器的实际效果如下所示。
Butterworth滤波器滤波效果如图2。
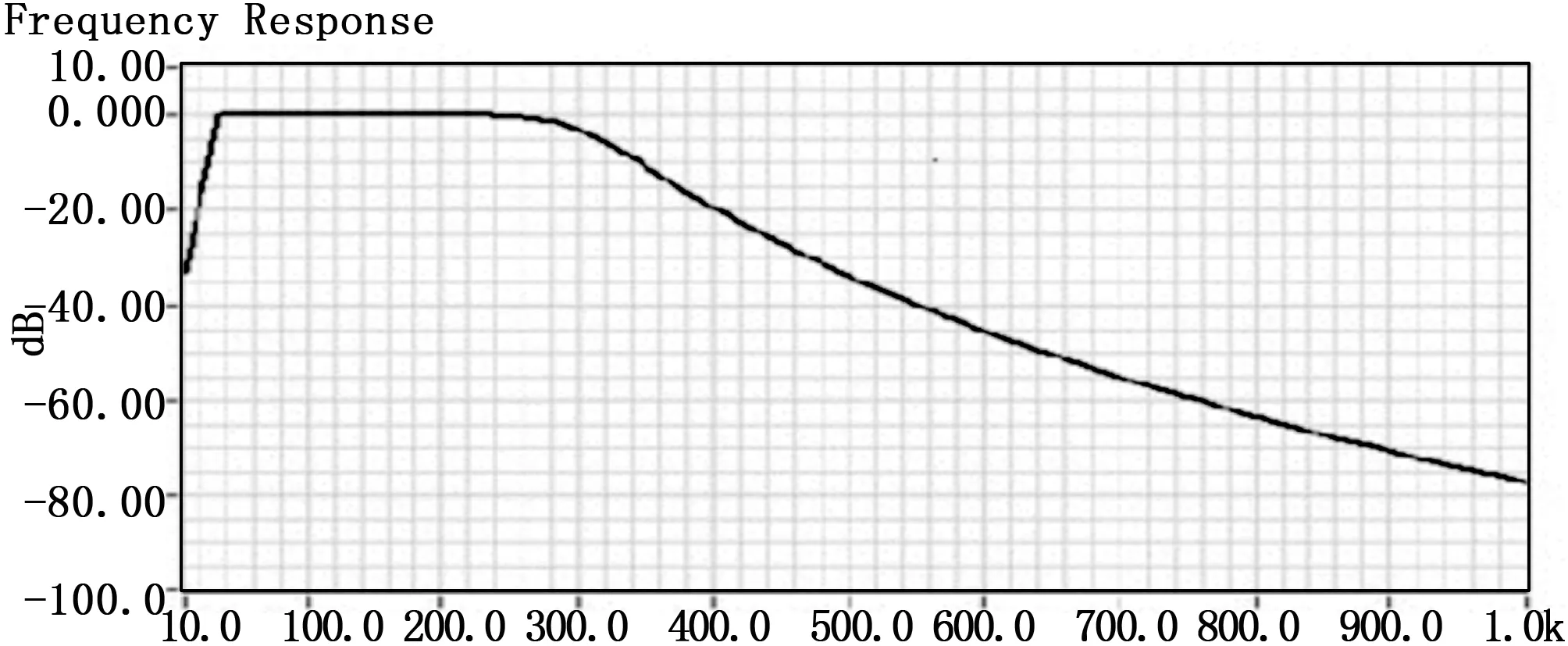
图2 Butterworth滤波器
Chebyshev滤波器滤波效果如图3。
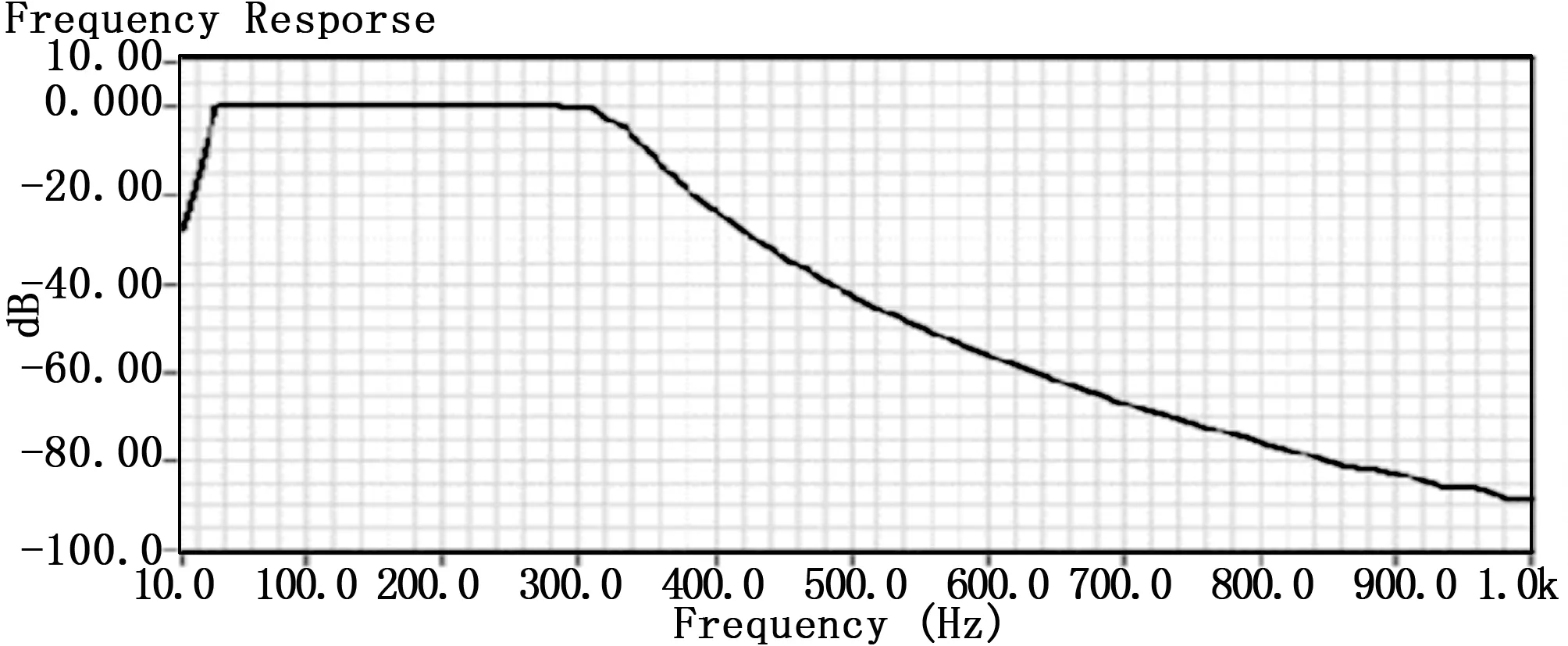
图3 Chebyshev滤波器
Inverse Chebyshev滤波器滤波效果如图4。
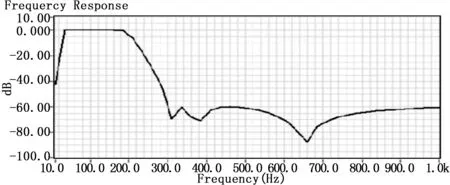
图4 Inverse Chebyshev滤波器
Elliptic滤波器滤波效果如图5。
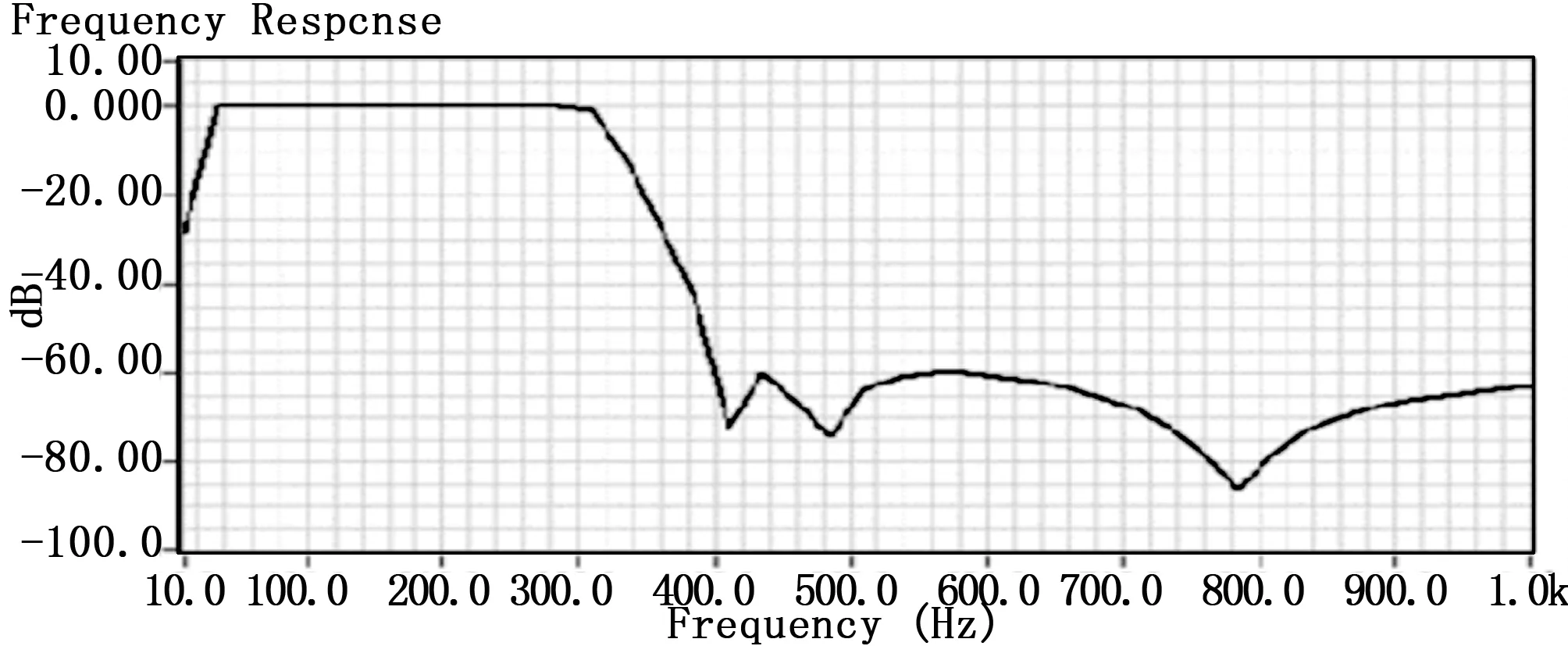
图5 Elliptic滤波器
Bessel滤波器滤波效果如图6。
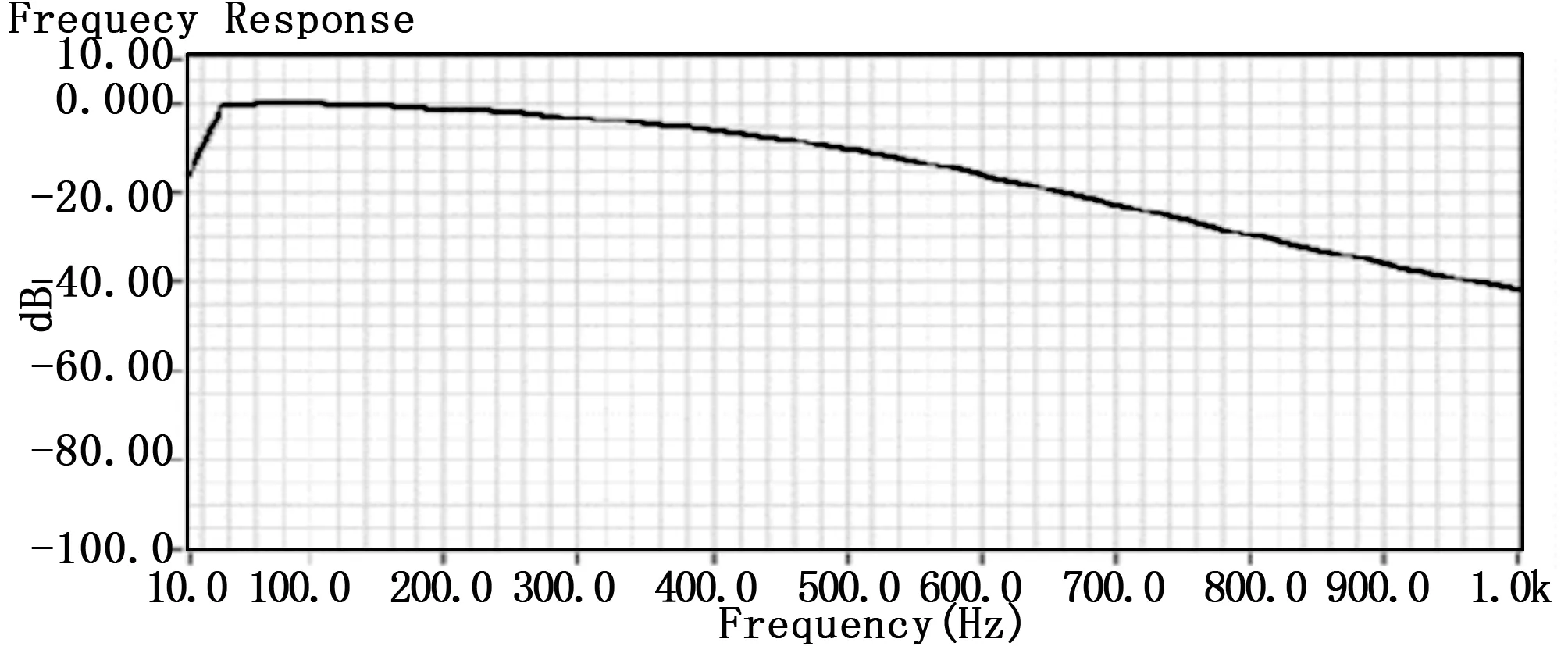
图6 Bessel滤波器
测量结果表明,选用Butterworth滤波器的滤波效果最好,最适合作为实际测量中选用的滤波器,远远超出发动机生产厂提出的通带平滑度≤±5%,阻带衰减大于-30 dB/倍频程的滤波技术要求。
4 幅值谱分析中窗函数的选择
通过振动校验仪固定给出1 g的加速度振动信号,使用加速度传感器进行测量,在幅值谱分析时通过加不同类型窗函数,得出试验结果如表2。

表2 1 g加速度幅值下的测量结果
由试验结果可以看出:选用Flat Top窗可以获取更高的测量精度。
5 试验结果与分析
试验选用比较的传感器为国产的YD611D型加速度传感器、美国PCB公司的HT622A01型加速度传感器以及丹麦B&K公司的4382V型加速度传感器。其中YD611D型加速度传感器、HT622A01型加速度传感器均为ICP型加速度传感器。
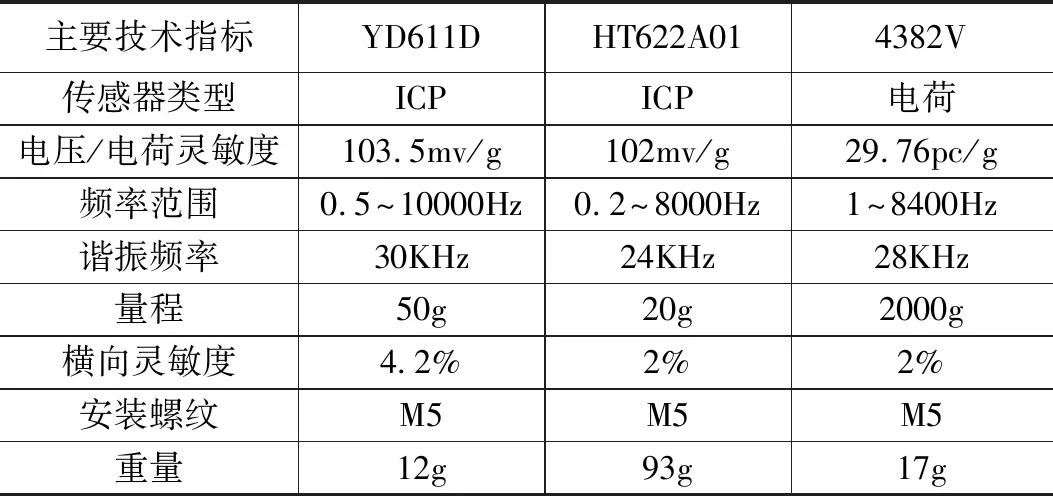
表3 传感器主要技术指标
分别对3种规格的传感器进行标定试验,试验方法分别将3种规格的传感器安装在E5501便携振动校验仪上,启动校验仪,分别测量校验仪发出的1 g标准信号,试验目的验证拟研制的振动测量系统的实时测量功能,以下是3种传感器的试验结果:
YD611D测量结果如图7。
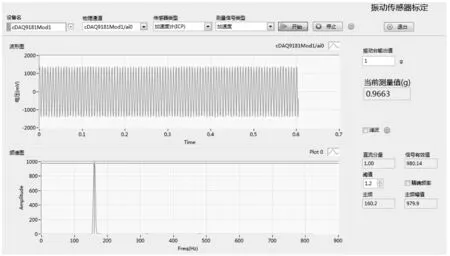
图7 YD611D测量结果
经过E5501便携振动校验仪发出的1 g标准信号,实测结果为0.966 3 g。
HT622A01测量结果如图8。
经过E5501便携振动校验仪发出的1 g标准信号,实测结果为0.995 6。
4382 V测量结果如图9。
经过E5501便携振动校验仪发出的1 g标准信号,实测结果为1.019 5 g。
根据上述试验结果,表明所研究的ICP加速度传感器与压电加速度传感器均能满足GJB5543-2006《航空发动机地面试车台通用要求》关于振动测量精度的要求(<5%)。
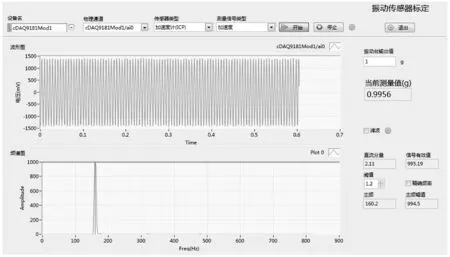
图8 HT622A01测量结果
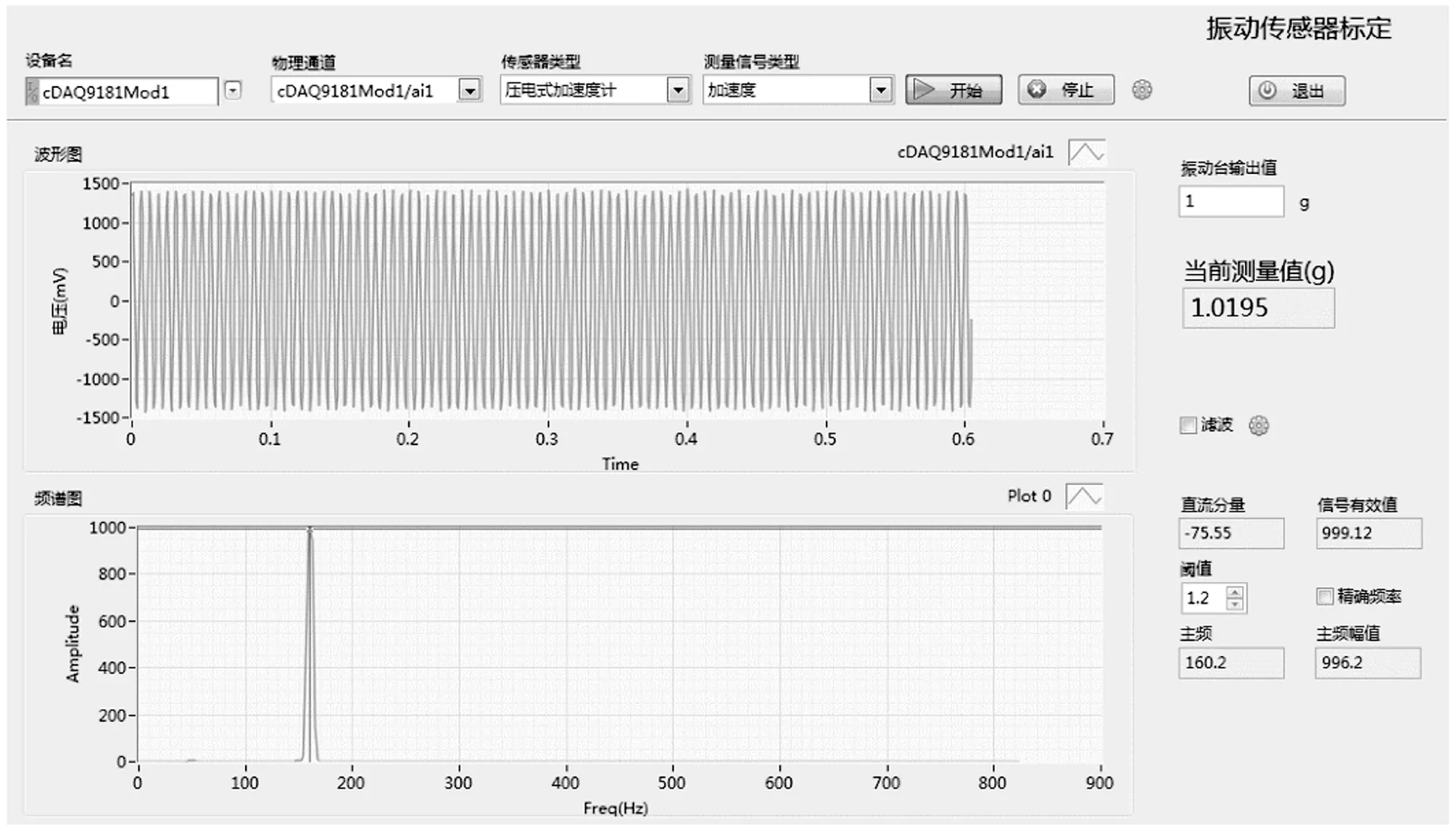
图9 4382V测量结果
6 结束语
通过搭建航空发动机整机振动测量系统硬件及编写振动测量分析软件,对航空发动机整机振动信号的分析方法进行了试验研究,研究表明,发动机整机振动测量建议选择压电式加速度传感器并使用带有抗混滤波的差分放大器以消除频率混叠和共模干扰,在振动分析软件处理中采用Butterworth滤波器和Flat Top窗,试验结果表明,该方法能够满足发动机生产厂提出的通带平滑度≤±5%,阻带衰减大于-30 dB/倍频程的滤波要求以及对振动测量精度≤±5%的要求。本文提出的航空发动机整机振动测量方法准确可靠,能够满足发动机厂、所对试车台架整机振动测量的要求。