模糊PID 和变频器在地下恒压灌溉控制系统的应用
2019-05-09李余进黄兆波杨彦鑫
吴 迪,李余进,黄兆波,李 琦,杨彦鑫
(云南农业大学 机电工程学院,昆明650201)
华宁县是云南省内有名的柑桔栽培区, 亨有“桔乡”的美誉[1]。 该地区地貌类型复杂,垂直高差悬殊大,柑桔在生长的过程中需水量大,传统的灌溉方式灌溉均匀性差,设备和管网容易出现故障和破损,水资源利用率不高,能源消耗大。 因此在地下恒压灌溉系统中保证管网压力的恒定对于整个系统具有重要意义。
灌溉系统是一个非线性、滞后性、时变性的复杂系统,很难建立精确的数学模型,常规的PID 控制虽然具有结构简单、稳定性好等特点[2],但是针对该灌溉系统常规PID 控制方法很难保证管网压力恒定和较好的控制效果。 为了解决此问题,故在此采用模糊PID 控制和变频调速相结合的方法。 模糊PID 控制的特点在于无需知晓被控对象精确的数学模型,只需要提供现场操作人员和专家灌溉的经验数据,采用模糊数学的相关知识,将精确量进行模糊化,通过模糊推理和解模糊后输出Kp,Ki,Kd参数给PID 控制器,实现参数在线整定的目的来保证管网压力的恒定,它既体现了模糊控制灵活而适应性强、超调小的特点,又保证了PID 控制器的良好动态跟踪品质和稳态精度,对复杂系统可以得到满意的控制效果[3]。
在此, 针对地下恒压灌溉系统管网压力的特点,设计了实现管网系统压力实时控制的模糊自整定PID 控制器, 并利用MatLab 软件中的模糊控制工具箱和Simulink 进行了系统的建模和仿真分析。
1 恒压灌溉控制系统的整体设计
1.1 试验装置
采用的试验装置主要包括数据采集模块、控制器PLC、系统执行模块、种植箱、管网系统。 试验装置模型如图1 所示。

图1 试验装置模型Fig.1 Experimental device model
1.2 恒压控制系统概述
恒压灌溉控制系统主要由三菱PLC、 变频器、(HMI)触摸屏、抽水电机、水桶、压力变送器、光照度变送器、流量计、管网等组成。 该控制系统分为三大部分:数据采集模块、控制器PLC 和系统执行模块。 ①数据采集模块 主要通过各类传感器进行现场信息的采集,然后将采集的信息通过ZigBee无线网络技术将压力、光照、液位等信息通过无线传输的方式,把控制信息传给控制器PLC;②控制器PLC 主要负责数据的逻辑运算和存储;③系统执行模块 主要负责完成控制器发出的执行命令。
该系统通过(HMI)触摸屏进行数据的实时显示和存储, 最后可以将这些数据上传至PC 或保存在U 盘里, 同时可以实现集中控制与手动控制的转换以及声光报警。 手动方式可以设置管网的压力、电机的频率、光照等。 该系统采用模糊PID 和变频调速的方法,能够快速、准确、稳定地实现管网压力的在线控制并保证管网压力的恒定。
1.3 工作原理
恒压灌溉控制系统是由三菱PLC、变频器、抽水电动机、压力变送器等设备构成的闭环控制系统。该系统采用模糊PID 控制的方法,管网的压力由压力变送器进行采集, 将采集的压力值输入模糊PID控制器并与设定压力值进行比较,计算出压力误差e 和压力误差变化率ec, 经过模糊化后得到模糊控制量E 和EC;E 和EC 通过模糊推理得到PID 自整定参数修改值ΔKp,ΔKi,ΔKd, 将该推理结果输出给PID 控制器,经过解模糊后将执行命令传给变频器,变频器将会以不同的频率调整电机的转速,从而实现对管网压力的恒压控制目的。
三相异步电动机的转速n 为
式中:f 为供电电源频率;p 为异步电动机的磁极对数;s 为转差率。
1.4 变频恒压节能原理
恒压灌溉控制系统通常以压力为控制参数,一般采用2 种控制方法,转速控制和阀门控制。 ①阀门控制是在抽水电机转速恒定的情况下,通过改变阀门开度来调节管网的压力;②转速控制法是将阀门开度恒定在某个区间,通过调节抽电机的转速改变管网系统的压力[4]。 根据抽水电机变速的原理,调速前后流量Q,扬程H,水泵消耗的功率(轴功率)P与转速N 之间的关系为
式中:Q1,H1,P1分别为变速前的流量、 扬程、 功率;Q2,H2,P2分别为变速后的流量、扬程、功率[5]。 由式(2)可知,水泵流量Q 与转速N 成正比,扬程H 与转速N 的平方成正比,轴功率P 与转速N 的3 次方成正比。

对于恒压灌溉控制系统,其管网的压力一般会根据具体的地形、管网的布置和开阀的情况,进行压力的设置; 如果水泵长时间处于工频运行状态,就会造成能源的大量浪费, 同时也存在安全隐患。因此,根据具体的控制农艺要求将压力设置在某一范围,采用变频调速的方法,压力变送器进行在线采集管网的压力,将压力值进行模糊化处理,通过模糊推理、解模糊,最终将压力转化为频率,变频器通过不同的频率来调节水泵的转速,从而保证系统的压力恒定。 通过分析采用变频调速控制的方法所消耗的电能比阀门控制的方法要少得多,节能效果非常显著。
2 模糊PID 控制器的设计
2.1 模糊PID 控制器工作原理
模糊PID 控制器以压力偏差e 和压力偏差变化率ec 作为输入,它们经过模糊化处理后变成模糊语言集合的子集E 和EC[6]。 经过模糊规则、模糊推理和反模糊处理,可以得到PID 参数的调节量ΔKp,ΔKi,ΔKd,输入PID 控制器后,利用
在线整定出PID 参数Kp,Ki,Kd。 最后,根据PID 算法计算出控制量u,将控制命令u 经过变频器以不同的频率来改变抽水电机的转速,从而使恒压灌溉控制系统具有良好的动、静态性能,实现对管网压力的实时控制。 模糊自适应PID 控制器结构如图2所示。
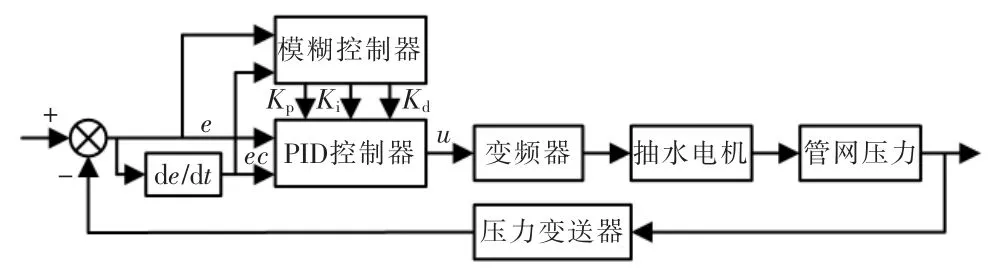
图2 模糊PID 控制器结构Fig.2 Structure of fuzzy PID controller
2.2 灌溉管网系统模糊控制器设计
灌溉管网系统模糊控制器为双输入三输出的二维模糊控制器[7],其输入变量为压力的偏差e 和偏差的变化率ec,输出变量为Kp,Ki,Kd。
根据农艺要求,该灌溉系统管网的期望压力值为45~55 kPa,根据专家和操作者的经验,确定偏差e 的基本论域为[-5,5],偏差变化率ec 的基本论域为[-3,3],E 和EC 的论域等级定为{6,-5,- 4,-3,-2,-1,0,1,2,3,4,5,6}, 模糊子集为{NB,NM,NS,ZO,PS,PM,PB},其含义依次为负大、负中、负小、零、正小、正中、正大[8]。 即可以得到量化因子:Ke=1.2,Kec=2。输入量选择高斯形隶属函数,输入变量e和ec 的隶属度函数如图3 所示。
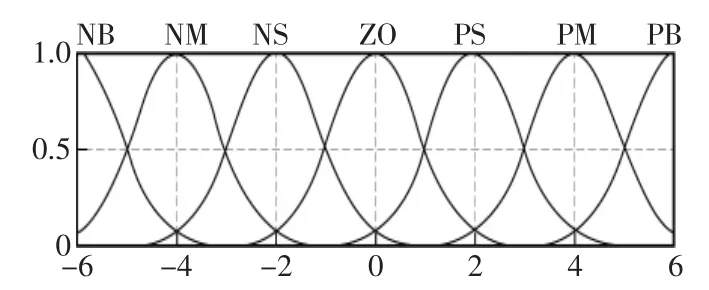
图3 e 和ec 的隶属函数Fig.3 e and ec membership functions
Kp,Ki,Kd的基本论域分别为(-0.6,0.6),(-0.9,0.9),(-3,3),输出量所取得模糊子集的论域等级定为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊子集为{NB,NM,NS,ZO,PS,PM,PB},其含义依次为负大、负中、负小、零、正小、正中、正大。 因而,比例因子Kp=0.1,Ki=0.15,Kd=0.5,采用Mamdani 所提出的模糊化方法,输出量选择三角形隶属函数[9]。 输出变量Kp,Ki,Kd的隶属度函数如图4 所示。
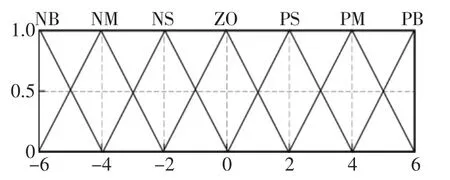
图4 Kp,Ki,Kd 的隶属函数Fig.4 Membership functions of Kp,Ki and Kd
2.3 模糊规则的编写
根据专家和操作者所给出的灌溉经验,可以得到PID 参数Kp,Ki,Kd的自整定规律。 当∣e∣较大时,应取较大的Kp和较小的Kd,这样系统的响应速度会加快,且使Ki=0 可以避免出现超调;当∣e∣中等时,应取较小的Kp,这样系统不容易出现超调,取适当的Ki和Kd(其取值对系统响应的影响较大);当∣e∣较小时,应取较大的Kp和Ki,这样系统的稳态性能会提升,Kd的取值应适当,以避免在平衡点附近出现振荡[10]。 根据这些规律得到的模糊规则见表1。
根据表1,可以归纳出以下49 条控制规则:
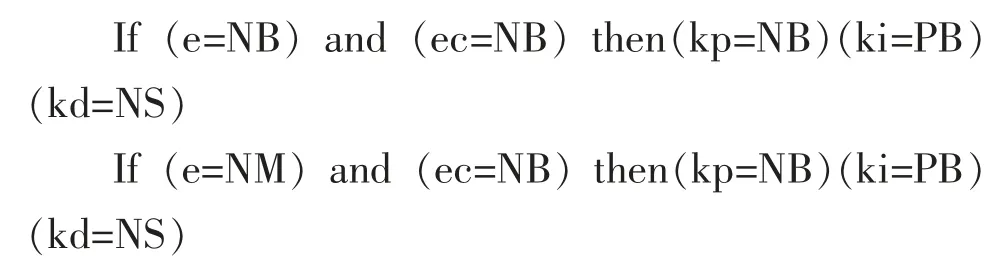

表1 ΔKp,ΔKi,ΔKd 的模糊规则Tab.1 Fuzzy rules of ΔKp,ΔKi,ΔKd

2.4 解模糊化
模糊推理得到的结果是一个模糊集合,不能直接用于调整PID 的参数,而实际模糊控制系统所得到的控制输出信号必须是模糊论域中的精确量,因此需要对模糊集合进行解模糊。 在此,采用重心平均法进行解模糊化,其具有更平滑的推理控制,即使对应于输入信号的微小变化,输出也会发生变化。 即

式中:Xi为第i 个模糊输出量;u(Xi)为第i 个模糊输出量的隶属度[11]。
3 系统的建模与仿真
3.1 系统建模
恒压灌溉控制系统是一个滞后性、非线性、时变性的系统, 在仿真中需要将它近似为一个线性系统。 为验证模糊PID 控制算法的有效性和实用性, 使用MatLab 中的Simulink 工具搭建系统模型。 采用模糊PID 控制和常规PID 控制的系统性能进行对比分析。 为便于研究,假设系统传递函数为1.2/(9.5s2+12.6s+1)-1,模糊PID 控制和常规PID 控制的系统阶跃响应如图5 所示[12]。

图5 模糊PID 控制和常规PID 控制的仿真模型Fig.5 Simulation model of fuzzy PID control and conventional PID control
3.2 仿真结果分析
仿真结果如图6 所示。 由图可见,常规PID 控制,管网压力的调节时间ts=8 s,超调量约为42%,稳态误差ess=0;模糊PID 控制,调节时间ts=6 s,超调量约为20%,稳态误差ess=0。 模糊PID 控制的调整时间可减少至6 s,超调量减小到20%,模糊PID控制器的响应更快,超调量小,控制效果更好。
4 结语

图6 仿真结果Fig.6 Simulation results
针对云南省华宁县柑橘种植基地的地形地貌特点,采取了模糊PID 和变频调速相结合的控制策略,对管网系统的压力进行实时调节。 该控制策略克服了普通PID 控制器的局限性和工频启动的缺陷性。设计了模糊PID 控制器;利用MatLab 软件中的模糊控制工具箱和Simulink 对系统进行建模与仿真试验,对模糊PID 控制方法和常规的PID 控制方法进行仿真对比。 仿真结果表明,模糊PID 控制器的响应更快,超调量小,控制效果更好。 模糊PID 和变频调速控制策略应用于实际的柑橘种植基地,相比传统的灌溉方式,每灌溉666.67 m2种植地可节水、节能分别达到35%和40%以上,且具有很好的经济效益。该控制系统有很强的实用性和推广价值。
