新型三自由度混合冗余驱动机构运动学研究
2019-05-08张启升李瑞琴梁晶晶
张启升,李瑞琴,梁晶晶
(中北大学 机械工程学院,山西 太原 030051)
0 引 言
混合驱动机构由Tokuz[1]首次提出,是当今机构学研究的一大热点,它具有传统机构的大功率的优点和智能机构柔性化的特点.混合驱动机构基本驱动原理是:对于一个多自由度机构,其运动输入由不可控的恒速电动机和实时可控的伺服电机组成,其中恒速电机提供主要的动力,伺服电机承担较小的动力,通过联合控制两种类型的电机在机构的运动轨迹输出端能够实现高精度运动轨迹.混合驱动研究经过20余年发展已经基本建立了平面构型的理论基础,包括构型综合,运动学分析,动力学分析和应用等方面的内容[2-7].国内外关于混合驱动机构的研究的成果都停留于平面机构,研究的对象以平面二自由度的五杆机构、六杆机构和七杆机构为主.空间杆系的混合驱动机构的研究几乎难见于文献,混合驱动理论在向空间化发展的过程中受到构型的制约,在技术上没有获得突破.若将其向空间拓展必将在众多领域发挥积极作用.
Zhang[8-9]等提出了具有被动链的三、四、五自由度的并联机构.其结构特点是,由一条被动链完全提供并联机构的自由度,然后并联几条无约束支链,主动链的数目等于并联机构的自由度数.被动链只提供了动平台需要的所有约束,而主动链只提供对动平台的驱动.若在中间支链上加入驱动则形成一类新型的冗余驱动机构[10-11].得到的新型冗余驱动机构相对于一般并联机构具有刚度高、力操作性能优、承载能力大和定位精度高等优点,近年已成为机器人研究的一个热点.
基于冗余机构和混合驱动的这些优点,将混合驱动机构理论和冗余驱动理论有机结合,构造出一种新型混合冗余驱动的机构,该机构的自由度由中间的支链约束,中间支链动力由常速电机和伺服电机共同驱动,与对称静、动平台分布的其他支链一起构成冗余驱动,具有大功率、大刚度和工作时无奇异的特点.常速电机提供主要的动力来源,解决了伺服电机驱动力矩不足的缺点.文中构造出一种3-PSS-6R混合冗余驱动机构,建立该机构位置反解,对其运动学进行分析.
1 3-PSS-6R混合冗余驱动机构构型
将混合驱动理论运用于冗余驱动机构,形成新型混合冗余驱动机构(简称为HRDM),构造出新型3-PSS-6R三自由度空间HRDM简图如图 1 所示.
3-PSS-6R机构由动平台、静平台、连接动平台和定平台的4条支链构成.其中连接动、静平台的3条支链PSS(移动副—球铰—球铰)构型完全相同,对机构的自由度不产生约束,初始位姿下对称分布于动、静平台的圆周上,驱动完全一样.中间的支链6R由平面五杆机构和空间连杆串联而成(简称为HRDL).6R支链对整个机构的自由度产生约束,限制动平台眼Y2轴线方向的移动和绕X2,Z2轴线转动自由度,使机构具有两维移动和一维转动3个自由度.机构有3个自由度为 5个驱动,其中,4个为实时可控的伺服电机和1个为不可控的常速电机,故机构兼有混合驱动机构和冗余驱动机构的特征(简称为混合冗余驱动机构),6R支链为混合冗余驱动支链.通过改变3条对称分布支链的驱动杆的位移和改变6R支链伺服电机的驱动角位移,机构的动平台可在工作空间范围内实现3个自由度的活动(2T1R).
2 机构的运动学分析
在3-PSS-6R HRDM静、动平台上分别建立坐标系如图 1 所示,静坐标系O1X1Y1Z1安置于静平台上,3条PSS支链的移动副轴线与定坐标系相交于Bi(i=1,2,3)点,其均匀分布于半径R=360 mm 的圆周上, 相对圆心夹角为π/3,B1,B3关于X1轴对称,X1轴经过B2点指向右.动坐标系O2X2Y2Z2建立于动平台上,机构处于初始状态时Z1轴和Z2轴同轴线,X1轴、Y1轴分别同X2轴和Y2轴平行.球铰中心Pi(i=1,2,3)均匀分布于平面X2O2Y2上半径r=160 mm的圆周上.
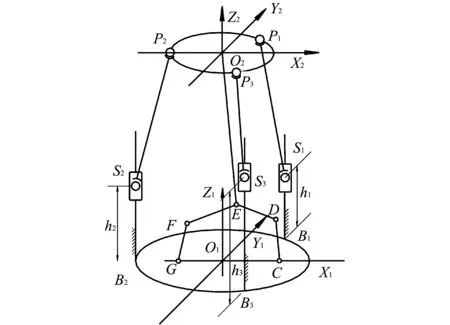
图 13-PSS-6R HRDM的构型及其坐标系Fig.1 The configuration and coordinate system of the 3-PSS-6R HRDM
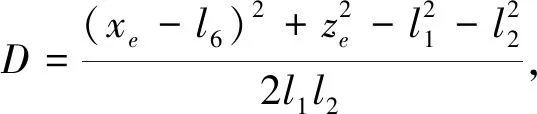
3-PSS-6R HRDM的位置逆解是已知动平台的位姿X=[x,z,β]T和常速电机的运动规律,求三个驱动移动副的位移hi(i=1,2,3)和中间支链的伺服电机的驱动角位移.由于机构对称支链3-PSS和中间HRDL待求的位置矢量方程和参数不同,下面分别求出各条支链的逆解方程.
2.1 对称支链3-PSS位置逆解
根据上文机构尺寸参数,求出O1Bi(i=1,2,3,)在静坐标系下的坐标矢量O1Bi=[O1Bix,O1Biy,O1Biz]T(i=1,2,3),动平台球铰中心点在动坐标下的坐标矢量O2Pi=[O2Pix,O2Piy,O2Piz]T(i=1,2,3).设动坐标系原点O2为参考点在静坐标系下的坐标矢量为P=[O1x,O1y,O1z]T, 通过欧拉变换(Z-Y-X)法,将O2Pi(i=1,2,3)转化为静坐标系下的坐标矢量O1Pi(i=1,2,3),表示为
(1)

由封闭矢量法,建立第i条PSS支链的矢量方程
O1Bi+BiSi=O1Si,
(2)
O1Si+SiPi=O1P,
(3)
Li=|SiPi|,
(4)
hi=|BiSi|,
(5)
式中:Li(i=1,2,3)为PSS支链连杆的长度,Li=L.
因为机构动平台位于静坐标系O1-x1y1z1平面上方,由式(1)~(5)求得移动副的驱动位移中心点O2的坐标(x,y,z)中z恒为正值且z>hi,hi代表移动副Si移动的距离,所以hi为正值,因此进一步得到PSS支链的位置逆解方程
(6)
2.2 HRDL支链逆解
混合冗余驱动支链由混合驱动的平面五杆机构CDEFG串联一个空间连杆EO2构成,它是一个复杂的并、串联机构组成的分支.分支的约束作用直接决定了整个机构的自由度.工作状态下,五杆机构固定于定平台上,由常速电机和伺服电机共同驱动.常速电机驱动FG杆,伺服电机驱动CD杆,运动输出通过EFG分支和CDE分支在E点耦合,通过连杆EO2共同作用于机构的动平台中心O2.伺服电机驱动分支CDEO2和常速电机驱动分支GFEO2末端位姿即为机构的位姿,通过D-H方法确定.建立分支6R的关节坐标系,如图 2 所示,D-H参数见表 1.
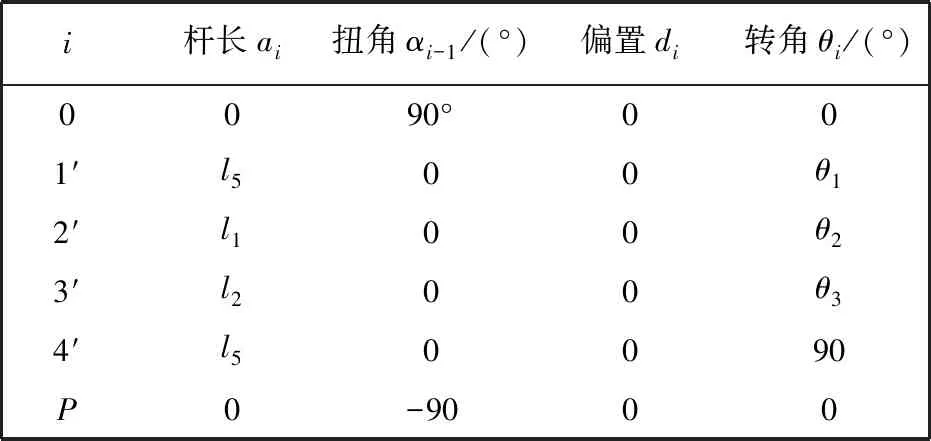
表 1HRDL D-H参数
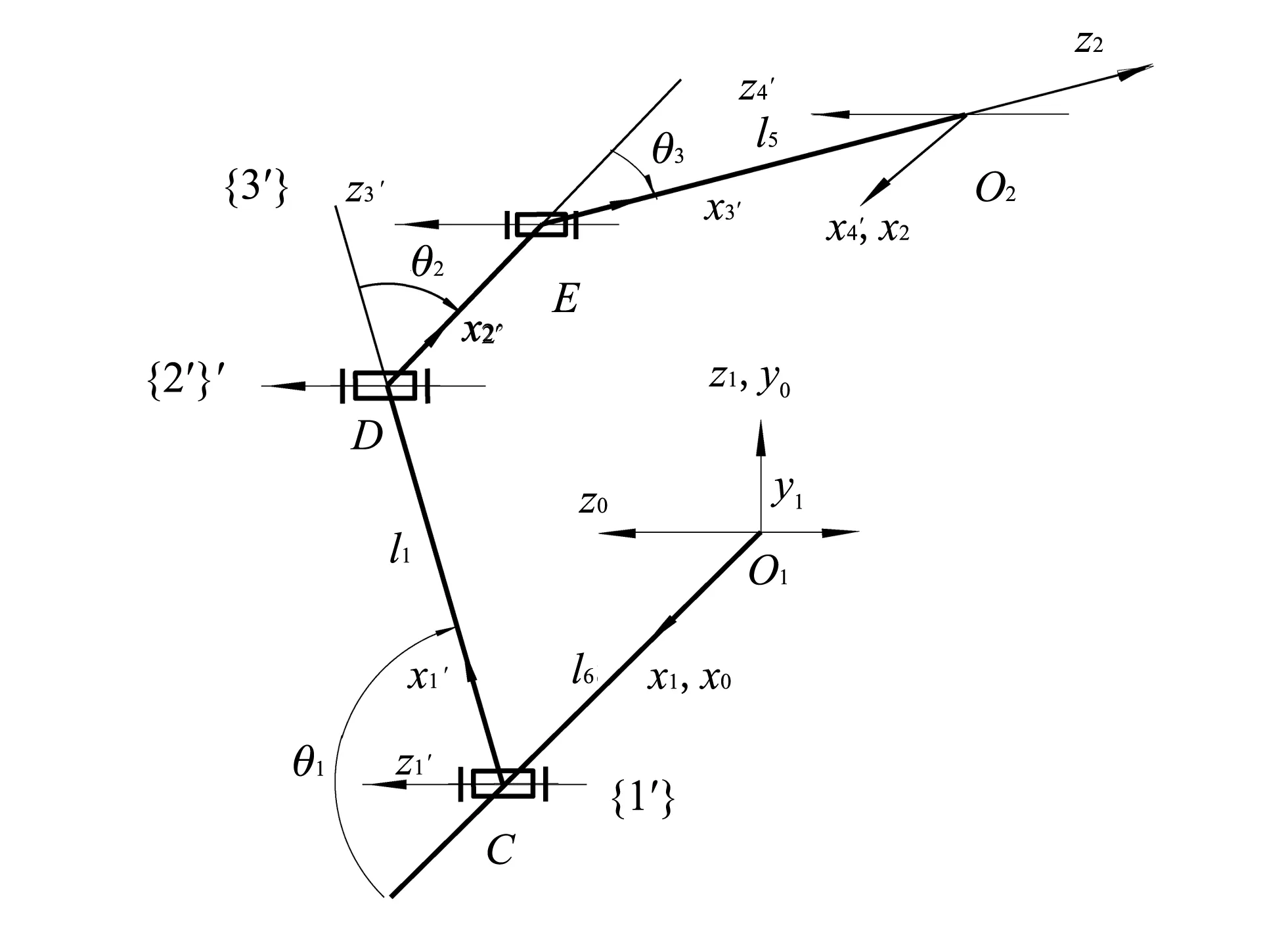
图 2支链6R坐标系Fig.2 The coordinate system of 6R limb
(7)

E点的坐标可通过齐次变换得到
(8)
由式(8)得到
(9)
混合冗余驱动的双动力安置于平面5R机构的两驱动转动副上,如图 3 所示,其中机架为CG杆,CD杆由伺服电机驱动,FG杆由常速电机驱动,CD杆FG杆共同作为混合冗余驱动支链的驱动.在两驱动杆作用下,驱动从动件DE杆和EF杆运动,以使E点输出柔性轨迹.此处设混合驱动平面5R并联机构中各构件的杆长分别为l1,l2,l3,l4, 2l6,相邻杆件之间的夹角分别为q1,q2,q3,q4,其中qi=θi,i=1,2.
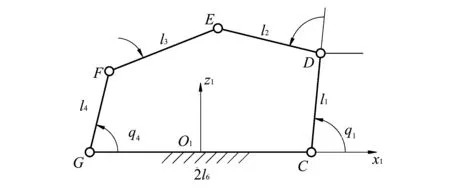
图 3平面5R并联机构Fig.3 Planar 5R parallel mechanism
如图 3 所示,用封闭矢量法分别建立五杆机构伺服驱动支链和常速驱动支链矢量方程
O1E=O1C+CD+DE,
(10)
O1E=O1G+GF+FE.
(11)
式(10)和式(11)分别向x,z轴投影,利用三角函数关系,得到
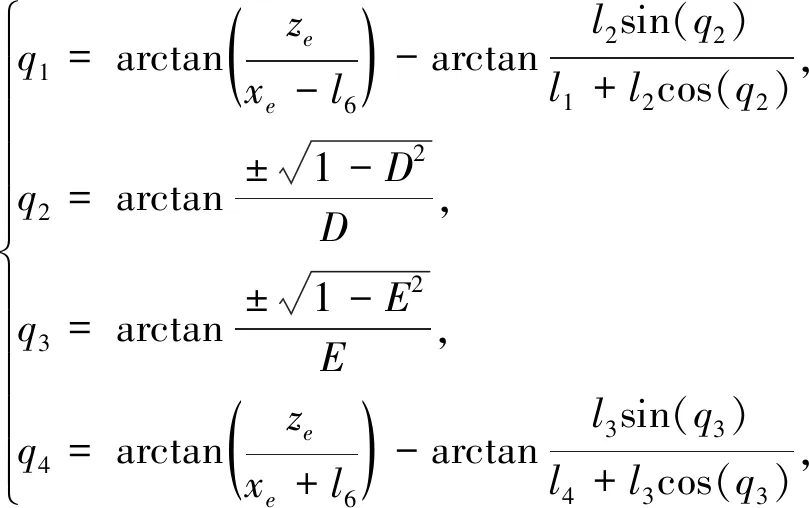
(12)
式(10)即为支链逆解,各有两个解.因FG为常速驱动只能单向运动,轨迹规划完成后,在给定的时刻角度是一定的,因此,在给定位姿时q4确定,q3为l3向l4过渡的转角根据初始机构的装配关系也能确定.
3 机构的运动学实例
对救援机器人进行直线运动轨迹的仿真,规划机构末端参考点相对动平台中心点的运动规律为
(13)
假设常速驱动电机的角速度ω4=5 rad/s,机构动平台中心点做勾速直线运动,机构末端参考点位置从初始点p0(0,0,720),到终止点pe(100,0,670),运动时间为20 s,仿真步数为200,在空间的轨迹如图 4 所示.

图 4 HRDM做直线运动Fig.4 The HRDM makes linear motion
仿真结束后,进入结果处理窗口,应用对象测量功能,测量 4 个驱动杆的位移、速度和加速度随时间变化的曲线,混合冗余驱动支链伺服电机的角度、角速度和角加速度变化曲线如图 5 所示.

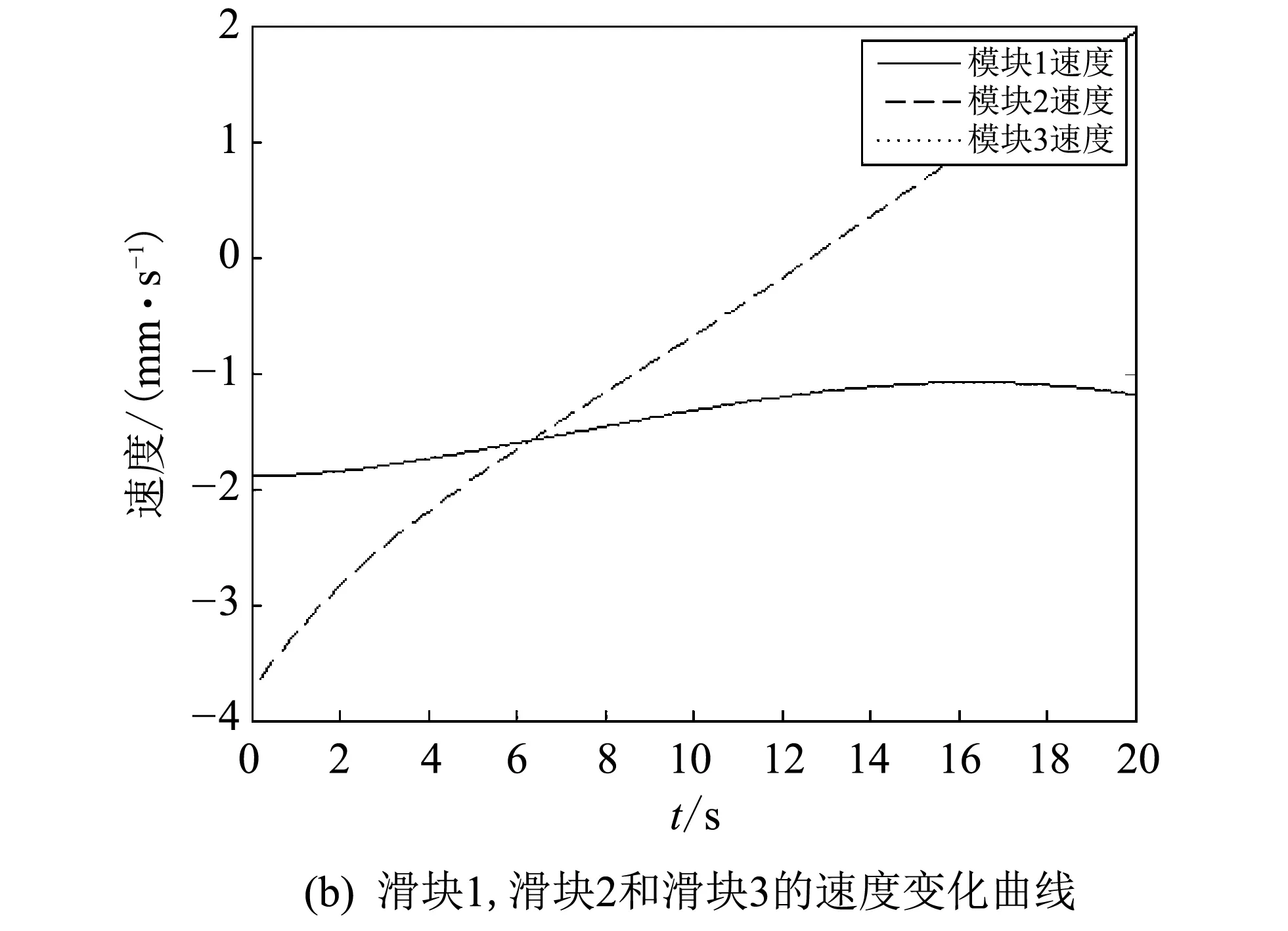
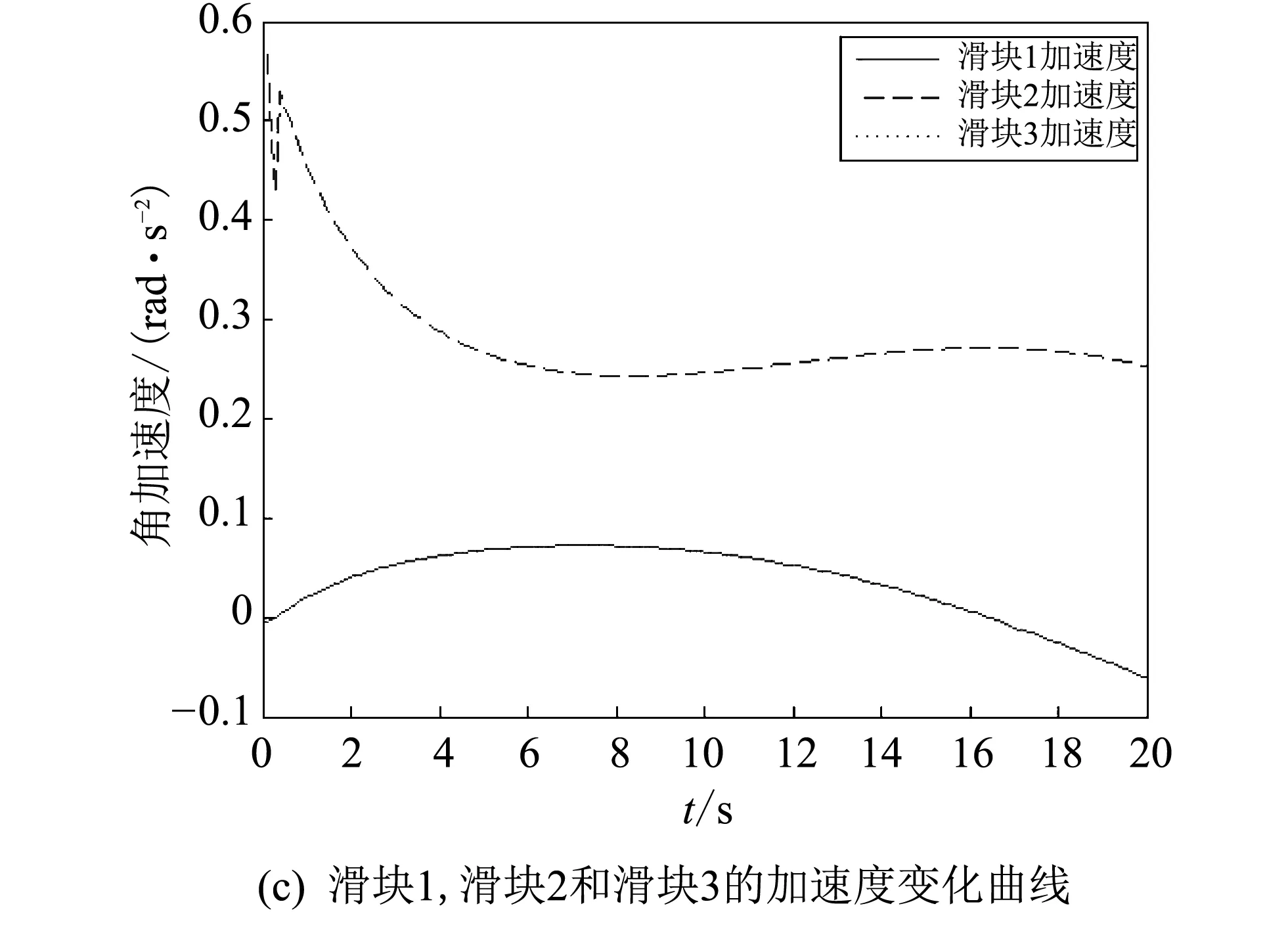

图 5HRDM的运动变化曲线
由图 5 可以看出,3条PSS支链由于结构的对称性和参数完全一样,得到的驱动滑块1和驱动滑块3的位移、速度和角加速度完全一样.动平台参考点O2的速度沿直线匀速运动时,驱动器的最大位移量均在其运动范围内,驱动器的最大运动速度在电动机的额定运动速度之内,加速度变化平缓,有利于机构的运动控制.
4 结 论
本文提出了新型3-DOF 3-PSS-6R 混合冗余驱动机构,建立了机构的几何模型和运动学方程,利用DH矩阵得到中间混合冗余驱动支链的逆解,矢量法得到对称3条PSS支链的逆解.主要得出以下结论:
1) 新型3-DOF HRDM自由度由中间支链约束,该支链由常速电机和伺服电机共同驱动,是机构的主要动力来源;
2) 应用坐标变换方法和矢量法所建立的HRDM的位置方程对于3-DOF该方法是正确有效的,运动学模型的建立为后续3-PSS/6R并联机构动力学分析及控制系统的开发奠定了基础.
