基于虚拟叶片模型的阵列风力机尾迹研究
2019-05-09刘燕
刘 燕
(中国大唐集团新能源科学技术研究院,北京 100040)
0 引言
随着风电的大规模开发和利用,尾流效应已成为影响风力发电效益的主要因素之一。尾流效应造成下游风速降低、湍流强度增大,引起机组振动频繁,疲劳损伤加剧,严重威胁风电机组的安全运行。研究考虑尾流效应的风电场气动控制策略优化技术,减少风电场尾流效应,是当前风电技术研究的热点之一。
通过风电场控制策略的改变减缓尾迹效应已有相关研究,主要有两种方法减缓尾迹效应:一是通过调整桨距角和扭矩改变风力机的轴向诱导因子,优化风场全局的风能吸取量[1-3];二是改变上游风力机的偏航状态,从而改变尾流方向,使尾流主方向避开下游风力机,虽然上游风力机的功率有所降低,但是全场的功率得到了提升。Jiménez等[4]采用 LES模拟了风力机下的风速分布、湍流强度及湍流各项异性等相关流动特性,Wagenaar等[5]实验测试了 10台风机排列的风场尾迹,沿着风机排列可观察风速的显著降低和湍流强度的增加。Guntur等[6]应用工程模型预测了仰角风力机的尾流亏损。Fleming等[7]研究了多种重定向尾迹的方法及其对风力机功率捕获和结构载荷的影响进行了比较。
国内对于风电场全局控制的研究较少。文献[8]模拟了两台兆瓦级风力机不同排列方式下风场的尾迹和功率输出。李春等[9-12]以5 MW为研究对象,改变上游风力机的偏航和俯仰角度以及风轮的锥角来控制尾流方向,研究了不同控制方式下两台风力机的最大输出功率。这些研究工作研究风力机数量少,仅有两台,使用全三维雷诺平均NS(Reynolds-Averaged Navier-Stokes equations,RANS)模拟,计算时间非常长。
叶素动量方法(Blade Element Momentum,BEM)方法无需考虑实际的几何边界,使用等效的体积力源项表征三维的旋转效应,考虑叶尖和叶根损失,在保证一定精度前提下大幅降低计算量和计算时间,虽然无法精准的描述进叶轮处的三维流动特征,但是对于大型风电场的优化模拟,特别是适用于工程领域,有着独一无二的计算优势。
因此,为了研究风电场乃至大型风电场的功率优化特性,基于虚拟叶片模型(Virtual Blade Model,VBM),通过调整偏航角度研究全风电场不同排列方式下的功率特性,寻找优化大型风电场效率的工程方法。
1 几何模型与尾迹偏移控制策略
风力机为国内某厂家生产的1.5 MW风力机,叶片长度42 m,轮毂中心高72 m。尾迹偏移控制策略如图1所示,箭头表示风轮或叶片的控制转向。偏航角定义为来流风向正对风轮时,上游风力机的风轮平面水平或垂直偏转一定角度,从而使尾迹流向改变的角度。通过多角度调整偏航,研究双风力机及多风力机排列的尾流及功率,讨论控制方法影响风力机尾迹流向的能力。
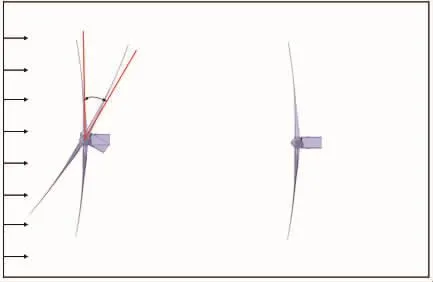
图1 WT1偏航
风力机组的间距对下游风力机的载荷和输出功率有较大影响:若距离过近,上游尾迹高强度湍流易引起下游风轮叶片的疲劳载荷,且因风速亏损仍未恢复,使下游风力机输出功率降低;距离过远则造成土地资源浪费。同轴两风力机间距为8D,即8倍风轮直径,此距离为陆地风电场上下游风力机的常用设计距离。
多风机阵列模型设置9个风力机阵列,错列和顺列两种方式,如图2所示,红色为顺列布置,蓝色的为错列布置,图3为对应的网格。通道为矩形截面,尺寸为 2 870 m×820 m×410 m(70R×20R×10R,R为风机叶轮半径)。第一排风力机位于入口下游的4R处,尾迹的发展区域需要通道总长度的3/4以上,以便充分求解尾迹行为。为了解偏航控制策略的效果,选取多种控制角度。
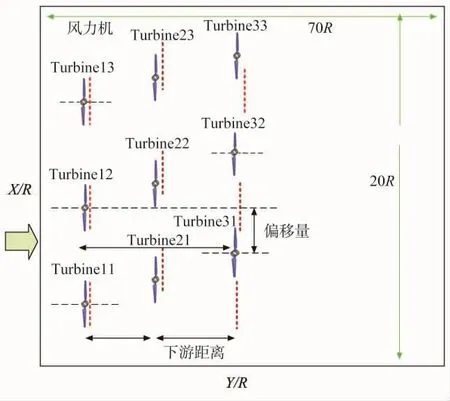
图2 风力机阵列结构

图3 模型及网格
边界条件,进口设为速度进口,流动方向垂直于进口平面;出口设为压力出口,为标准大气压;地面设为无滑移壁面;顶部和侧面设为对称平面。模拟为稳态不可压缩定常数值模拟,湍流模型采用常用的SST k-ω模型,使用Segregated隐式求解,压力—速度耦合采用SIMPLE算法。为接近大气边界层环境,边界湍流强度设为 6.3%[13]。
2 数值模型
虚拟叶片模型 (Virtual Blade Model,VBM)是Ruith开发的一种基于先前Zori和Yang提出的分析叶轮空气动力学性能的方法[14]。虚拟叶片模型基于叶片单元模型,使用简化的圆盘形子域代替计算域中旋转的叶片,不需要在计算域中创建实际的叶片几何形状和划分高精度的网格。
在虚拟叶片模型中,沿叶片从根部到尖部划分若干截面,根据攻角、弦长和翼型形状计算各截面上的升力和阻力。VBM适用于模拟时间累积平均效应的旋转叶片流动。
叶轮的旋转效应由圆盘流体区的网格单元上求解的动量方程中添加的时间平均源项表示,其通过在流体方程中施加体积力实现,源项考虑了翼型类型、弦长、扭角等气动参数,每个截面上力通过方程(1)计算得到。

式中:α 为攻角;Re为雷诺数;Ma马赫数;CL,D为升力或阻力系数,根据截面处翼型的攻角α和雷诺数Re通过查表得到;c为叶片截面弦长;ρ为空气密度;Urel为相对于叶片的空气速度。
对于N个叶片的叶轮,每个单元的(时间平均)升力/阻力为

式中:N 为叶片的数量;δr为叶片离散厚度;δθ为给定时间内旋转弧度。
对于每个元素计算的升力和阻力在全叶片转速下进行平均,以计算每个离散化单元上的等效源项[15]。
3 结果分析
3.1 同轴风力机功率输出对比
图4为偏航角度5°~50°的风力机总输出功率,风力机1为上游风力机,风力机2为下游风力机。0°为风力机间距为8D的基准算例,可以看出,无偏航时,上游风力机功率为1 496 kW,非常接近风力机的设计功率,误差仅为0.265%,证明了计算结果的准确性和所用方法的可行性,而下游风力机功率为350 kW,仅为上游风力机功率的23.35%。可以看出,当上游风力机1的偏航角度从0°增加到50°时,其输出功率逐渐降低,而相对应的风力机2的功率逐渐增加,其总功率趋势先增大后减小,在风力机1偏航角度为25°时达到最大,达到2 308.9 kW。
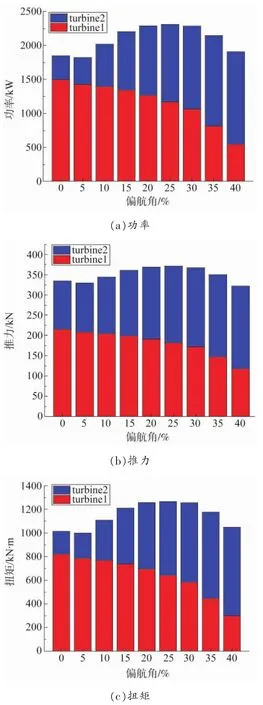
图4 上游风机不同偏航角度下的风力机输出功率、推力、扭矩变化
推力和扭矩随偏航角度的变化与总输出功率类似,上游风力机1的推力和扭矩随角度变化,从5°到50°,推力和扭矩降低,下游风力机的推力和扭矩相对应地增加,25°偏航角度时,上游风力机1的推力和扭矩分别降低了15.3%和21.6%,相对应的由于风力机1偏航角度改变导致的尾流干扰降低所带来的风力机2的推力和扭矩提升分别为57.24%和234.2%,因此总的推力和扭矩在25°偏航角度时分别提升了10.6%和22.67%。说明在一定条件下,改变偏航角度,达到控制全局优化总的输出功率目的。但需注意,在改变风轮扭矩的同时,会引起叶片弯矩变化和疲劳载荷增大等结构方面的问题,因此在使用控制策略时需考虑载荷是否超过设计极限值。
图5是8种偏航工况下轮毂高度处水平切面的速度云图。由图可以看出,上游风力机尾迹对下游风力机的影响及不同偏航角度下的尾迹扩散。定义偏航角度顺时针方向为正。由图可以看出,偏航控制方法可显著改变上游风力机尾迹的方向,偏航角度越大,上游风力机的尾迹偏离风轮中心的幅度越大,并且随着下游距离的演化,其尾迹由最开始的对称分布逐渐变得不对称,并且随着传播距离的增加逐渐扭曲变窄,偏航25°~30°时轮毂高度处的尾迹在到达下游风力机时横向偏移约0.5D,即下游风力机约有一半运行在上游风力机的尾迹中,此时的风力机功率输出为1 222 kW,是无偏航控制策略时的3.5倍,输出功率显著提升。
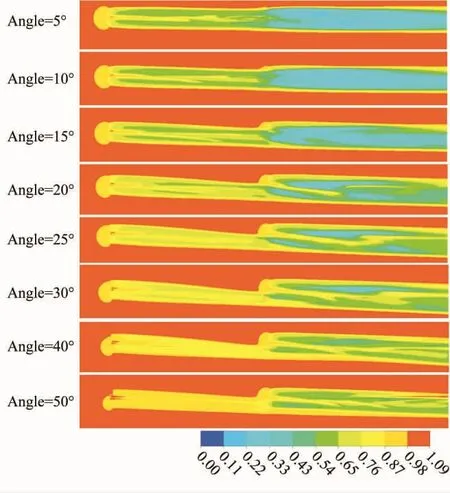
图5 轮毂高度水平切面速度云图
3.2 风场策略优化分析
错列布置 9台风力机中 WT21,WT22,WT31,WT32四台风力机位于下游上游风力机尾迹中,因此,选取对应的调节方式要尽可能地使下游风力机处于尾迹之外或者受弱尾迹干扰。选取两种调节方式;一是调节WT12,WT13两台风力机偏航角,使下游的风力机尾迹速度亏损降低;二是调节下游受干扰风力机的偏航角度,使其尽可能地处于弱尾迹中。由之前同轴偏航角度研究表明,在偏航角度25°~30°时,功率增加最大,因此本次选取偏航角度为 30°。
图6为两种调节方式下轮毂高度的水平切面的速度云图,由云图可以清楚地看出,偏航角度改变后的尾迹干扰情况。图6(a)是调节上游两个风力机的偏航角度后的速度云图,可以清楚地看出,偏航30°后,WT12,WT13两风力机叶轮的尾迹向右下偏移,偏移后,下游的风力机WT21,WT22的叶轮由近三分之一的区域位于上游两风力机的尾迹中,与此相对应的,下游的第3排的风力机的尾迹也相应地受到影响。WT12,WT13偏航后,整体上下游原来正对其尾迹的WT31,WT32两风力机叶轮受其尾迹干扰减轻。
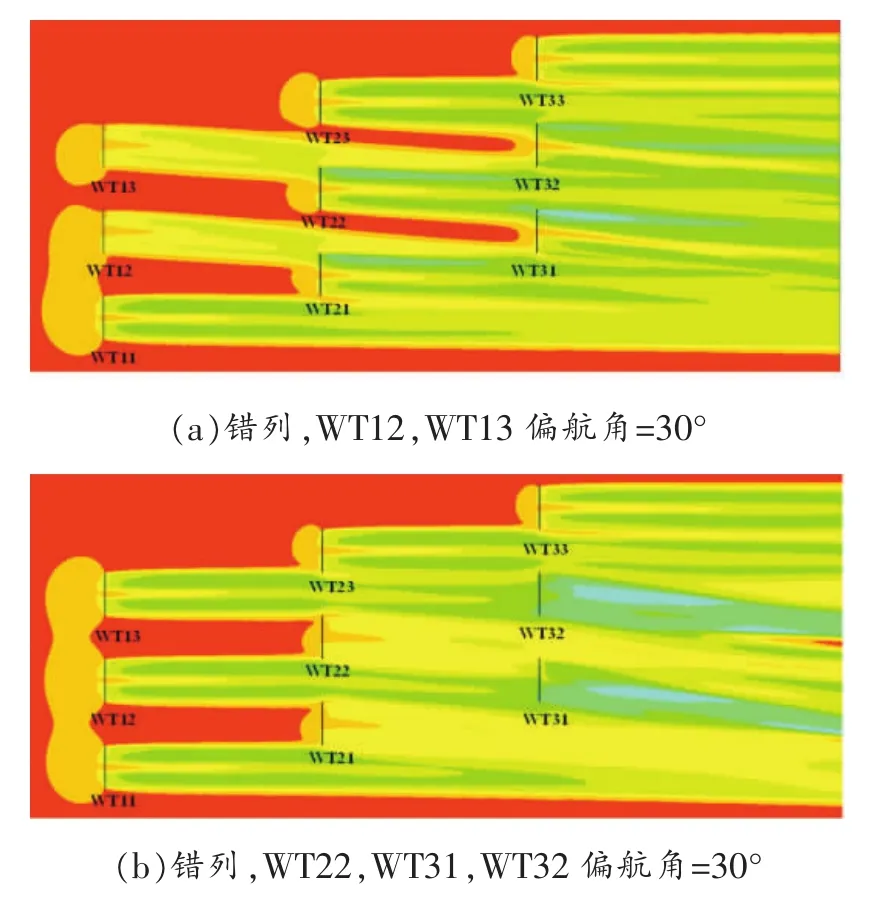
图6 错列结构布置水平切面速度云图
图6(b)是受尾迹干扰影响严重的 WT21,WT22,WT31,WT32四风力机叶轮调节偏航角度后的水平面速度云图,可以看出,WT21,WT22改变偏航角度后,尾迹向右下偏移,原来上游WT11,WT12风力机的尾迹受WT21,WT22风轮尾迹的影响,方向也向右下偏移,偏移幅度较小。
图7为顺列布置时轮毂高度的水平面速度云图。顺列布置时,最下游风力机WT31,WT32,WT33处于上游风力机的尾迹中,因此,本次只采取调节上游风力机偏航角度一种方式。当上游风力机偏航时,其速度尾迹向右下偏移,使其尾迹偏离正对下游风力机的来流,因此其最下游的风力机功率升高;尾迹偏移后,偏航角度超过一定角度后,尾迹达到中间风力机的右侧,WT12,WT11功率相应降低。
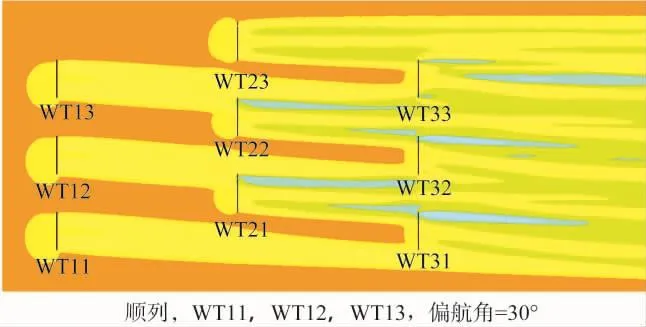
图7 顺列布置结构水平切面速度云图
图8为两种布置方式下的多种偏航角度的全场功率、推力、扭矩及其对应的变化百分比。两种布置方式都是9台风力机,可以看出,基准工况,错列布置方式全场功率水平高于顺列布置。顺列布置时,3种偏航角度,20°偏航角度下全场功率、扭矩和推力最大。错列布置时,调节第1排风力机的偏航角度,整场的功率、扭矩、推力水平增加,调节第2排风力机的偏航角度时,整场的功率、推力、扭矩水平与基准相比降低,主要是偏航调节后下游尾迹减弱带来的效益增幅小于偏航导致的自身的功率、推力和扭矩水平的降低幅度。由其与基准相比的变化图更加明显地看出,顺列布置时偏航角度改变和错列布置时第1排风力机的偏航角度改变使整场的功率、推力和扭矩增加,偏航角度在20°时,整场的功率、推力和扭矩增幅最大。
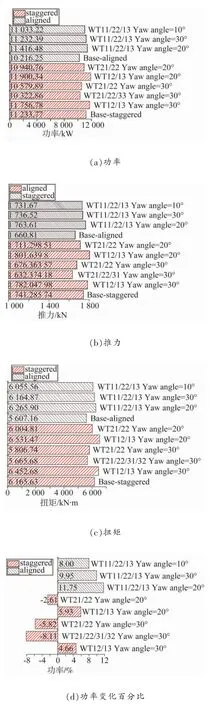
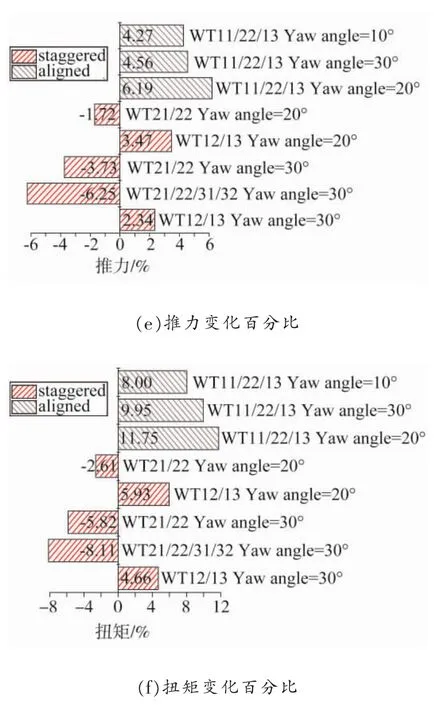
图8 两种布置方式下的全场输出功率、推力、扭矩及其百分比变化
4 结语
上游风力机组尾流的湍流扰动对下游风力机组的影响较大。下游风力机整体处于上游风力机的尾流低速区,顺列布置风力机会造成下游风力机组的输出功率减小。当上游风力机使用偏航控制时,上游的输出功率减小但下游的输出功率增大,25°偏航控制下游风力机功率增大59.1%。
对上游风力机使用基于偏航的控制策略时尾迹偏移效果显著,尽管上游风力机的功率有所降低,但下游风力机输出功率增加,使得风场输出总功率得以提高。偏航控制可将尾迹偏离下游风轮中心位置,使其得以捕获更多高能量的风。
风电场风力机排布时,尽量采用多机组错列布置,减少尾流影响。合理的偏航调节可以提高下游风力机的出力,提高整场效率。尽管使用偏航控制可增大风场的总输出功率,但可能引起上游风力机叶片叶根弯矩增大和下游风力机疲劳载荷增加等问题,因此仍需考虑各控制策略对叶片结构的影响。