基于电驱动的地面无人装备机动技术发展研究
2019-05-23纪伯公
袁 东, 纪伯公, 张 杰
(1. 陆军装甲兵学院兵器与控制系, 北京 100072; 2. 陆军装甲兵学院科研学术处, 北京 100072)
随着军事科技的迅猛发展和军事变革的持续推进,陆基装备逐步向信息化、智能化、无人化方向发展,地面无人装备成为未来陆战场的战略前沿和发展热点[1-4]。与有人装备相比,地面无人装备在执行高危险、高重复、超越人体生理极限的任务等方面具有独特优势:在时域上,能够长时间(从以小时计算,到以天、月,甚至以年为任务周期)、高强度、持久高效地执行各种作战和勤务保障任务;在地域上,能够到达和适应传统装备或人员难以到达和适应的复杂地形(如陡崖、窄缝、洞穴等)、危险区域(如雷场、生化污染地带等)和极端气象环境(如极寒、高海拔地域等)。同时,地面无人装备不受有人装备乘员的心理极限因素影响,在任何情况下都能“一往无前、毫不畏惧”地坚决执行任务,并能减少人员伤亡。因此各军事强国都在不断加大地面无人装备的研发力度和运用实践。目前,地面无人装备已在侦察感知、指挥控制、机动突击、火力打击、后勤保障和核生化探测等诸多战术行动中发挥着重要作用,特别是经过近几次局部战争的实战运用,其作战效能和独特优势已引起高度关注。
随着地面无人装备使命任务的不断拓展和功能的多样化,其机动能力要求也在不断提高。机动平台是无人装备任务载荷的承载者,也是实现达成作战任务的基础[5]。如何快速、隐蔽、准确地到达各种复杂地域,并能够根据使命任务要求完成相应的战术机动动作,是地面无人装备机动技术研究的核心问题。笔者从地面无人装备机动性能需求出发,探讨采用电驱动实现无人装备机动的技术特点与主要研究内容,为进一步提高其机动性能提供参考。
1 地面无人装备机动性能需求
1.1 地面无人装备发展概况
20世纪30年代,前苏联开始了无线遥控坦克的研发[3],在二次世界大战期间德军也研发出了无线遥控履带车辆,这些早期的地面无人装备由于受环境感知、运动规划、跟踪控制等相关技术的限制,均采用遥控方式。20世纪80年代以来,美、英、法、德、俄、日、韩等国相继启动了多项研究计划,开展了地面无人装备的关键技术与作战运用研究,并取得了大量研究成果。
总体来看,在自主化程度方面,逐步由遥控型向半自主、自主型发展[1,6]。其中:遥控型地面无人装备技术较为成熟并大量列装,如美国的Recon Scout Magnetic无人车、“帕克博特”(Packbot)系列无人车、“魔爪”(Talon)系列无人车、“安德罗斯”(Andros)无人车、“粉碎者”(Crusher)无人车等,德国的“清道夫”2000扫雷车、TelMAX排爆机器人、tEODor无人车,英国的“独眼巨人”(Cyclops)系列无人车、“手推车”(Wheelbarrow)系列、Armtrac400扫雷无人车,法国的Cameleon无人车、TSR202无人车、AMX-30B/B2 DT扫雷无人车,以色列的VIPeR无人车,俄罗斯的“天王星-9”(Uran-9)无人车、“平台-M”(Platform-M)无人车等;半自主型地面无人装备也取得了突破性进展,并有部分列装,如美国的班级任务保障系统(Squad Mission Support System,SMSS)、以色列的“先锋”(AvantGuard)无人车等,还有多个项目正处于研发阶段;自主型地面无人装备研发项目也不断启动,如美国的自主平台演示样车(Autonomous Platform Demonstration,APD)、越野机器人感知技术演示项目,法国的自主式快速运动侦察车等。
在功能集成方面,由单一功能向多功能综合化发展。早期的地面无人装备大多是单一功能的专用装备,如无人侦察装备、无人扫雷车或者无人运输车。随着战场需求的不断变化,要求地面无人装备功能要逐渐向综合一体化迈进,从而使其具有多种用途,一台装备往往能够同时拥有侦察、打击、指挥、控制甚至保障方面的多重能力,且逐步呈现出“通用机动平台+专用任务载荷”的系列化发展趋势。
从实战运用方式来看,地面无人装备逐步由支援保障功能向作战功能拓展[7]。在科索沃作战中主要用于扫雷任务,如“黑豹”(Panther)系统、Mini-Flail扫雷装置;阿富汗作战中拓展到多项后勤支援保障任务,如采用“帕克博特”(Packbot)系列无人车和“魔爪”(Talon)系列无人车进行爆炸物探测和处理,洞穴搜索等任务,采用SMSS运输装备和补给;在叙利亚作战中,俄军采用“平台-M”(Platform-M)无人车和“暗语”地面武装平台与无人机协同,直接参与进攻作战。
国内地面无人装备技术研究也取得了长足的进步,相关高校和科研机构研制出了多种不同用途的地面无人平台[1]。近年来,连续进行的几届“跨越险阻”陆上无人系统挑战赛有力推动了相关技术领域的发展。
1.2 地面无人装备的主要型谱
随着相关技术领域的不断进步和装备研究的不断深入,地面无人装备的使命任务领域还将不断拓展,未来可能遍及战场抵近侦察监视、精确引导与毁伤评估、火力打击与特种作战、扫雷爆破与防化作业、无人值守与巡逻警戒、物资运输与伴随保障、战场救护与装备抢修等诸多领域[8-9]。郝为利等[2]根据地面无人装备使命任务需求,结合相关领域关键技术发展水平,按照无人装备重量,构建了地面无人装备发展的主要型谱,由微小型、小型、轻小型、轻型、中型和重型等6种类型构成。各型谱无人装备一般均具备自行机动执行任务的能力,但根据其重量和尺寸不同,运输(或携行)部署方式有所区别,所搭载的任务载荷与使命任务也不尽相同,如表1所示。
1.3 机动部署能力需求及其主要评价指标
机动是地面无人装备遂行各种任务的基本条件,从其使用条件来看,地面无人装备面临大量的不规则路面,例如:在野外战场,路面基本上是不规则土路、泥泞道路或者崎岖山路;城市作战中,往往要面临高楼倾塌、公路塌陷、弹坑和废墟阻滞等环境;对于执行班组伴随保障任务的无人装备来说,还需随单兵通过台阶、壕沟、陡崖、丛林等复杂地形。此外,对于执行特种任务的微小型、小型与轻小型无人装备,由于其外形尺寸相对较小,也给其机动性特别是通过性带来了更大的挑战。随着使命任务的不断拓展和功能的多样化,地面无人装备机动能力要求还会不断提高[10]。

表1 不同类型无人平台的任务载荷与使命任务
需要说明的是,机动能力的提高不仅能够增强地面无人装备的环境适应性,同时还可以减轻其环境感知和路径规划的负担;此外,具备高机动能力可以使其采用捷径或者更为隐蔽的路线到达任务区域,提高达成任务的快速性和隐蔽性。具有高机动能力的无人装备还能通过灵活的战术规避动作躲避威胁,在一定程度上提高自身的战场生存能力。
地面无人装备机动性能通常用快速性、通过性、灵活性和续航能力等指标来衡量[11-14]:
1) 快速性。常用的评价指标有最大速度、公路平均速度、越野平均速度,两栖无人装备还有最大航速等。
2) 通过性。包括爬坡能力、越障能力、涉水能力、软地面通过能力等。常用的评价指标有最大爬坡度、最大侧倾行驶坡度、过垂直墙高、过断崖高、过崖壁高、越壕宽、涉水深等,软地面通过能力常用通过地面时的平均接地压力来衡量。
3) 灵活性。包括加速性、转向性和制动性等。常用的评价指标有加速时间、制动距离、最小转向半径等。
4) 续航能力。常用的评价指标有最大行程、连续工作时间等。
考虑到部署方便,地面无人装备还需满足可运输及携行能力要求(如铁路输送、公路输送、航空输送、水路输送、空投要求等)小型、微小型无人装备还需具备伴随班组和单兵携行要求。此外,根据搭载任务载荷的不同,通常还需满足一定的平顺性要求。
2 地面无人装备典型的机动方式
目前,地面无人装备的典型机动方式主要有轮式机动、履带式机动、足式机动以及由这3种方式组合而成的混合式机动,如轮履混合式、轮足混合式和履足混合式等[15]。
2.1 轮式机动
轮式机动具有机动速度快、行驶效率高、噪声小等特点[16],在重型、中型、轻型、轻小型等多种型谱的地面无人装备中都有广泛应用。图1为几种典型的轮式无人装备[17]。
其中:“粉碎者”(Crusher)无人车动力系统为发动机与锂电池组成的混合动力系统,采用基于轮毂电机的全轮驱动型式,同时安装有硬度和高度均可调节的悬挂装置,最大速度42 km/h,最大爬坡度>40°,越障高>1.2 m,越障宽2.03 m;多功能通用/后勤装备(Multi-function Utility/Logistics Equipment,MULE)无人车也采用轮毂电机驱动,且车轮与独立铰链式车轴相连,构成独立悬挂装置,能够实现车辆姿态调整,其最大侧倾行驶坡度超过40°,同时具备车轮/车轴受损情况下采用5个甚至3个车轮应急行驶的能力;“狼牙棒”(Mine Area Clearance Equipment,MACE)无人车采用4×4全轮电驱动与全轮转向技术,最大速度80 km/h,最大爬坡度可达到45°。
2.2 履带式机动
较之轮式机动方式,履带式机动虽然机动速度和机动效率受限,但是道路适应性和牵引附着性能好,越野机动能力、爬坡能力、软地面通过能力和越障能力强,同时可实现原地或中心转向,转向半径小,其应用场合基本遍及地面无人装备的各个型谱。图2为几种典型的履带式无人装备[17]。
其中:“魔爪”(Talon)无人车采用电机驱动方式,最大爬坡度48°,转弯半径1.04 m,底盘自重62 kg,机械臂抓举重量可达32 kg;“剑”式无人车在“魔爪”(Talon)无人车基础上进行了改进,可进行侦察和武装攻击;“粗锯齿”(Ripsaw)无人车采用Baha越野型履带式悬挂系统,最大速度甚至达到112 km/h,越障高0.96 m,最大爬坡度50°,具有优良的加速性、制动能力和全地形通过能力。
2.3 足式机动
足式机动是为了适应山地、丛林等复杂地形中执行作战任务而设计的,其设计源于仿生学,足式机动平台的出现丰富了地面无人系统的装备类型。与轮式、履带式机动方式相比,具有可任意选择着地点进行移动的优点,能够完成各种非结构环境下的作战和保障任务,可扩展部队作战空间和提高作战效能,是新型作战力量构建的重要载体[6,16,18],但足式机动的速度一般不会太快。目前,足式机动主要应用于轻小型无人装备,图3为2种典型的足式无人装备。
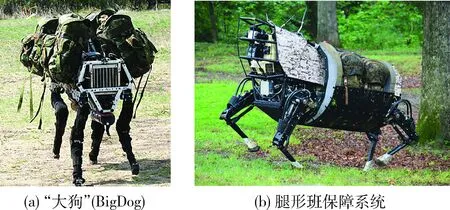
图3 2种典型的足式无人装备
其中:“大狗”(BigDog)机器人是为了通过极端地形而设计的,最大速度6 km/h,最大爬坡度35°,涉水深0.6 m,具有缓行、步行、小跑和快跑等多种运动模式;腿形班保障系统长度比“大狗”增加1倍,高度增加3/4,可在崎岖和多石地形上快跑,计划最终实现平地运动速度为11 km/h。
2.4 混合式机动
在作战运用过程中,地面无人装备通常要面临多种不同的地形环境,因此单一机动方式往往难以满足高机动要求。混合式机动的目的是为了综合各种机动方式的优点,根据不同的地形环境,在轮式、履带式、足式3种机动方式之间切换,如美军的GXV-T项目中研制的可重构轮轨(如图4所示),可在车辆行驶过程中实现圆形车轮与三角履带的快速转换,从而提升其在不同地形的战术机动性[19]。

图4 可重构轮轨
吕海洋等[20]设计了一种关节式轮履混合机动平台,可实现轮式机动和履带式机动间的切换,具有良好的环境适应性和越障能力,可应用于侦察、探测等领域;杜微等[21]设计了一种履足混合机动平台,并进行了仿真分析;轮式机动与足式机动也有多种结合方式,总体上可分为轮足耦合式和轮足组合式,前者主要是将腿和车轮的功能融合设计在一起,从而使车轮同时具有足式机动的功能,如无框轮辐条驱动轮、旋转外行星轮臂以及可转换变结构轮等,后者是将轮和足2种运动机构在机械上进行独立组合与集成,如关节式轮足混合型式、轮足分离型式、主动适应悬挂型式以及多自由度集体铰接型式等[22-23];段星光等[24]还设计了一种具有轮、履、足多种运动模式的复合式移动机器人,其可以实现轮式高速运动、履带或足式越障等多种模式的运动。
3 基于电驱动的无人装备机动技术
3.1 电驱动的优势与特点
较之传统机械传动系统,采用电驱动实现地面无人装备的平台机动,具有如下优点:
1) 机动性能好,环境适应性强。电驱动系统具有动态响应速度快、加速性能好、过载能力强等特点;同时其控制更加灵活,能够实现双重转向、机电复合制动及能量回收等控制[25],可提高机动性能和能源利用效率,增大续航里程。此外,如前所述,对于采用全轮独立驱动的电传动系统来说,驱动力执行机构的冗余度增加,即便出现个别驱动轮故障,平台仍然可以依靠剩余驱动轮完成行驶,从而提升了地面无人装备的战场生存能力。
2) 整车布局方便,行走机构设计灵活。电驱动系统采用电路柔性连接取代传统的机械连接,各部件的布置更加灵活,装备布局与功能重构相对容易,可增强满足多样化战争行动的能力。同时,柔性连接可有效降低对行走机构的设计约束,为悬挂、转向等系统的变革提供了条件,可为催生和发展更多高适应行走机构奠定技术基础。
3) 能量形式统一,任务载荷承载能力强。采用电驱动时,整车以电能作为基本能量源,综合运用变换、传输、控制等技术,既可用于机动,也可为搭载的任务载荷供电,对武器、防护等作战广谱功能模块具有较强的承载能力,可为更多新型高能侦察、打击系统的应用集成提供能源支撑。
4) 可静音行驶,隐身能力好。在特殊作战任务下,可关闭发动机,采用储能系统给驱动电机供电,实现静音行驶,可大幅降低车辆的噪声以及红外特性,有利于达成任务的隐蔽性和突然性。
5) 可测试性强,维护保障难度小。系统内部状态信息获取方便,可测试性设计好,在线故障诊断方便,同时其系统结构简单、可靠性高、维护保养方便。
3.2 关键技术
3.2.1 高适应行走机构及其运动控制技术
高适应行走机构是实现地面无人装备高机动的物理基础,对于不同型谱的无人装备,由于其自身特点与作战需求区别,其电驱动行走机构的结构模式与运动控制方法也不尽相同。盖江涛[26]针对重型履带车辆,研究了一种双侧电机耦合驱动结构方案,并提出了双电机解耦与电子机械协调差速转向控制策略;曾庆含等[27]针对轻型履带车辆,提出了基于“双侧主动轮驱动+负重轮辅助驱动”的结构模式(如图5所示),即在双电机驱动两侧主动轮的基础上,利用电驱动的柔性连接优势,在负重轮轮毂内集成了驱动电机,实现主动轮+负重轮的协同驱动,在一侧履带损毁情况下,依赖负重轮的动力输出,可以实现应急跛行,显著提高了车辆的机动性能和战场生存能力。

图5 “双侧主动轮驱动+负重轮辅助驱动”结构模式
文献[28-29]作者针对小型履带移动平台,结合Mecanum轮和传统履带式移动机构的结构原理,提出一种新型全方位移动机构——全方位移动履带,并设计了一种履带式全方位移动平台,可实现横向运动、斜向45°运动、中心转向、横向复合转向和纵向复合转向,同时对复杂路面具有较强的适应能力,其结构模式如图6所示。
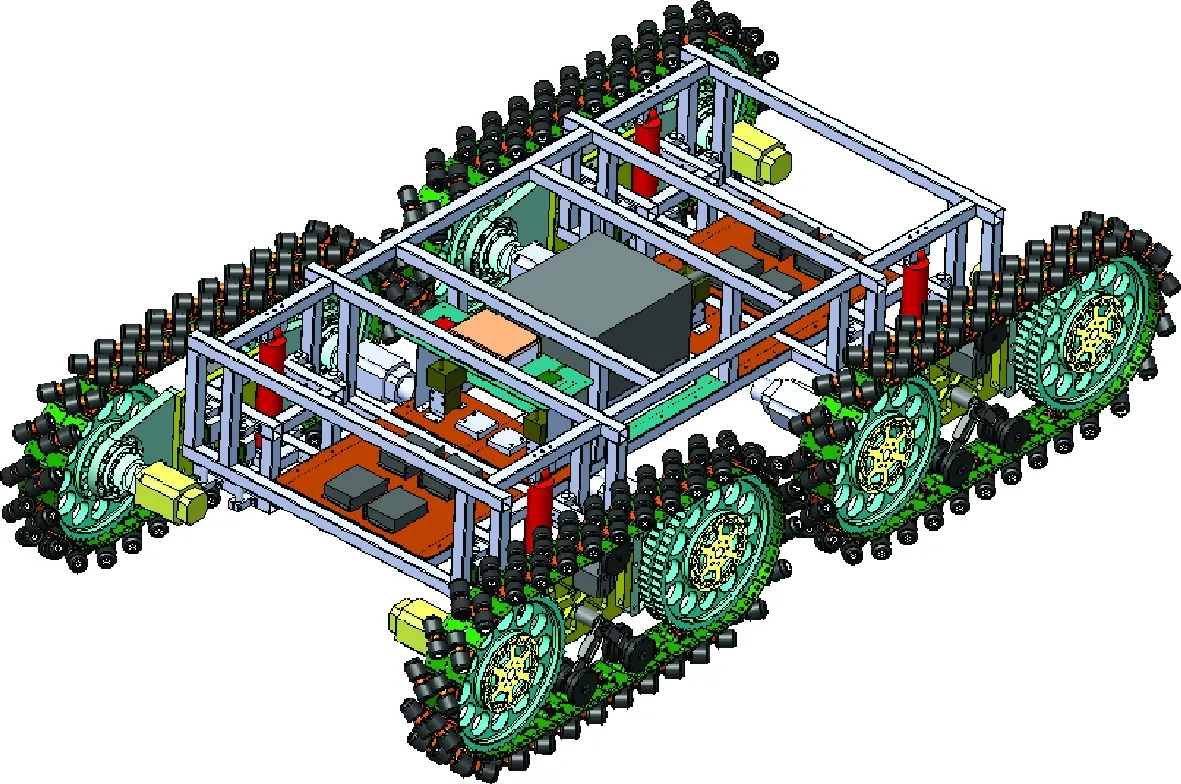
图6 全方位移动履带平台结构模式
黑沫[30]针对非结构化复杂环境下的机动需求,研究了一种基于平行四边形机构的可变形履带式无人平台,并对其直线行进、转向运动和爬坡稳定性进行了分析。
在轮式平台电驱动方面,采用轮毂电机驱动成为重要的发展方向。如:GXV-T项目研制出采用高功率密度永磁同步电机、变频器和行星变速机构组成的轮毂电机驱动系统样机,同时采用多模式极限行驶悬挂(Multi-mode Extreme Travel Suspension,METS)技术,保证车辆在崎岖地形上高速行驶时保持水平状态[19];“粉碎者”(Crusher)无人车、MULE无人车等均采用轮毂电机驱动;杨贵兵[31]以8×8轮毂电机驱动车辆为研究对象,以提高车辆行驶稳定性和低速灵活性为基本目标,开展了车辆状态参数估计、车辆稳定性分析及运动跟踪控制、基于多层次优化的转矩协调控制等研究。此外,仿生机动机构、行走步态规划等研究也不断拓展,行走机理、腿关节机构、步态生成与控制、足端脚力分配、行走能耗优化等方面的探索不断深入[1,23,32]。
总体来看,电驱动行走装置朝着紧凑型、集成化、轻量化、多样化方向发展;同时,运动控制策略研究的不断深入对机动性能的提高具有越来越重要的作用。
3.2.2 多能量源复合电力系统及其能量管理技术
优良的能源供给能力是实现高机动的重要保障,不同型谱无人装备的重量与机动要求不同,其车载电力系统的供电体制与结构体系也各不相同。对于轻型、中型、重型地面无人装备,一般采用多能量源复合结构的车载电力系统[1,33],如:美国国家机器人工程中心(National Robotics Engineering Center,NREC)研制的自主平台演示样车APD、“粉碎者”(Crusher)无人车,爱沙尼亚Milrem公司研制的模块化地面无人车TheMIS,乌克兰研制的“幽灵”2(Fantom-2)多用途无人车等。黄千等[34]分析了以发动机-发电机组为主电源,动力电池直接挂在直流母线上,二者并联作为复合电力系统输出电能的供电特性;邹渊等[35]研究了一种基于随机动态规划的混合动力履带车辆能量管理策略;李军求等[36]提出在动力电池与直流母线之间增设DC/DC变换器实现电气解耦,并研究了一种基于发动机负载跟随与动力电池功率补偿的能量管理策略;董玉刚等[37]进一步讨论了发动机-发电机组的控制策略;马晓军等[38]提出了一种基于多驱动特性能量源的车载综合电力系统,其原型结构如图7所示。系统采用发动机-发电机组作为主能量源,通过脉宽调制(Pulse Width Modulation,PWM)整流器与直流供电网络连接,辅助能量源采用动力电池与超级电容复合储能结构,动力电池通过双向DC/DC变换器与超级电容并联到直流网络。这种复合储能结构有效结合动力电池高能量密度和超级电容高功率密度的特点,提高了系统负载适应能力。同时,由于发电机和动力电池与直流网络之间都有可控功率变换装置,2个能量源可实现解耦控制。
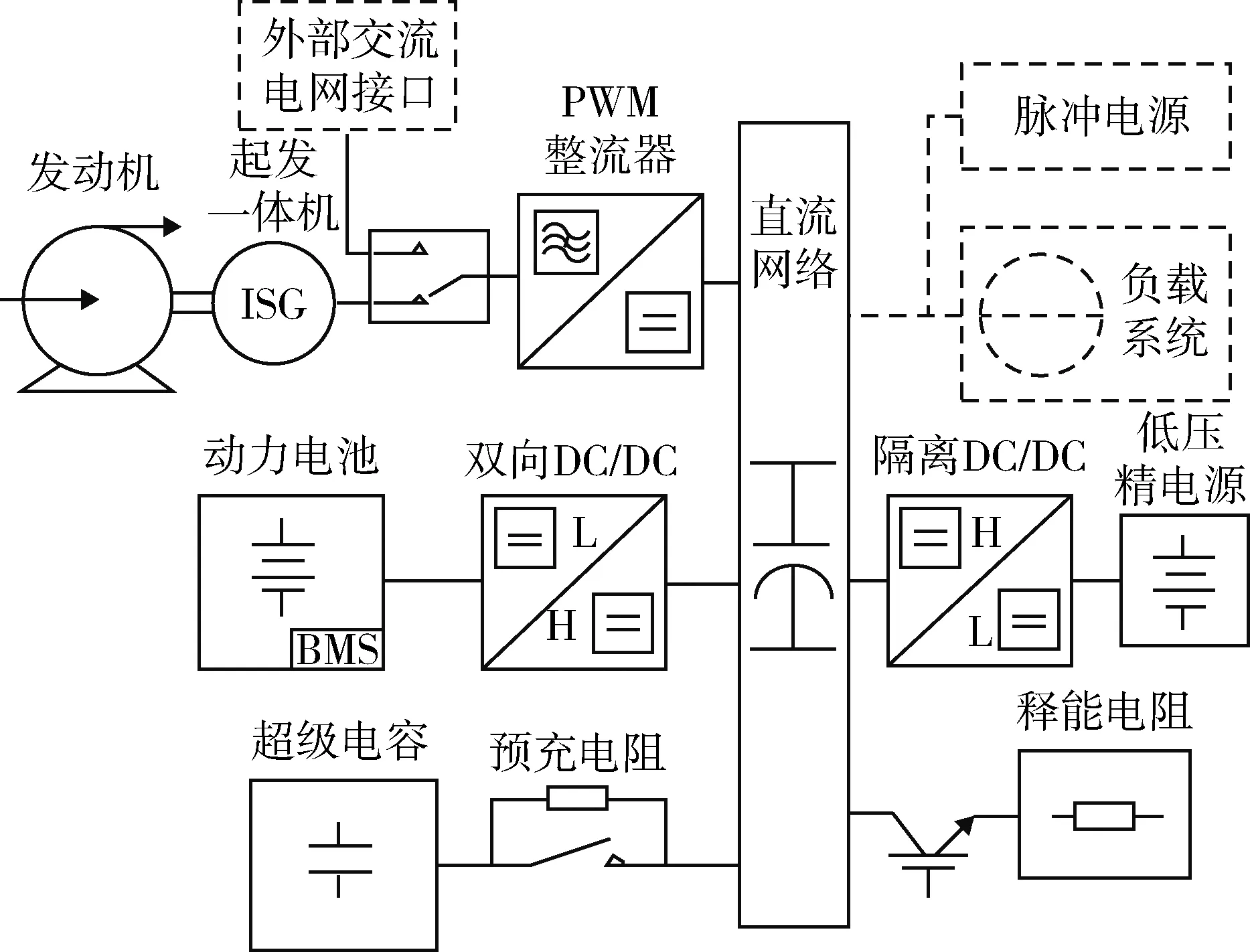
图7 综合电力系统原型结构
刘勇等[39]研究了供电体制与电源系统、输配电系统以及任务载荷之间的关系,提出了不同型谱、不同吨位全电车辆供电体制论证设计方法。
受动力电池能量和功率密度限制,采用动力电池独立作为能量源的供电模式一般主要用于微小型和小型地面无人装备,如美国Roboteam公司研制的PROBOTV2地面无人车。对于执行长期无人值守任务的地面无人装备还可考虑采用光伏发电实现长时间持续供电。此外,燃料电池、新材料电池、飞轮储能电池、超导储能与发电等技术及其车载化应用的进程也在不断加速。
3.2.3 高功率密度电机与功率变换技术
驱动电机及其功率变换装置是实现机动的核心部件,特别是对于中型、重型地面无人装备来说,其功率需求大,性能要求高,体积、质量约束苛刻,较之普通工业用电机驱动系统,具有高性能、高功率密度、高可靠性与高环境适应性等特点[26]。如:在额定转速以下要求驱动电机大扭矩输出,以满足车辆加速、爬坡要求;在额定转速以上又要求其弱磁能力强,最高转速高,以满足车辆最高机动速度要求。即要同时满足高转速和高转矩,又受到体积和重量的限制,它的角功率密度可达到普通电机的4~10倍之多。此外还需要实现全转速范围内效率最优化,以提高续航里程,同时减小损耗,降低散热难度。
李俊龙[40]针对电驱动系统中的轮毂电机应用需求,分析了恒功率运行约束下电机的设计方法、涡流损耗、电机转矩波动及其抑制方法;宫海龙[41]分析了高转矩永磁轮毂电机的磁系统特性,研究了电机转矩波动与振动特性;盖江涛等[42]针对基于永磁同步电机的车辆驱动系统在负载变化过程中转速受到较大影响的问题,设计了基于负载观测的二阶自抗扰控制器(Active Disturbance Rejection Controller,ADRC),实现系统速度控制,提高了动态稳定性能和响应能力;李敏裕[43]针对军用车辆驱动系统高功率密度需求,开展了基于T型逆变器的永磁同步电机三电平驱动控制技术研究。
对于足式机动装备来说,关节电机驱动系统需具备转动惯量小、响应速度快、执行机构灵活、驱动力矩大、抗冲击能力强等要求,以提高其机动能力与环境适应性,同时要满足关节安装空间位置和质量限制。盛沙等[44]设计了具有复合运动模式的耦合驱动关节,提高了电机驱动能力和效率。
此外,电机驱动系统的电磁兼容性也是电机与功率变换装置研究的重要内容。一方面,驱动电机功率大,功率变换装置基本均采用PWM控制方式,开关频率高,且安装密集度高,容易产生电磁辐射,对控制系统产生干扰;另一方面,地面无人装备遂行任务时需要大量的通信与控制链路,本身就处于一个极端复杂的电磁环境,它们也会对电机驱动系统产生影响[45]。因此,电机驱动系统设计时需从供电特性、接地特性、安装方式、匹配设计、滤波与屏蔽设计等多方面入手,提高系统的电磁兼容性。
4 结论与建议
随着电机控制、电力变换以及新型能源等相关技术领域的进步,电驱动将成为地面无人装备的理想驱动方式,具有广阔的应用前景,需要加强深入研究,以适应未来装备发展需求。具体建议如下:
1) 加强顶层设计规划论证。以作战需求为牵引,开展任务需求、功能配置与技术形态的一致性转化研究,规划论证不同型谱无人装备的机动平台技术体系和发展路线。规范不同吨位和功率等级无人装备的供电体制、能源型式、驱动模式等,注重“基型+变型”的发展模式,促进基于电驱动的机动平台标准化、通用化、系列化。
2) 加强基础理论与重难点技术环节攻关。梳理电驱动机动平台的关键技术体系,制定高适应性行走机构、高功率密度电机以及运动控制等关键技术的近期和中长期技术发展目标,构建“关键技术突破、典型装备研制、前沿技术探索”相结合的协调发展模式。重视关键器件、结构材料、制造工艺等方面研究,不断推动电驱动系统的轻量化、集成化、高效化发展。
3) 深度推进融合式、创新式发展。充分吸收装甲车辆电传动、民用电动汽车等相关技术领域成果,注重传统有人装备,特别是老旧装备底盘的无人化改造,探索基于电驱动系统的无人化改造和直接在传统推进系统中加装自动操纵机构进行无人化改造等多条技术途径。促进燃料电池、超导储能、功率变换等民用相关技术的移植转化,避免重复研发,降低技术风险,促进地面无人装备稳步、高效发展。
