基于二维DFT变换的调频引信信号处理方法
2019-05-15李楚宝袁久兴任俊峰李新文
李楚宝,黄 辉,袁久兴,任俊峰,李新文
(西安机电信息技术研究所,陕西 西安 710065)
0 引言
近些年来随着武器装备的发展,针对于无线电调频引信高精度分档定高以及抗干扰方面的需求也日见突出,通过对差频信号中相对运动目标进行距离-速度联合估计的信号处理方法,能有效实现高精度分档定高以及抗干扰处理。抗干扰处理包含了在干扰条件下不误动作及在干扰条件下能够进行定高两方面内容,通过距离变化-速度比对能够在大部分干扰条件下实现干扰信号的识别,当有效获得距离-速度信息时可以通过估计的方法在干扰时进行高度估计实现干扰条件下的定高,关于抗干扰处理方面内容的本文不做详细论述。
传统无线电调频引信的信号处理方法多采用一个或两个固定的距离通道上的多普勒信息进行定距处理,该方法不能进行距离-速度联合估计[1-2]。文献[3]介绍了利用锁相环技术实现高精度大范围测距的方法,但该方法不能提取差频信号中的多普勒信息,不能实现距离-速度联合估计。文献[4]介绍了利用不同时间段差频和多普勒信号进行混频抑制调频引信多普勒信号的方法,该方法不能实现距离-速度联合估计。文献[5]介绍了利用采用分数阶傅里叶变换实现小调制带宽高精度测距的方法,该方法同样不能实现距离-速度联合估计。上述文献中介绍的调频引信信号处理方法均不能解决无线电调频引信差频信号中运动目标距离、速度信息连续同时测量的问题。本文针对无线电调频引信信号处理难以解决连续同时获取目标距离、速度信息的问题,提出了基于二维DFT变换的调频引信处理方法。
1 无线电调频引信及二维DFT变换
1.1 无线电调频引信
无线电调频引信由于结构简单、距离截止能力强易于实现,广泛用于无线电引信系统,其原理框图如图1所示。
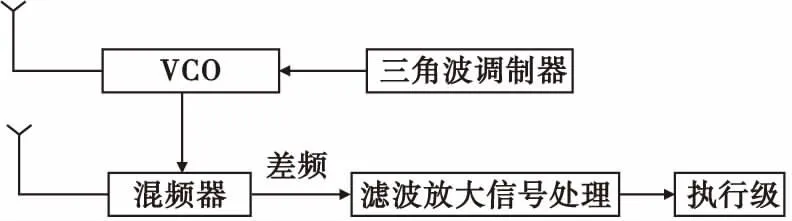
图1 三角波调频多普勒引信原理框图Fig.1 Principle block diagram of triangular wave FM doppler fuze
根据图1的原理框图可以得到三角波调频差频的瞬时相位[6-8]关系为式(1),图2为差频信号瞬时频率示意图。
(1)
式(1)中,ω0为载频,α=2πΔfm/Tm为调制斜率,Δfm为调制频偏,Tm为调制周期,Ed为差频信号幅度(同目标距离、目标的后向散射系数,接收增益有关),τ=2r/c为目标到引信探测器之间的延迟时间,r为目标到引信探测器之间距离,c为光速。
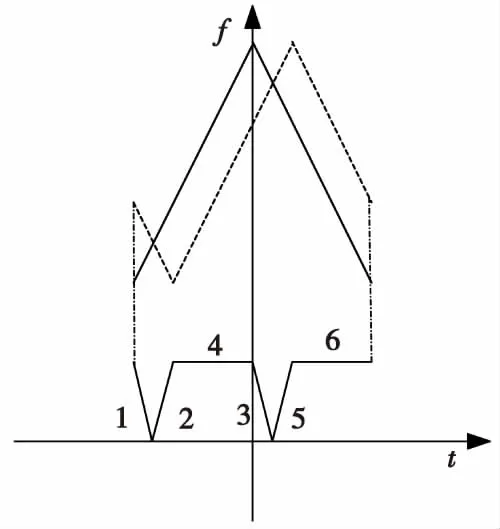
图2 三角波调频差频时-频关系Fig.2 Time-frequency relation of triangular wave FM difference frequency
1.2 二维DFT变换
二维DFT是对二维矩阵进行离散傅里叶变换,设f(x,y)是在空间域上等间隔采样得到的M×N的二维离散信号,x和y是离散实变量,u和v为离散频率变量,则二维DFT变换对一般地定义为:
u=0,1…,M-1;v=0,1…,N-1
(2)
2 无线电调频引信二维DFT变换原理及步骤
三角波调频差频信号中存在着运动目标的距离信息及运动信息(多普勒信息),为了方便描述我们引入快时间、慢时间的概念,并对式(1)进行快、慢时间的变换和推导得出在不同时间尺度描述条件下差频瞬时频率的特性。快时间对应的是一个调制周期内的时间,表征的是调制周期内的距离信息。慢时间为不同调制周期对应的时间,表征的是运动信息(多普勒信息),根据式(1)增加快、慢时间参数可得到式(3):
(3)
图2中1,2,4,5部分频率在快时间内是变化的,称为不规则区,通常情况下不规则区的时间很短一般进行忽略,分别对3,6部分相位求导可以得到差频在快时间-慢时间描述下的瞬时频率。
差频的瞬时频率:
(4)
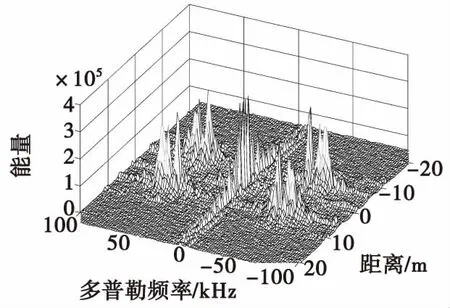
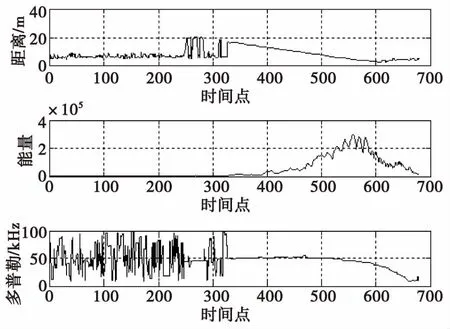
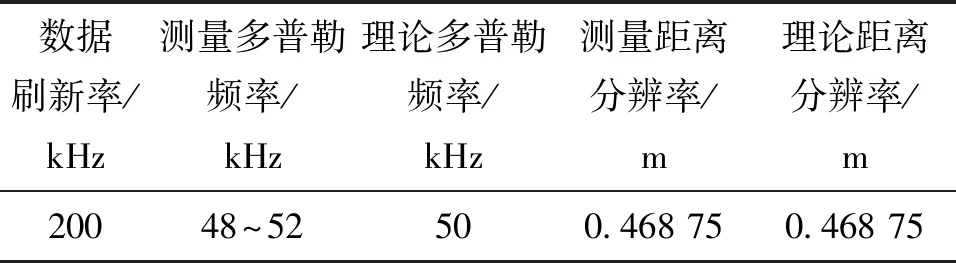
式(4)中,λ为中心频率对应的波长,V为目标的运动速度,4Δfmr(tn,Tn)/c为差频中距离频率,2V/λ为差频中的多普勒相位,φ1(tn,Tn)=V(αTm/2+2αtn-2ατ)/πc为剩余相位,φ2(tn,Tn)=V(2αtn-2ατ-αTm/2)/πc为剩余相位,且|φ1(tn,Tn)| 对差频信号进行二维DFT变换的基本原理就是利用差频信号包含的目标距离速度信息通过二次DFT变换分别对距离维和速度维的进行提取,该过程等同于对差频信号一维信号空间域变换成二维信号后进行二维离散DFT变换。 设差频一维信号为[Ud(t1,T1),…,Ud(tM,T1),…,Ud(t1,TN),…,Ud(tM,TN),…],其中,M为离散采样数据,N为调制周期。 差频信号的二维DFT变换具体步骤如下: 1)将一维差频信号M×N长度的数据变成二维离散矩阵: 2)对二维离散矩阵采用式(2)进行二维DFT变换得到一个二维复信号矩阵: 3)对Y的元素求模,|y(ui,vj)|为距离vj、多普勒频率ui对应的能量: 4)重复对一维差频信号进行步骤1),2),3),可以得到不同时刻,不同距离对应的多普勒信号的能量。 为了验证基于二维DFT变换的调频引信信号处理方法能够利用调频引信差频信号进行动目标距离-速度联合估计,利用K波段调频探测器进行运动目标的目标特性测试,通过数据记录仪进行数据采集,使用Matlab软件对数据记录仪采集的数据进行仿真验证。 K波段(12 mm)调频探测器调制参数:三角波调频、调制频率fm=200 kHz、调制带宽Δfm=160 MHz。运动目标为直角边长0.2 m的角反射体,运动速度为1 m/s。数据记录仪采样率为20 Mb/s。 为模拟高速条件下算法性能,采用数据分裂合并的办法将运动速度等效提高300倍,模拟速度V=300 m/s条件下差频信号,然后把加速后的差频信号转变成二维矩阵M×N的数据(列向量长度M=100,行向量长度N=100),对二维矩阵进行二维DFT变换仿真得到运动目标对应的距离-速度-能量关系,如图3所示。其中,X轴为距离信息,Y轴为多普勒信息(速度),Z轴能量信息,通过获取有效速度范围内的最大能量对应的距离、速度信息够获取进行运动目标距离-速度联合估计。当对二维矩阵进行数据刷新后,可以得到连续的进行运动目标的距离-速度联合估计,如图4所示。 图3 某时刻二维DFT变换的距离-速度-能量图Fig.3 Distance-velocity-energy diagram of two-dimensional DFT transform at a time 图4 动目标距离-速度联合估计Fig.4 Joint range-velocity estimation of moving target 仿真结果分析见表1所示,数据刷新率同调制频率fm相同为200 kHz,多普勒频率理论值为50 kHz,多普勒测量精度pf=fm/N为2 kHz,测量多普勒范围在精度范围以内,理论测距分辨率pr=c/4Δfm为0.468 75 m,实际测距分辨率和位长有关,此次仿真验证采用离线处理,故测量测距分辨率同理论测量分辨率。 表1 仿真结果分析表Tab.1 Analysis table of simulation results 仿真结果表明,基于二维DFT变换的调频引信信号处理方法能够利用无线电调频引信系统的差频信号进行运动目标距离-速度联合估计。 本文提出了基于二维DFT变换的调频引信信号处理方法。该方法把无线电调频引信的一维差频信号变换为二维矩阵,然后对二维矩阵数据进行二维DFT变换,通过二维DFT变换后的二维频域信息联合估计差频信号中的距离、速度信息。仿真试验表明,该方法能够利用无线电调频引信差频信号进行运动目标距离-速度联合估计,为无线电调频引信实现高精度分档装定,干扰信号识别提供了一种技术途径。3 仿真验证
4 结论
