在3GPP室外场景下基于粒子群优化算法的多用户定位方案
2019-05-08史桢宇
史桢宇,胡 滨,王 艺
(华为技术有限公司,上海 200000)
0 引 言
近年来,精准定位广泛应用于蜂窝移动网的多个场景,如物联网、自动驾驶、定点广告投放、社交及无人机等。相对于前代移动通信,5G对定位精度提出了更高要求,达到米级的定位精度[1-2]。蜂窝网中,可通过移动网络的终端用户设备,如手机和平板等,将测量信息上报给基站和核心网,也可通过基站测量信息并上报给核心网,然后在核心网侧对终端进行位置计算。目前,在基站侧或者终端设备侧的主流测量有时间差(TDOA)、达到时间(TOA)、波达方向(DOA)、接收信号强度及历史信息等。核心网侧的定位功能模块基于收集的测量信息计算出终端的具体位置[3]。3GPP标准中对于定位的支持最早出现在Release 9的版本,并在后续版本中有所加强[4-5]。目前的版本支持的定位方式有基于单站距离和角度测量的增强型小区索引(Enhanced Cell ID,E-CID)的定位方式和基于多站时间差测量的观察达到时间差(Observed Time Difference of Arrival,OTDOA)的定位方式等。但是,由于测量值的不准确性和算法局限性等问题,在LTE网络部署下,只能达到30 m的定位精度,无法满足5G的定位要求。
现有的LTE单用户定位方案主要基于单个用户相对于多个基站的时间差测量,在已知多个基站位置的条件下,通过多个双曲点找交叉点的方式来找到用户位置,即最常用的OTDOA定位。OTDOA定位算法比较经典的方法有基于Chan式的二次加权最小二乘法(Second Weighted Least Square,2WLS)、高斯牛顿(Gauss-Newton)算法及梯度算法等[6]。实际传输中,由于基站和用户设备之间存在时间同步的问题,测得的时间差存在误差,影响最终定位的准确性,因此需依靠其他测量量来抵消,如来波方向和用户设备之间的距离信息等。本文提出的PSO算法,不仅实现了在单用户上基于多个测量量的定位,还融合了多个用户的测量量。PSO算法的提出最早受生物学中动物群体迁徙行为的启发,如鱼群的移动和大雁南飞等[7]。群体中的每个个体往各自的方向移动,同时整个群体保持往一个方向移动。这种群体的移动方式也可用于优化方案。某个区域内,所有搜索种子可以以既参考个体又服从群体的方式进行搜寻,最终所有种子汇聚到的位置即为寻找到的最优解。由于这种搜寻方式可并行化处理,因此在实际系统中较易实现[8]。
分析PSO在单用户的OTDOA方案发现,该算法相对2WLS算法更接近理论界限[9-10]。本文将该算法扩展到更多的测量量,除基站和用户的距离测量外,PSO算法也融合了DOA和U2U的距离。同时,在用户设备移动的情况下,利用卡尔曼滤波器进一步平滑定位的轨迹,优化用户的位置。
1 时延和角度的误差模型
多个基站与用户设备的距离可通过测量下行或者上行的时延来获得[11]。例如,测量下行时延时,基站向用户设备发送一组序列作为定位参考信号序列,基站之间的序列是相互正交的。在用户设备侧,已知每个基站发来的序列,通过将不同的序列与收到的信号进行滑动相关,得到相关序列。由于不同基站发来的序列的正交性,寻找到的相关序列的首径即可认为是估计到的到达时延值。TDOA定义为第n个基站的到达时间与第1个基站的到达时间的差值。因此,对于第n个基站的TDOA可表示为:

其中,c是光速,Q表示整数化。由于存在多个基站,每个基站的时钟之间不一定对齐,基站时钟与用户设备的时钟也不一定对齐,因此通过滑动相关测得的时延会受基站和用户设备之间时钟不对齐的影响而带来同步误差。LTE中,对于该同步误差定义的模型为一个截断的高斯分布,表示为该误差不超过±2σTDOA。所以,TDOA的测量值最终可表示为:

其中,dn是实际的TDOA值,en是TDOA测量误差。由式(2)可知,TDOA的误差来源于两部分,一部分是整数化后的精度误差,另一部分是同步误差。精度误差是由信号的帧结构和带宽造成的,可使用大带宽传输来减小此误差,而同步误差目前较难克服。
DOA的测量准确性主要取决于天线数目。用户设备端的天线数目不够多,因此主要在上行进行DOA的测量。用户设备向基站发送上行参考信号,基站收到多个天线的接收信号,估计多个天线的信道系数后,通过角度估计算法计算直射径的波达角。角度定位算法包括DFT算法、MUSIC算法及ESPIRIT算法等[12-14]。实际场景中,DFT算法计算复杂度较小,在低信噪比的情况下鲁棒性更强;MUSIC算法要求做子空间的SVD分解,在天线较多的情况下计算相对复杂。因此,选择使用DFT算法计算角度。同样,角度的测量也受天线数量、接收信号的强度、信道的质量及角度估计算法的可靠性等影响。由于在标准中未对角度的误差进行建模,需使用一个高斯分布的误差来表示角度估计的误差,角度的测量可表示为:

其中,θ是实际的DOA值,eθ是TDOA测量误差,且服从零均值的高斯分布
直射径信道下,已知位置x,距离测量的条件概率函数(Conditional Probability Density Function,PDF)可表示为:

其中,dn(x)表示第n个基站到用户设备x的实际距离。x的最大似然估计就是使条件概率最大化的对应x,可表示为:

最大似然估计是可以达到克拉美罗界的最优算法,但是利用该算法找到位置的计算复杂度也较高。非线性最小二乘法可权衡定位准确性和计算复杂度。代价函数表示为:

需注意,当所有距离误差是独立同分布的高斯分布时,最小化式(6)的非线性最小二乘法法和最大似然估计式(5)是等效的。
2 多用户粒子群定位
在PSO算法起始阶段,分配一群粒子,每个粒子分配一个随机的位置。每个粒子计算各自的适应度函数,并基于适应度函数计算出pbest和gbest用于更新粒子的位置和移动速度。pbest是各个单独粒子时间上的最优位置,而gbest是当前时间整个群的最优位置。每个独立粒子i由三部分组成:二维搜索空间内的位置x、该粒子本身能找到的最优位置p1k及粒子的移动速度v1k。粒子的位置在初始阶段随机分布在搜索空间内,粒子的初始速度也是随机生成。基于每次的位置和移动速度的更新,粒子在搜索空间内每次同时移动,经过一些更新,最终所有粒子汇聚到同一位置,得到需要求得的位置。位置和速度的更新算法可参考文献[9]。由于每个粒子并行更新,因此计算复杂度不高。
2.1 单用户PSO
PSO算法中,用适应度函数f(x1k)更新粒子群的位置,通过搜寻粒子群中最大或者最小适应度函数来进行更新。单用户定位中,如果只考虑距离的测量,那么适应度函数就等效于式(6)的代价函数。考虑单用户使用多种测量值定位时,除不同基站的TDOA测量,还需考虑用户设备相对于服务基站的DOA测量。由于TDOA测量和DOA测量是相互独立的测量,所以可以相加。使用式(1)和式(2)的测量模型,多测量值的代价函数可表示为:

其中,ωDOA∈[0,1]作为一个权值,用来衡量不同测量值贡献于最终定位结果的权重;fTDOA(x)已由式(6)给出。基于高斯分布的角度误差模型,DOA测量量的代价函数为:

2.2 多用户PSO
多用户情况下,以用户为整组来考虑代价函数的生成。在每一个用户设备都有一个代价函数的基础上,假设组里有M个用户设备,而又由于每个用户设备的测量都是互相独立的,那么整组的代价函数在只考虑TDOA测量和DOA测量的情况下表示为:

其中,fhybrid(x)跟随式(7),xm表示第m个用户设备的二维坐标。在网络中,如果各个用户设备之间可通过雷达传感等信号获取距离信息,有助于进一步增强定位的准确性。用U2U测量表示用户与用户之间的距离信息,该测量模型也可表示为:

其中,lm,m'是第m个用户设备与第m'个用户设备之间的真实距离。em,m'是估计误差,假设该估计误差服从独立同分布的高斯分布需注意,位置的表示双向一致性,即基于该U2U测量模型,相应的代价函数为:

由于TDOA测量、DOA测量及U2U测量是相互独立的,两个代价函数可直接相加,得到基于整个用户组的整体代价函数为:

利用式(12)进行定位时,可能会出现局部最小值而造成误判,尤其在U2U的误差方差值较小时会出现误判现象。因此,需采用二步优化方法。第一步是基于单用户的TDOA+DOA的测量得到每个用户的位置,第二步是基于单用户定位得到的位置,将每个用户的搜索空间限制在一个较小的范围内,然后再基于式(12)的代价函数来精细化最后的位置。采用此定位方法,虽然复杂度有部分的增加,但是可有效避免粒子群的搜索不幸落入局部最小值而造成最终结果不准确的情况发生。
当用户设备移动时,随着移动可获取更多的测量信息,设备本身移动的位置和用户的不同时间点位置是强相关的,因此可通过滤波的方法来精细化位置信息,比较有名的滤波方法有扩展的卡尔曼滤波器(Extended Kalman Filter,EKF)方法。
3 仿真条件和结果
在3GPP Release 13规定的室外场景和信道模型下,对多用户的PSO定位方法进行仿真。该场景包含19个宏站,每个宏站对应3个六边形的宏小区。宏站的站间距为500 m。用户设备随机分布在57个宏小区内,平均每个小区内有6个用户。信道类型为3D-Uma。其他仿真主要配置如表1所示。为比较天线数量对DOA测量的影响,接收侧的天线数量分别选择8条、16条及64条。
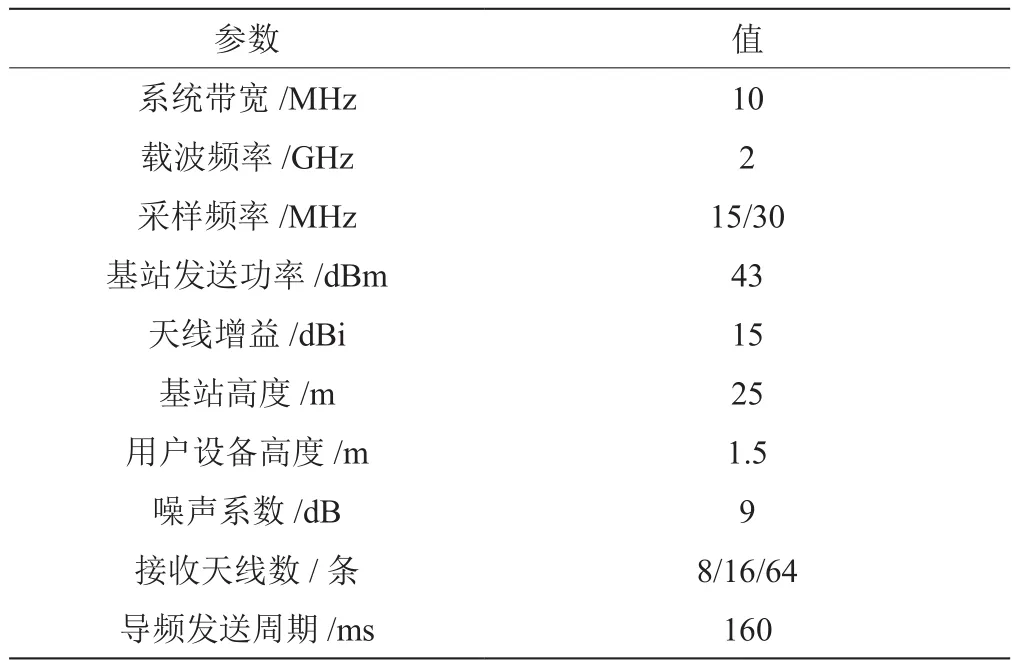
表1 仿真场景
3.1 接收天线数的影响
对单用户的PSO算法进行评估。图1(a)显示了不同接收天线数量下的DOA测量误差的累积分布函数(Cumulative Distribution Function,CDF)曲线。DOA的误差随天线数的增大而减小。DOA误差的标准差在天线数为8条、16条及64条时分别为13°、5°及0.5°。特别是64条天线时,几乎80%的用户设备的DOA误差在0.5°以下,而该情况下的DOA信息对最终位置的估计是最有益的。基于不同天线估计的DOA测量+TDOA测量下进行定位,定位误差的CDF曲线如图1(b)所示。天线数越多,定位精度越准。天线数为8条和16条时,定位精度相差不大。由于在此情况下角度估计还不准确,因此主要依靠TDOA测量实现准确定位。当DOA的精度达到0.5°以下时,对定位精度的提升非常明显。
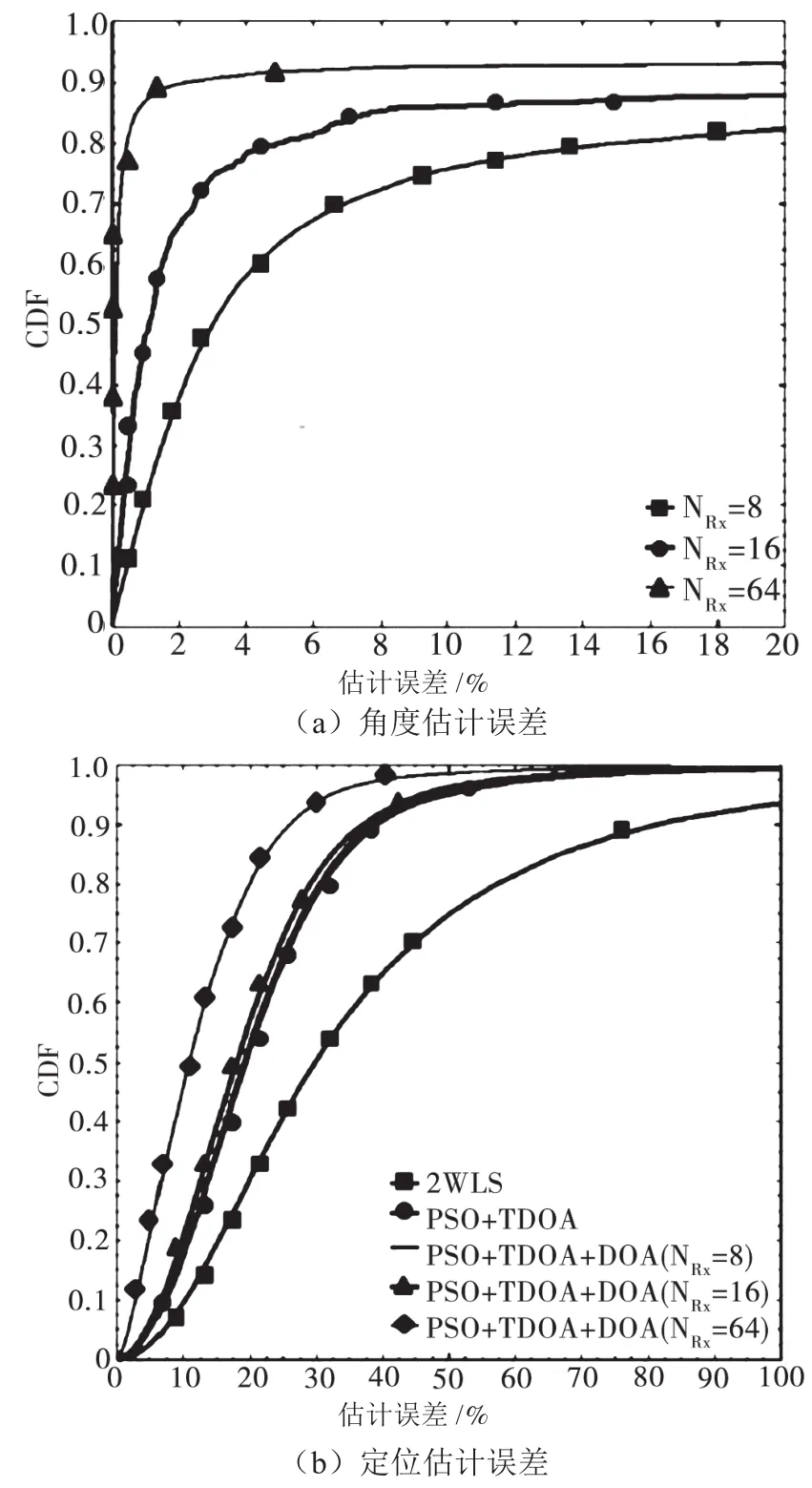
图1 不同接收天线数下的角度和定位估计精度性能分析
3.2 多用户定位评估
多用户定位仿真中,考虑理想同步和非理想同步两种情况。非理想同步时,参考3GPP的规定,使用了标准差为T1=50 ns的误差模型。非理想同步情况下,TDOA测量的标准差为17.5 m左右。使用64天线时,DOA的标准差为0.5°左右。将网络内距离较近的2~4个用户设备设为一组,并假设U2U测量的标准差为1 m。由于还要使用EKF进行滤波,假设每个用户设备是以0~5 m/s的速度进行移动。将OTDOA中用的2WLS算法作为比较基线。由图2可知,CDF=0.5时,PSO+TDOA+DOA+U2U的定位精度为10.8 m,大约是基线的1/3。使用EKF后,定位误差能继续提升1倍。图3是理想同步情况下的性能分析,主要定位精度结果如表2所示。由表2中可知,融合所有测量后,最高定位精度可达到1.3 m,接近分米级的定位精度。
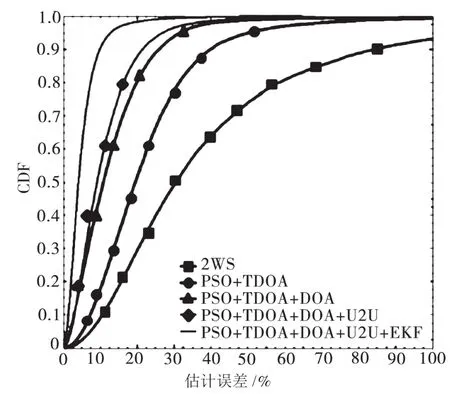
图2 非理想同步情况下多用户定位性能比较

图3 理想同步情况下多用户定位性能比较

表2 CDF=0.5时各定位精度
4 结 论
本文研究了一种基于PSO的多用户的定位方法。由于单一的定位测量已无法满足5G的高精度定位需求,TDOA的测量受限于同步误差,DOA的测量虽然不受同步误差的影响,但需较多天线才能实现较高准确度,U2U的测量能进一步精细化定位,所以融合定位方法成为一种定位思路。通过分析可知,PSO的算法能有效融合多种定位测量量,从而得到1.3 m的定位精度。同时,PSO算法具备的并行化特点也使其易于实现。因此,PSO的算法可成为重要的定位技术方案。
