基于CompactRIO的内燃兰金循环发动机节气门闭环控制研究*
2019-05-14王晏妮李理光胡宗杰同济大学汽车学院上海200092
王晏妮 李理光 康 哲 胡宗杰(同济大学汽车学院 上海 200092)
引言
在排放法规日益严格和要求二氧化碳排放逐步降低的双重压力下,实现发动机高效清洁燃烧成为未来发动机研究的重点[1]。悉尼大学的Bilger教授于1999年首次提出内燃兰金循环(internal combustion ranking cycle,ICRC)[2],该循环采用纯氧代替空气作为进气介质,避免了缸内高温燃烧产生的NOx排放[3];同时使用缸内喷水技术[4],通过控制喷水量[5]、喷水温度、喷水时刻等参数来控制燃烧速度,利用水汽化吸收热量来降低缸内燃烧温度,保证燃烧可控的同时增加缸内做功工质,拓宽燃烧相位,提高发动机热效率,降低燃油消耗率,提高了发动机动力输出;通过引入适当比例的EGR可有效控制燃烧速度及缸内最高压力,进一步提高循环热效率。对内燃兰金循环发动机的研究主要集中在火花塞点火式发动机中[6],由于其工作原理限制了其压缩比的提高,制约了内燃兰金循环热效率的进一步提高,因此亟待开展更多关于新型燃烧方式的研究。
均质压燃着火(homogenous charge compression ignition,HCCI)发动机[7]是近十余年来国际上研究的热点,也是基础研究在内燃机中的集中体现[8]。HCCI通过制备均质混合气实现了缸内低温燃烧,有效避开了碳烟和氮氧化物的生成区间,实现超低排放和无烟燃烧,解决了柴油机高NOx排放和碳烟排放问题。如能在发动机运行过程中将均质压燃技术的优点体现出来,则对于发动机满足日益严格的排放标准有很大帮助。
为了进一步提高内燃兰金循环发动机的热效率并降低排放,开展均质压燃技术与内燃兰金循环相结合的研究非常必要。在均质压燃的内燃兰金循环中,发动机工作负荷和缸内燃烧程度与进气量以及进气中氧气的浓度息息相关。若想实现稳定的均质压燃,进气流量、进气压力、进气中氧浓度的稳定性对于发动机运行时的边界条件控制非常重要。目前,内燃兰金循环发动机试验台架使用进气道喷射并利用电子节气门对进气量进行调节,节气门快速准确地达到目标开度对于发动机在不同负荷下的工作稳定性尤为重要。因此,有必要开发稳定高速的控制器对节气门开度进行控制。
1 控制模型建立
美国国家仪器公司(National Instrument)推出的CompactRIO平台,拥有坚固的硬件构架,支持Lab-VIEW图形化开发工具对其编程,基于CompactRIO的数据采集具有极高的实时性和稳定性[9-10],其完成单通道的切换采集最快只需7 μs,保证了系统的高实时性[11],非常适合作为节气门控制系统的控制单元。
本文使用NI 9205和NI 9478作为模拟输入和数字输出模块,与节气门体相连,连接方式如图1和图2所示,构建了节气门电子控制模型。
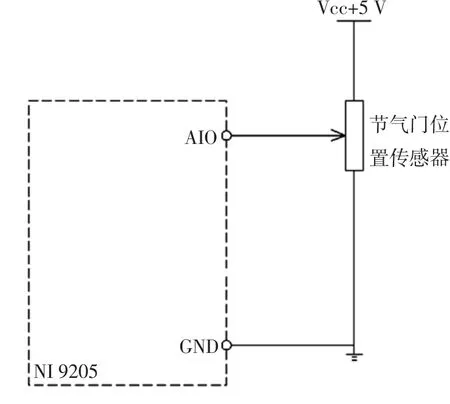
图1 NI 9205模拟输入
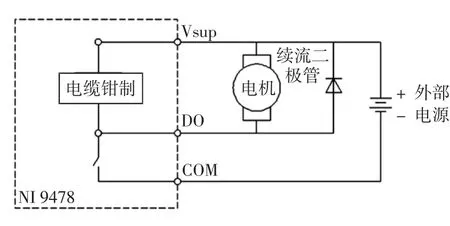
图2 NI 9478数字输出
节气门体主要由节气门阀、驱动电机、减速齿轮组、复位弹簧和节气门位置传感器等组成,节气门基本参数如表1所示。
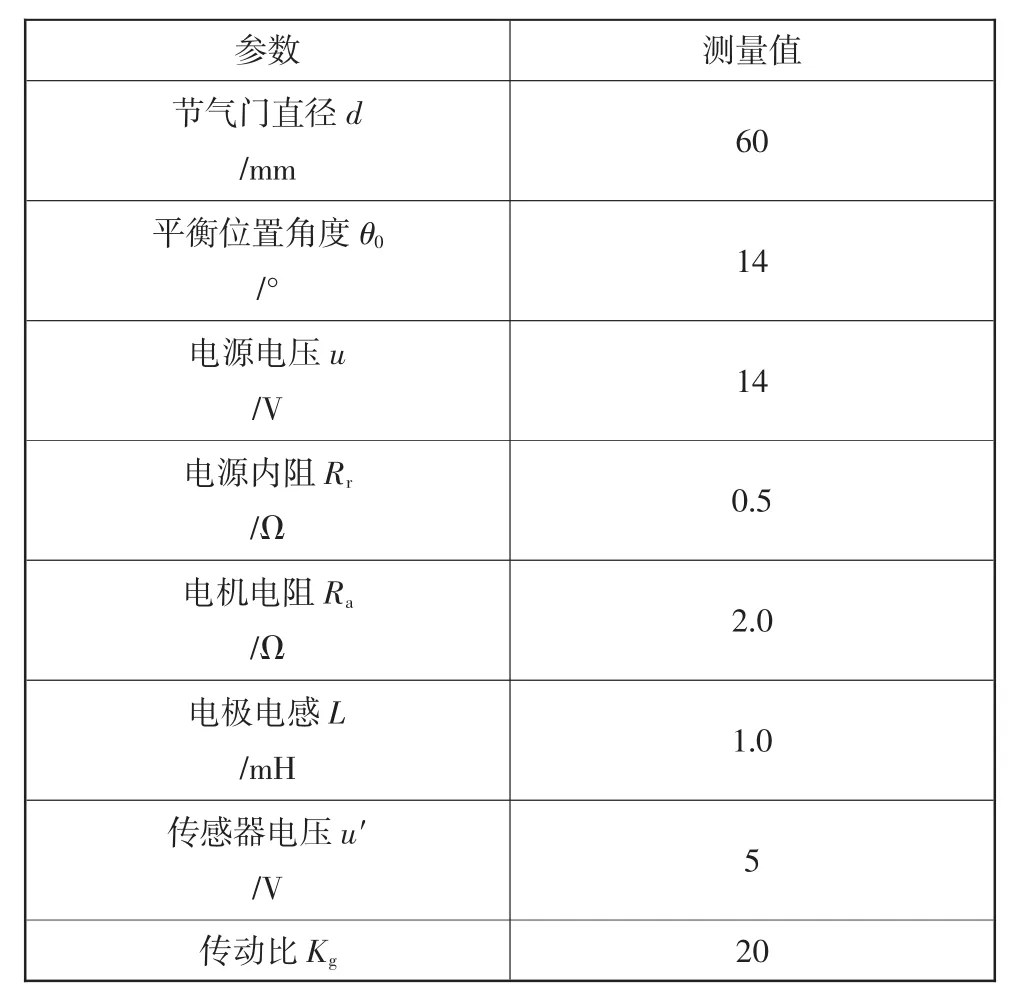
表1 节气门基本参数
节气门动态参数如表2所示[12]。

表2 节气门动态参数
节气门位置传感器(throttle position sensor,TPS)用于实时采集节气门开度,对闭环控制进行位置反馈,是节气门状态的唯一检测元件。电子节气门要求具有高度的可靠性,因此节气门位置传感器采用冗余设计。图3为输出电压与节气门开度之间的对应关系,可作为后续控制算法的基础。
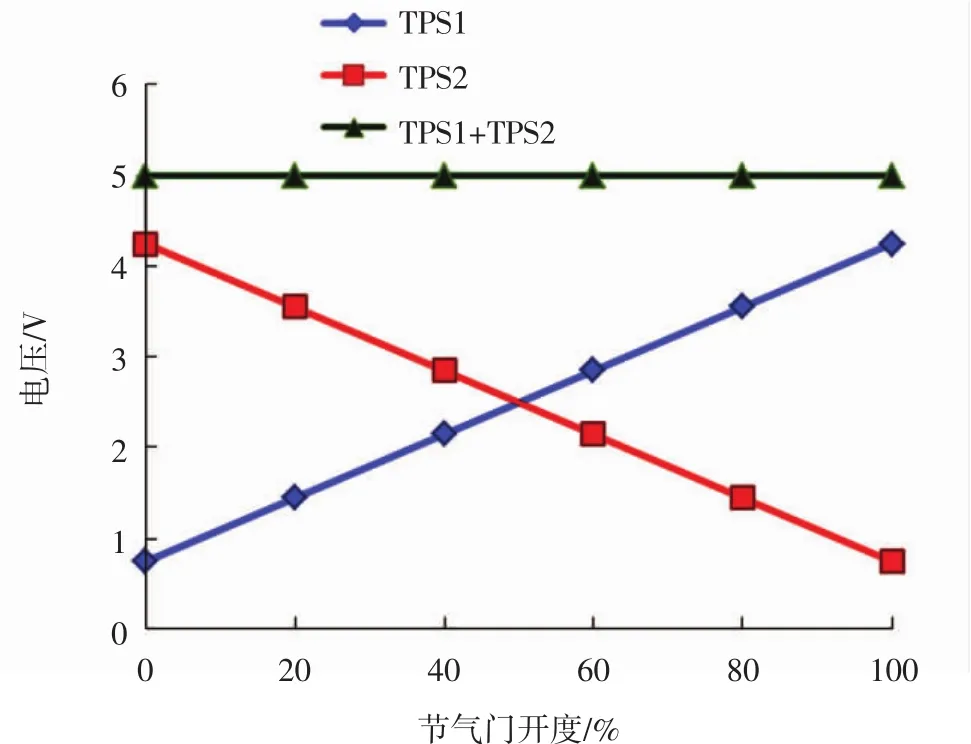
图3 节气门位置传感器标定
2 控制策略选取
发动机节气门进气控制结构复杂且变化速度快,此外,节气门还受到由复位弹簧造成的非线性力矩及不稳定因素的影响。因此,要做到对节气门预期位置的精确控制,一是要了解节气门的动态特性,二是要运用恰当的控制理论和方法。已有的对于节气门的控制主要有PID控制[13]、增量PID控制[14]、模糊控制[15](简单的模糊控制不具有积分环节,很难完全消除系统静态误差,难以实现电子节气门阀片开度的精确控制[16])、反推控制[17-18]、变结构控制[19-20]、自适应控制[21]等多种控制策略。
由于电子节气门控制系统实现的目标是足够高的静态稳定性和动态频响,所以要求控制算法结构简单、运行时间短。PID控制作为现代控制技术中最常用且最为经典的控制方法之一,具有无需建立精确的系统数学模型、结构简单、参数物理意义明确、动态及静态性能优良等特点,能满足电子节气门的控制要求。
3 控制结果分析
基于CompactRIO平台,利用LabVIEW编程,采用3种控制算法对节气门体进行控制,利用仿真实验得到了节气门开度分别为10%~50%及50%~90%时,频率为0.1 Hz的方波信号的响应,用以表征节气门对于静态信号的响应。并得到了节气门开度为10%~90%时,频率为0.2 Hz的方波信号及锯齿波信号的响应,作为动态响应的评价依据。
3.1 插值算法
插值算法将节气门开度分为0%~10%、10%~20%、20%~30%、30%~40%、40%~50%、50%~60%、60%~70%、70%~80%、80%~90%、90%~100%等 10个区间,分别标定每个节气门开度区间所对应的维持占空比,见表3。标定完成后,判断节气门目标开度所处的区间,采用线性插值法,获取此开度下节气门的起动占空比信号、维持占空比信号和减速占空比信号,从而实现对节气门开度从0%~100%的控制,在保证稳定性和准确性的前提下,实现节气门体对目标信号的快速响应。

表3 插值算法各插值区间节气门驱动电机占空比数值分布
图4为插值算法下节气门开度为10%~50%时方波信号响应仿真结果,图5为插值算法下节气门开度为50%~90%时方波信号响应仿真结果。从图4和图5可以看出,在对静态信号的跟踪过程中,上升时间在0.6 s左右,总体调整过程平稳,无抖动,存在略微超调及一定量的稳态误差。
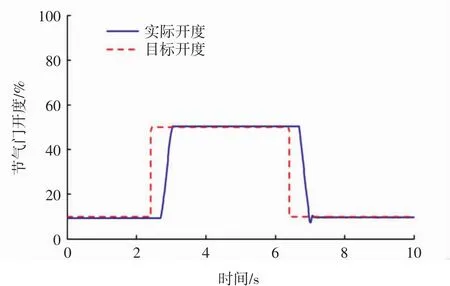
图4 插值算法-节气门开度为10%~50%时方波信号响应
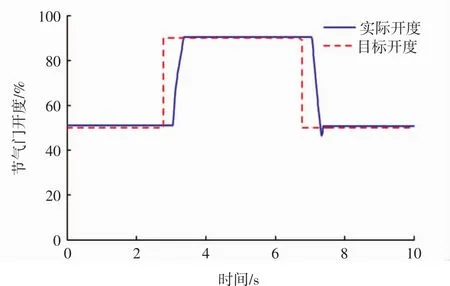
图5 插值算法-节气门开度为50%~90%时方波信号响应
图6 为插值算法下节气门开度为10%~90%时方波信号响应仿真结果,图7为插值算法下节气门开度为10%~90%时锯齿波信号响应仿真结果。从图6和图7可以看出,在对2种动态信号的跟踪过程中,均存在0.2s左右的时间迟滞,这是由于程序结构造成的。为了实现节气门位置的精确控制,并且有很好的稳定性,插值算法牺牲了快速性,由此导致方波信号失真严重(无法给节气门驱动电机提供瞬态较大的占空比)。
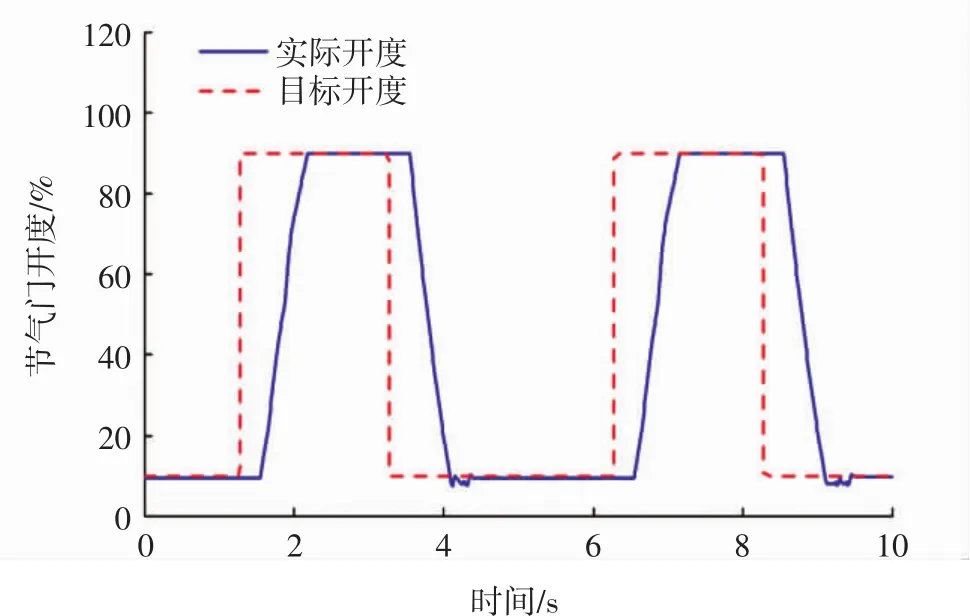
图6 插值算法-节气门开度为10%~90%时方波信号响应
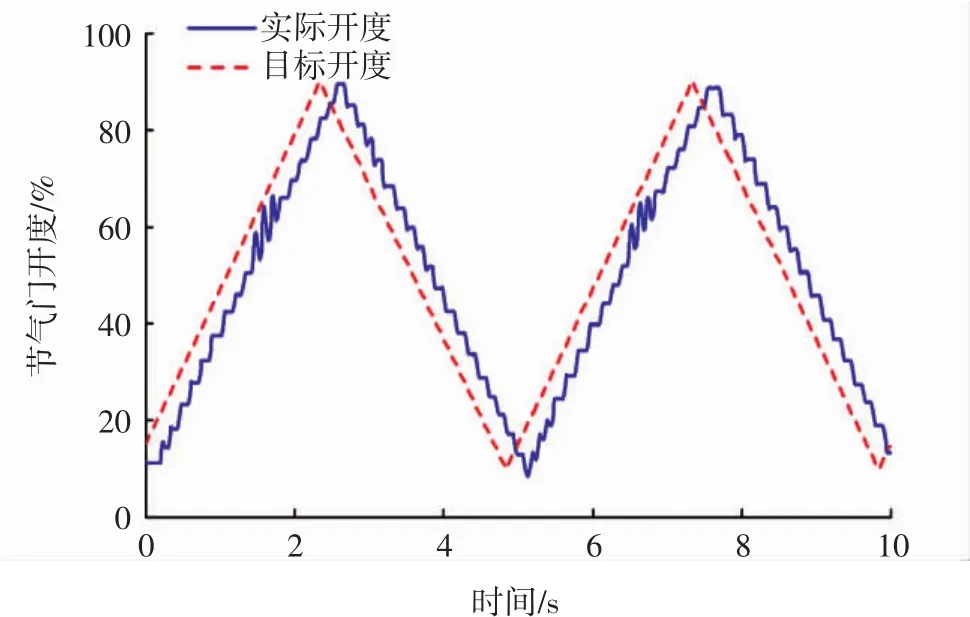
图7 插值算法-节气门开度为10%~90%时锯齿波信号响应
3.2 PID算法
在完成插值算法的设计之后,通过对仿真结果进行分析,发现在随动信号的跟随中存在明显的时间迟滞,上升时间大。为了改善控制效果,设计了PID算法,通过调整比例系数Kp、积分系数Ki和微分系数Kd1来实现对节气门快速准确的控制。
在考虑均衡快速性、准确性和稳定性等3个因素后,最终的PID控制器参数设置为:比例系数Kp=3,积分系数Ki=0.003,微分系数Kd1=0。

图8 PID算法-节气门开度为10%~50%时方波信号响应

图9 PID算法-节气门开度为50%~90%时方波信号响应
图8 为PID算法下节气门开度为10%~50%时方波信号响应仿真结果,图9为PID算法下节气门开度为50%~90%时方波信号响应仿真结果。从图8和图9可知,使用PID控制算法可明显缩短上升时间,使节气门迅速达到目标开度。但此算法也存在一定量超调和稳态误差。
图10为PID算法下节气门开度为10%~90%时方波信号响应仿真结果,图11为PID算法下节气门开度为10%~90%时锯齿波信号响应仿真结果。
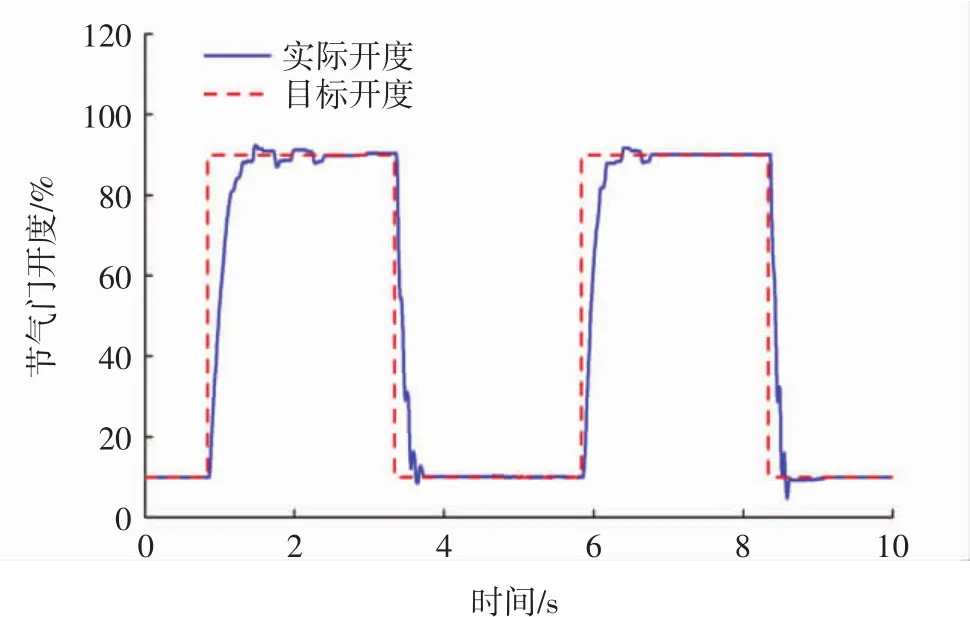
图10 PID算法-节气门开度为10%~90%时方波信号响应
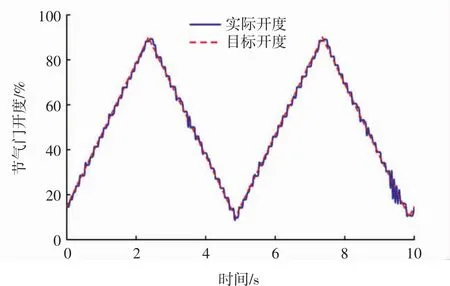
图11 PID算法-节气门开度为10%~90%时锯齿波信号响应
从图10和图11可以看出,PID算法对动态信号的跟踪效果显著优于插值算法,这是由于增加了控制器的比例系数Kp,减小了上升时间。方波信号的波形保持较好,通过控制算法的优化(当节气门开度减小,位置误差大于10%时,直接将占空比调整到0。在节气门开度达到目标开度的3%范围内,再调整占空比进行控制),使得下降沿的响应时间优于上升沿。
3.3 分段PID算法
上述PID算法存在一定的稳态误差(见图9及图10),为了进一步优化控制效果,设计了分段PID算法,它将插值算法与PID算法的思想相结合,通过误差来跟踪目标信号,采用绝对位置使节气门稳定到目标开度。
分段PID算法的思想是以误差信号进行跟踪,以绝对位置进行稳定。即在上升过程中提供大的占空比、大的比例系数Kp、小的积分系数Ki,保证节气门开度可以迅速变化到目标开度附近。当误差减小到一定范围内时,通过节气门绝对开度来提供合适的维持占空比、小的比例系数Kp、大的积分系数Ki,减小稳态误差,保证节气门开度的准确性和稳定性。由此可实现节气门控制的快速、准确和稳定,控制效果很好。
图12为分段PID算法下节气门开度为10%~50%时方波信号响应仿真结果,图13为分段PID算法下节气门开度为50%~90%时方波信号响应仿真结果。从图12和图13可知,采用分段PID算法,节气门体能够对目标信号快速准确地响应,上升时间短,稳态误差非常小。
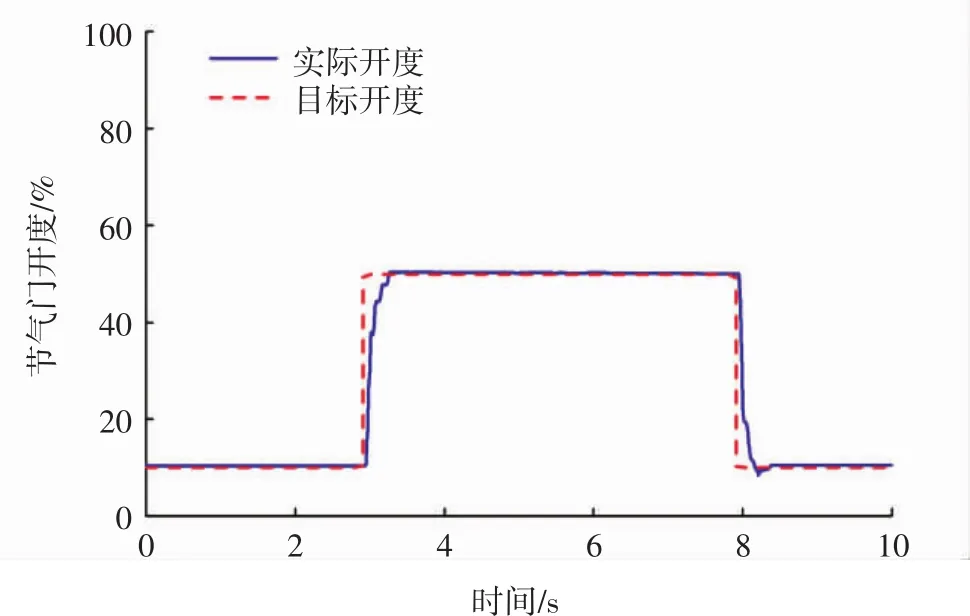
图12 分段PID算法-节气门开度为10%~50%时方波信号响应
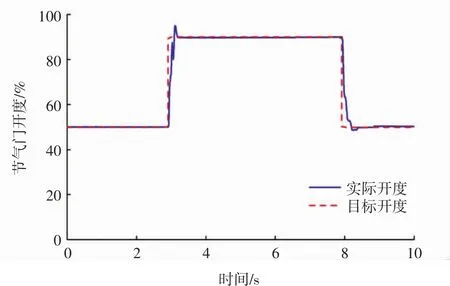
图13 分段PID算法-节气门开度为50%~90%时方波信号响应
图14 为分段PID算法下节气门开度为10%~90%时方波信号响应仿真结果,图15为分段PID算法下节气门开度为10%~90%时锯齿波信号响应仿真结果。从图14和图15可以看出,对3种动态信号跟踪效果较好,无明显的时间迟滞现象,通过控制器的比例系数Kp减小了上升时间。方波信号的波形保持较好,上升时间小,超调量也较小,无稳态误差。

图14 分段PID算法-节气门开度为10%~90%时方波信号响应
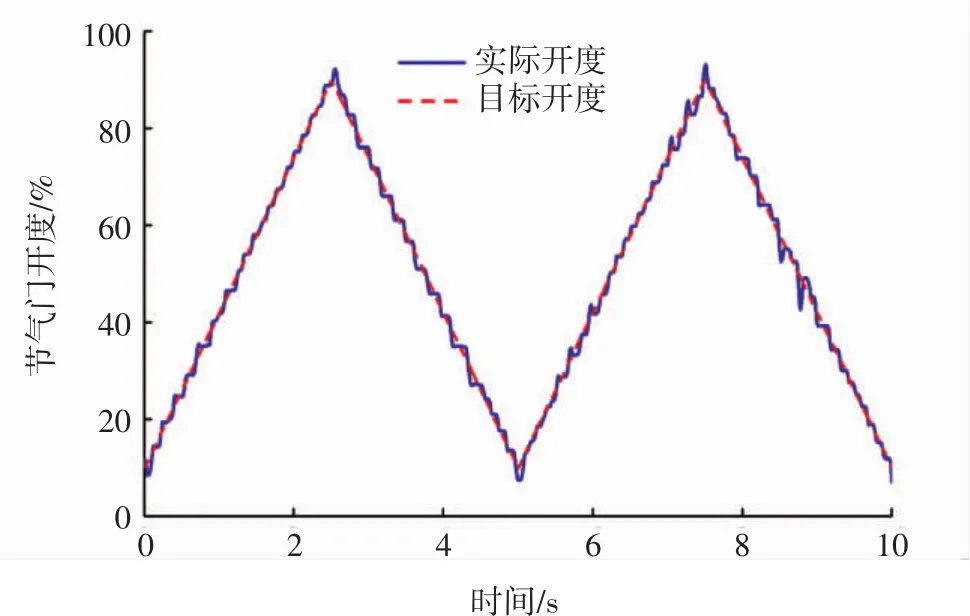
图15 分段PID算法-节气门开度为10%~90%时锯齿波信号响应
3.4 算法控制效果对比
表4为控制算法上升时间对比,表5为控制算法最大超调量对比,表6为控制算法稳态误差对比。
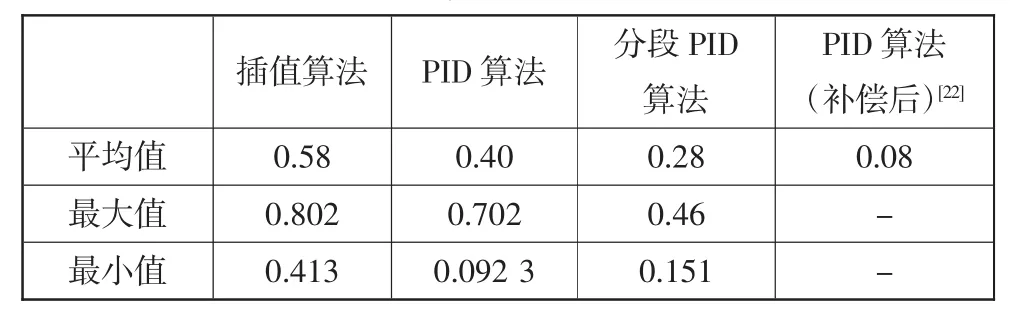
表4 控制算法上升时间对比 s
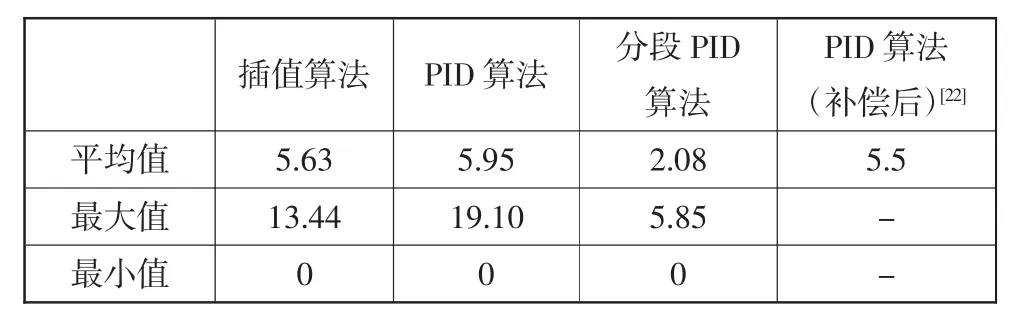
表5 控制算法最大超调量对比 s
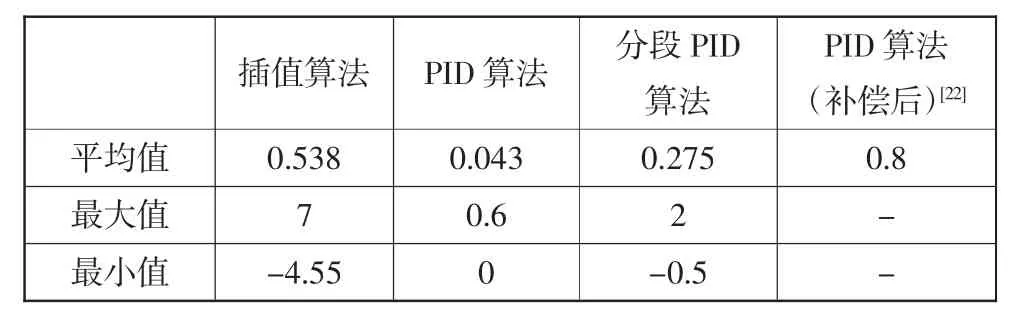
表6 控制算法稳态误差对比 s
综合表4、表5和表6,从瞬态响应的上升时间、最大超调量和稳态误差出发,可以看出,分段PID算法的控制效果最优,上升时间短,最大超调量可控,稳态误差很小,能实现对节气门体进行快速、准确、稳定控制,与吉林大学冯巍等人[23]采用智能PID算法阶跃信号的响应时间为0.5 s相比,本文采用的算法上升时间为0.28 s,对于控制效果有明显的改善;与合肥工业大学李宏超设计的控制算法[22]相比,上升时间较长,但在最大超调量和稳态误差方面具有显著优势,对于发动机台架试验更具优势;PID算法上升时间短,稳态误差小,但在不同节气门开度区间内的波动量较大。在10%开度处的最大超调量很大,系统不稳定,通用性差。但由于设计简单,调试方便,可用于节气门小开度区间内的控制;插值算法上升时间长,存在一定量无法消除的稳态误差。但由于不存在PID算法的积分环节,可快速稳定,抖动很小,稳定性优良,对于台架试验中要求恒定的进气量有一定意义。
在下一步开展的内燃兰金循环发动机台架试验中,可利用本文所取得的节气门闭环控制优化结果就采用电子节气门对进气量进行精准控制和调节做进一步的研究。
4 结论
基于NI公司的CompactRIO嵌入式平台,建立了电子节气门控制系统,针对CompactRIO中的2个C系列模块:NI 9205和NI 9478,编写了电子节气门控制系统的PWM信号输出程序、节气门位置信号采集程序和3种闭环控制程序。对电子节气门控制策略进行了研究,逐步建立了插值算法、PID算法和分段PID算法,对节气门进行控制。通过对比3种控制算法对电子节气门控制系统的控制效果,论证了在存在明显非线性因素的电子节气门控制系统中,分段PID算法是3种控制算法中最优的控制策略,上升时间短,最大超调量小,稳态误差小,可实现对节气门体快速准确稳定控制。
