一种雷达目标俯仰角判定方法
2019-05-07孙双锁俞万友
梁 波,孙双锁,俞万友
(华域汽车系统股份有限公司,上海 200041)
1 引言
高级驾驶辅助系统 (Advanced Driver Assistance System,ADAS),是利用安装于车上的雷达、摄像头等传感器采集周边环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术[1]。
雷达作为ADAS中最重要的传感器之一,由于它的高穿透、全天候、低成本等特性,受到了广泛研究和大规模应用。车载雷达通常会被安装在车辆不同的位置以适应不同的应用场景。雷达通过对周围目标进行距离、速度、角度等测量来实现对周边环境和运动目标的感知。其中,目标角度的检测比较关键。在角度测量中,传统的汽车雷达只进行方位角测量而不进行俯仰角测量。
前向雷达和前角雷达作为安装在车辆前方的雷达,可以具备对自车前方和前侧方车辆和行人的稳定跟踪以及ACC[2]、AEB[3]、FCTA等功能。由于安装在前方,为了防止在车辆行进时对前方路牌和地面低矮目标 (如窨井盖、减速带等)的误检测,雷达需要具备俯仰测角能力,否则,将造成ACC/AEB系统的误触发,影响用户体验,甚至造成后车碰撞的危险。
为实现俯仰检测,通常是在雷达俯仰方向上添加多个通道[4],通过对天线通道间的幅度差或相位差测量来实现俯仰检测。通常的方法均需要增加俯仰通道,这将增大数据运算量,在一定程度上会增加车载雷达的硬件成本。本文在不明显增加运算量的前提下,提出了一种基于天线俯仰宽窄波设计下的俯仰判定方法,该方法原理简单、计算量低、实现方便,在不影响方位测角的情况下使雷达具备了俯仰判定能力,暗室数据和道路测试数据验证了算法的有效性。
2 原始方案
典型的毫米波雷达收发天线如图1所示,其中使用微带串馈线阵天线进行射频信号收发,微带天线[5]相对于传统的喇叭天线,传感器具有体积小、方向性好、使用方便等特点。图1a左边三列,从左起分别是接收天线1、2、3,其中天线1和天线2之间的间距为λ/2,天线2和天线3之间的间距为λ,λ为雷达波长。
完成目标距离和速度解算后,为计算目标的方位角,可利用对应的目标找到3个接收天线通道的相位差信息,来计算目标的方位角,为更精确地解算目标角度,基于多基线的特点,选择1、2通道和1、3通道进行多基线比相测角。
根据比相法[6]原理,通道间的相位差ΔΦ与雷达的波达角θ的关系如公式所示。

式中:d——接收天线间距。
通过1、2通道和1、3通道间的比相:
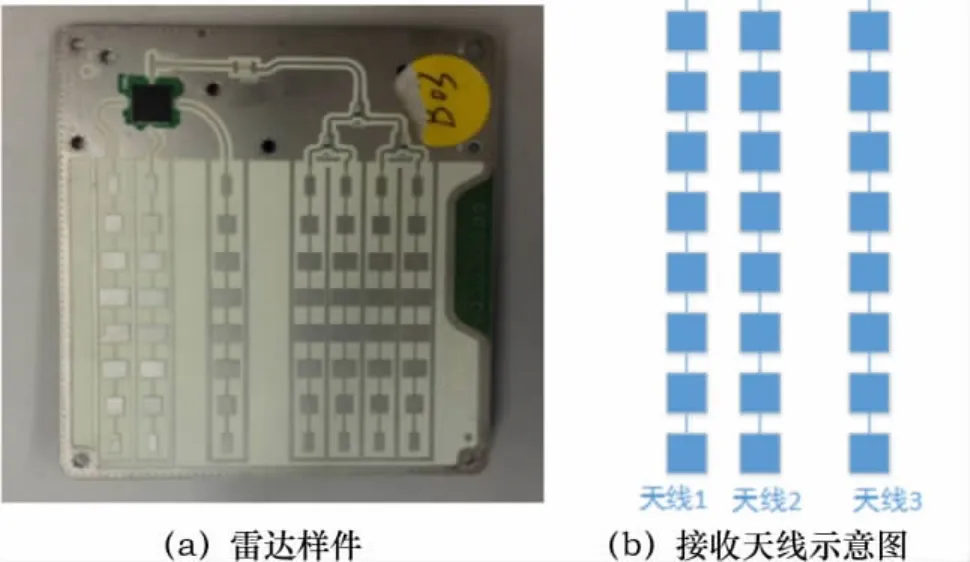
图1 雷达收发天线

式中:ΔΦ12——测得的天线1、2间的相位差。
当1、3通道解卷绕后的相位差ΔΦ13与通过公式 (2)计算得到的相位差ΔΦ′13在一定的误差之内,认为相位解算正确,并将1、3通道的相位差ΔΦ13用来计算方位角。
根据公式 (1),目标的方位角θAzi解算计算公式为:

因为无俯仰通道,该方案设计只能进行方位角度测量,不具备俯仰检测能力。
3 方案改进设计
图2为改进的雷达收发天线图。为使雷达具备俯仰判别的功能,根据雷达接收天线的特点,在不增加天线通道数情况下可通过重新设计天线俯仰波束来实现,具体如下。
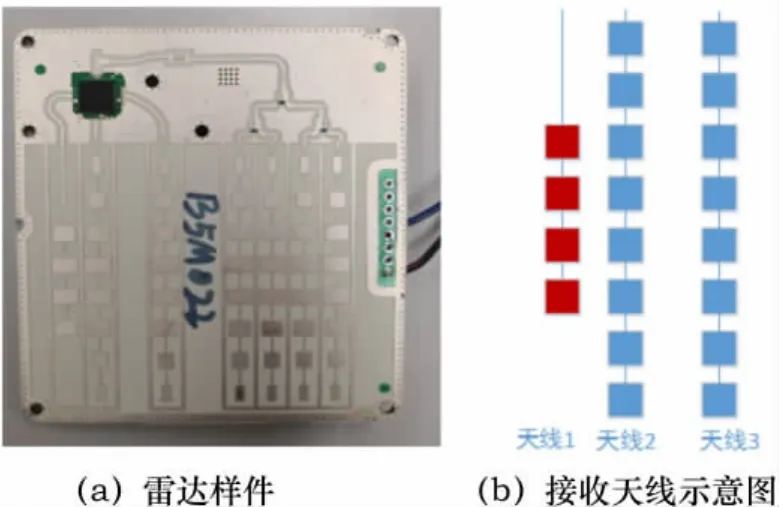
图2 改进的雷达收发天线图
针对现有雷达样件,其有3个接收天线,对其中一个天线通道进行重新设计,在俯仰方向上对称地减少天线1(或天线2)的阵列单元数,以保证其在相位中心基本不变的情况下,能够减少天线1俯仰向的孔径,从而增大天线1俯仰向的主波束宽度。这样便可利用天线2、3与天线1在不同仰角时的增益不同来进行俯仰判别。
基于以上思路,雷达的测角算法流程可描述如下。
1)参照上节内容对3个天线的信息进行多基线比相测角,得到目标的方位信息。
由于天线1的阵列单元减少,其天线增益会有所降低,为了不影响方位角的角度测量,在比相测角时采用1、2和2、3通道进行相位解模糊,并利用2、3通道的相位差做最终的方位比相测角。即:

若在天线设计中减小天线2而非天线1的阵列单元数,在进行相位解模糊后仍可采用公式 (3)进行方位测角。
2)对3通道目标信号进行比幅测角,得到目标俯仰信息。
存储目标3个天线通道的二维FFT结果,再分别计算2-1通道和3-1通道目标信号的幅度差。

式中:r、d——分别是二维FFT的两维(距离和多普勒);s(r,d)——特定目标的FFT复信号结果,下标1~3指代对应的3个天线通道。
根据实际的ΔS21和ΔS31随角度的变化设计阈值范围,首先确定水平目标的角度范围,根据此范围通过查找幅度差随角度的变化曲线确定阈值th,若ΔS21与ΔS31均大于设定的阈值th时,认为此时目标属于水平目标,否则认为目标属于非水平目标。

公式 (6)是俯仰判定的一种方法,实际中也可根据ΔS21或ΔS31建立幅度差随俯仰角度的变化表,在实际使用时通过查表来更精确地测得目标水平角度。
根据以上流程,目前的方法只适用于检测水平角度情况,无法区分非水平目标属于高处目标或低处目标。
4 试验及数据分析
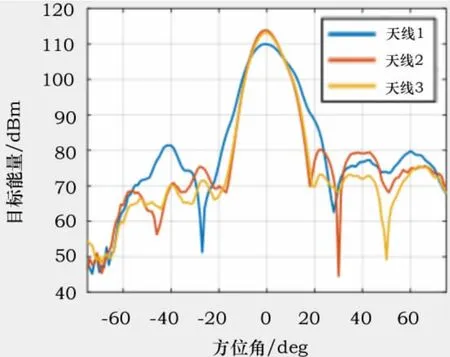
图3 各天线目标能量随俯仰角度变化曲线
对新设计的雷达样件在微波暗室进行测试,目标正对雷达天线口面放置,雷达安装在转台上,转台方位角设定为0°,俯仰角设定为-75°~75°,角度步进间隔1°。可测得样件在0°方位角情况下目标能量随俯仰角度的变化曲线如图3、图4所示,2-1通道和3-1通道的幅度差如图5所示。通过实测结果可以看出,天线1的波束变宽、主瓣峰值降低,在俯仰角-15°~15°范围内与天线2、天线3的幅度差明显,天线2-1和天线3-1的幅度差相近,实测结果与理论分析一致,可根据上节的相关方法进行俯仰角度判定。
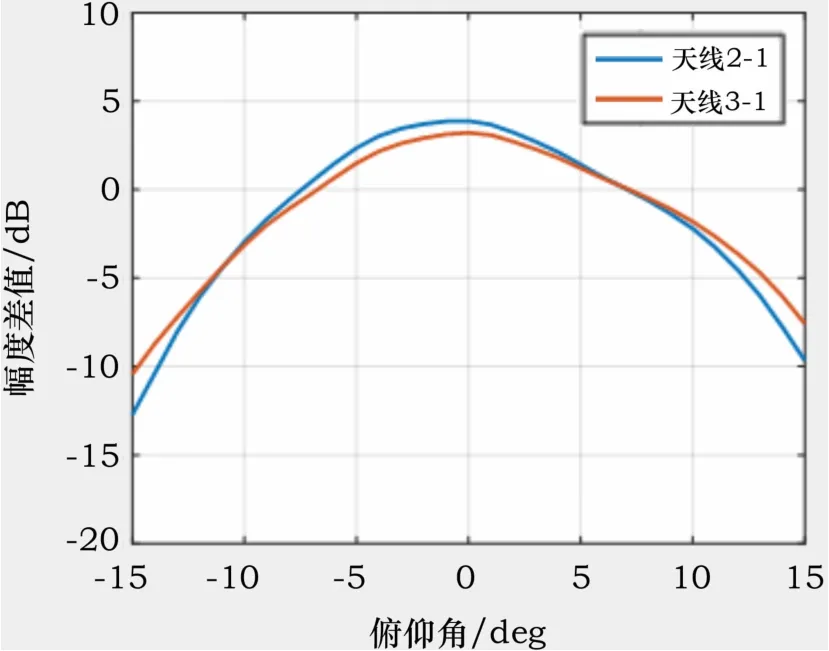
图5 雷达天线通道2-1和通道3-1幅度差随角度变化曲线
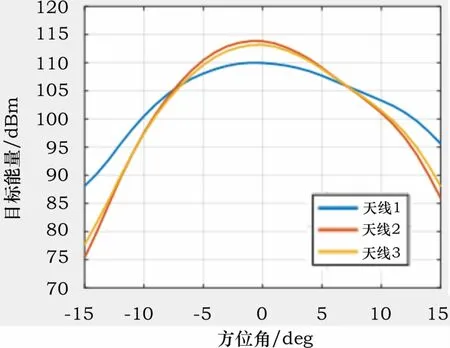
图4 各天线目标能量随角度变化曲线局部放大图

图6 地下车库测试场景

图7 道路测试场景
将前角雷达安装在测试车上,2个雷达样件分别安装在车辆前方左右角位置,主要用于监控雷达视场30 m范围内的目标。测试场景包含地下车库和地面道路上,通过安装在车辆前方的摄像头记录路试场景。实际的测试场景如图6、图7所示,左边是测试场景图,右边为雷达探测到的目标点,其中颜色标识为黑色的点表示俯仰不是水平目标的点,其他颜色均为水平目标。从图6的雷达结果可以看出,雷达能将前方地下车库屋顶的散射点标识为非水平目标;从图7的雷达结果可知,道路周边的护栏和车辆都进行了正确的检测,护栏未被错误识别为非水平目标。从上述场景可以看出,此方法能够使雷达正确地进行俯仰角判定。
为进行充分验证,通过对测试场景中所有点持续地统计分析得到,目前方法对俯仰目标的识别成功率能达到70%。鉴于此只是初步结果,后续可通过优化俯仰判断方法以及引入其他判断因子综合判断等措施来进一步提高雷达目标俯仰判定的成功率。
5 结论
本文为解决车载雷达俯仰检测问题,在不明显增加运算量的前提下,提出了一种基于天线俯仰宽窄波设计下的俯仰判定方法,该方法原理简单,实现成本较低,便于工程应用,可在不影响方位测角的情况下,使雷达具备俯仰判定能力,暗室数据和道路测试数据验证了算法的可行性和有效性。
