基于混合卡尔曼滤波器组故障传感器定位方法
2019-05-05靳成学
梁 红,靳成学
(1.中国核电工程有限公司郑州分公司,郑州450052;2.中国船舶重工集团公司第七一三研究所,郑州450015)
0 引言
对于传感器故障诊断问题,传统方法是采用降维卡尔曼滤波器组[1-5]来解决。Kobayashi使用1组卡尔曼滤波器来解决发动机传感器的故障诊断与隔离问题,每个滤波器用来监视某一特定传感器,通过滤波器的不同表现完成故障传感器的定位。在在线故障诊断过程中,为保障其诊断可靠性,系统必须具有对存在于真实环境中的非故障信号的鲁棒性,否则可能导致误报。此外,线性卡尔曼滤波器的基准数据是针对蜕化前的发动机建立的,而发动机在运行过程中会出现性能蜕化的状况[6-8]。
为了避免基准数据与蜕化后的发动机输出之间的偏差导致的干扰,设计了混合卡尔曼滤波器(Hybrid Kalman Filter,HKF),包括机载模型(On Board Engine Model,OBEM)和线性卡尔曼滤波器(Linear Kalman Filter,LKF)[9-11]。滤波器的基准值由与真实发动机并行运行的机载模型来提供。同时,性能蜕化因子由地面状态监视系统估计,根据飞行数据离线更新,从而实现机载模型的输出修正,使其追踪真实发动机的可测输出[12],使得机载模型能够为后续的故障诊断提供更为贴近真实发动机的基准数据。
1 混合卡尔曼滤波器组的搭建
基于降维卡尔曼滤波器组的故障传感器定位,本质上是1种基于模型的故障诊断方法,具体的实现过程有残差产生和残差决策2个阶段。残差产生是指基于系统模型构造1个或1组函数来反映故障量的大小;残差决策是基于已生成的残差值,制定恰当的阈值和决策规则来寻找故障源的过程[13]。混合卡尔曼滤波器结构如图1所示。混合卡尔曼滤波器输出的残差包括2部分:卡尔曼滤波器估计输出与机载模型健康基准输出之间的残差加权平方和;发动机实际输出与机载模型健康基准输出之间的残差加权平方和。混合卡尔曼滤波器中残差WSSR的计算方式如图2所示。
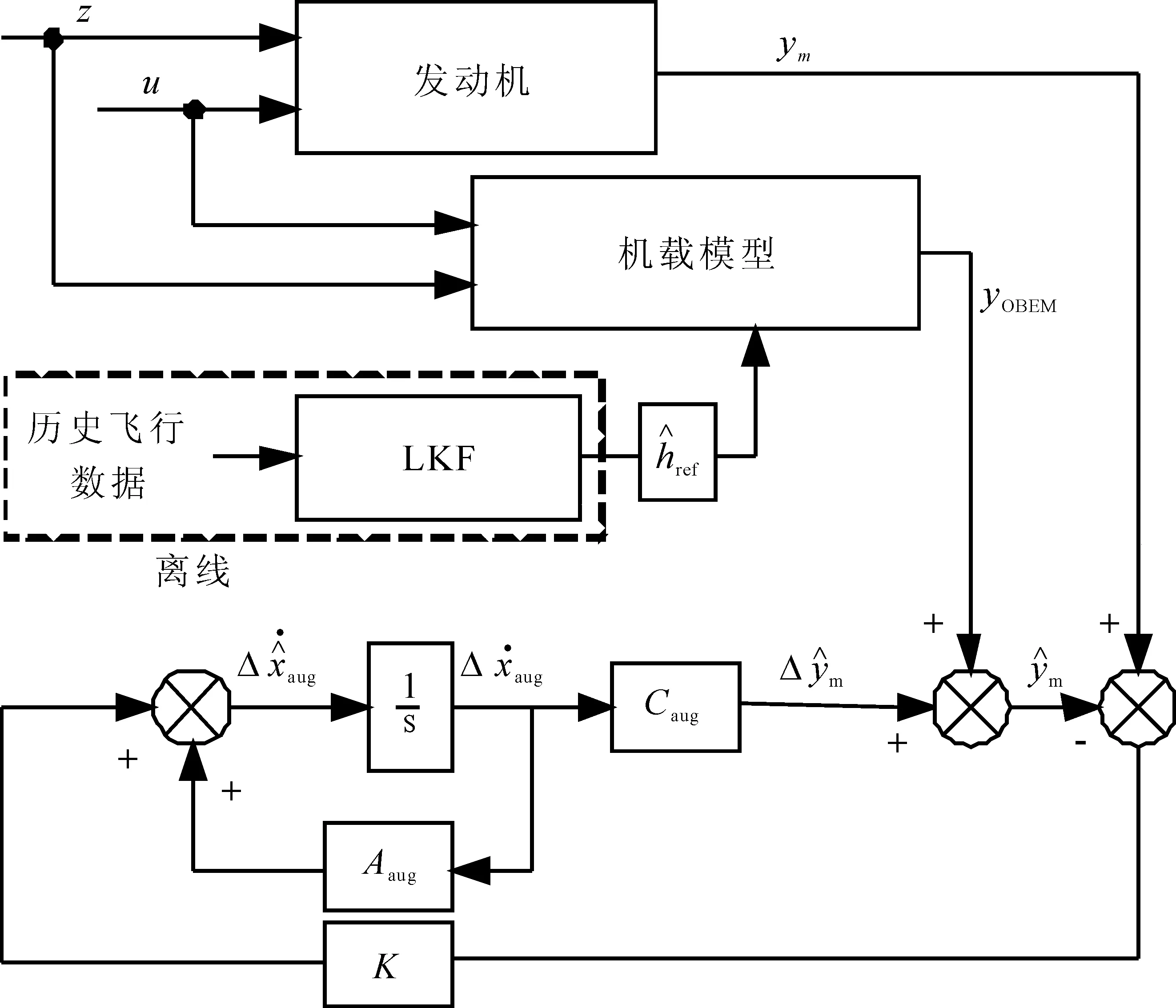
图1 混合卡尔曼滤波器结构
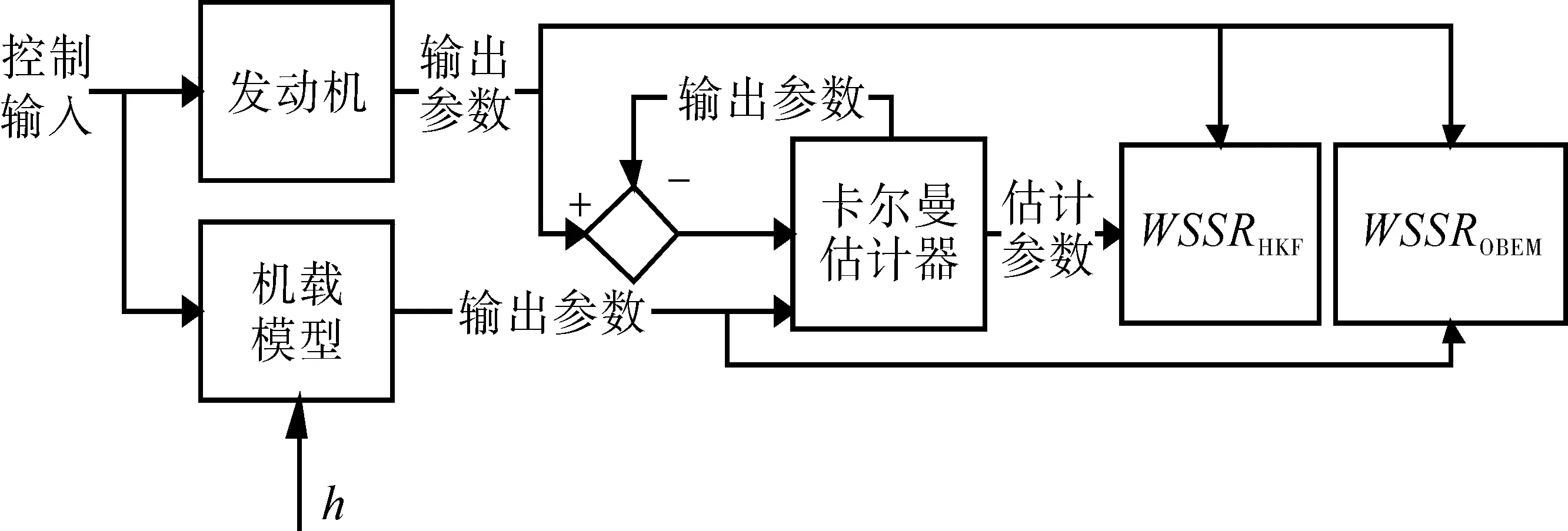
图2 滤波误差加权平方和WSSR指示故障原理
降维混合卡尔曼滤波器组原理如图3所示。在滤波器组中,滤波器的数量与传感器的数量相同,每个滤波器都缺少1个传感器信号输入。与传统的滤波器组相比,混合卡尔曼滤波器增加了对应的机载模型健康基准信号,与传感器输出一样,OBEM的输出也是将除去被监测的可测参数后剩余可测参数的输入子集作为滤波器输入。OBEM输出和发动机传感器测量值是一一对应的。
降维卡尔曼滤波器组中第i个卡尔曼滤波器对应的WSSRi为

降维混合卡尔曼滤波器组的故障定位过程与健康蜕化估计过程如图4所示。第1步是由估计值和传感器测量值的偏差产生残差信号,第2步是残差与阈值的比较。基于Hajiyev等[15]提出的1个假设,如果传感器有故障,则该传感器的测量值将会大大偏离正常值。若卡尔曼滤波器在估计过程中受到故障传感器信息的不利影响,该卡尔曼滤波器产生的残差值WSSR便会显著增大;反之残差值应该小到几乎为0。因此,在第i个传感器发生故障的情况下,第i个HKF没有接收到第i个传感器的输入,但其余HKF均受到第i个传感器的错误信息影响,则第i个卡尔曼滤波器计算所得的WSSR会显著小于其余WSSRHKF的值。以上就是传感器故障定位的原理。如果第i个卡尔曼滤波器计算的WSSR的值大于其对应的阈值,说明除了传感器故障外,机载模型健康基准与实际发动机之间还存在由于发动机部件健康蜕化导致的偏差,需要根据该卡尔曼滤波器估计所得的健康参数定位蜕化部件和确定蜕化量大小,并将估计的健康蜕化信息传输给OBEM从而完成在线调节机载模型健康基准的过程,使得机载模型健康基准计算与发动机可测输出重新匹配。
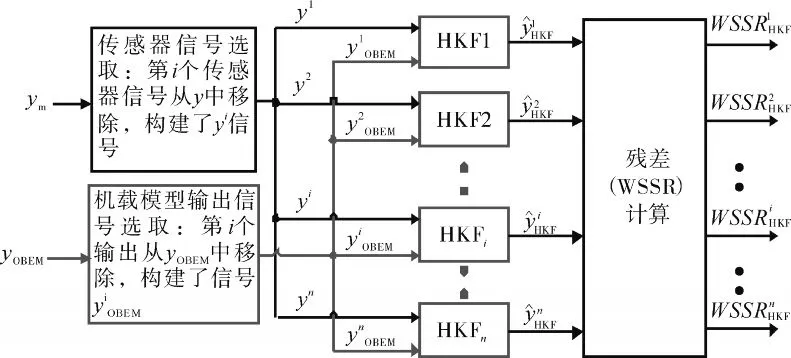
图3 降维混合卡尔曼滤波器组原理
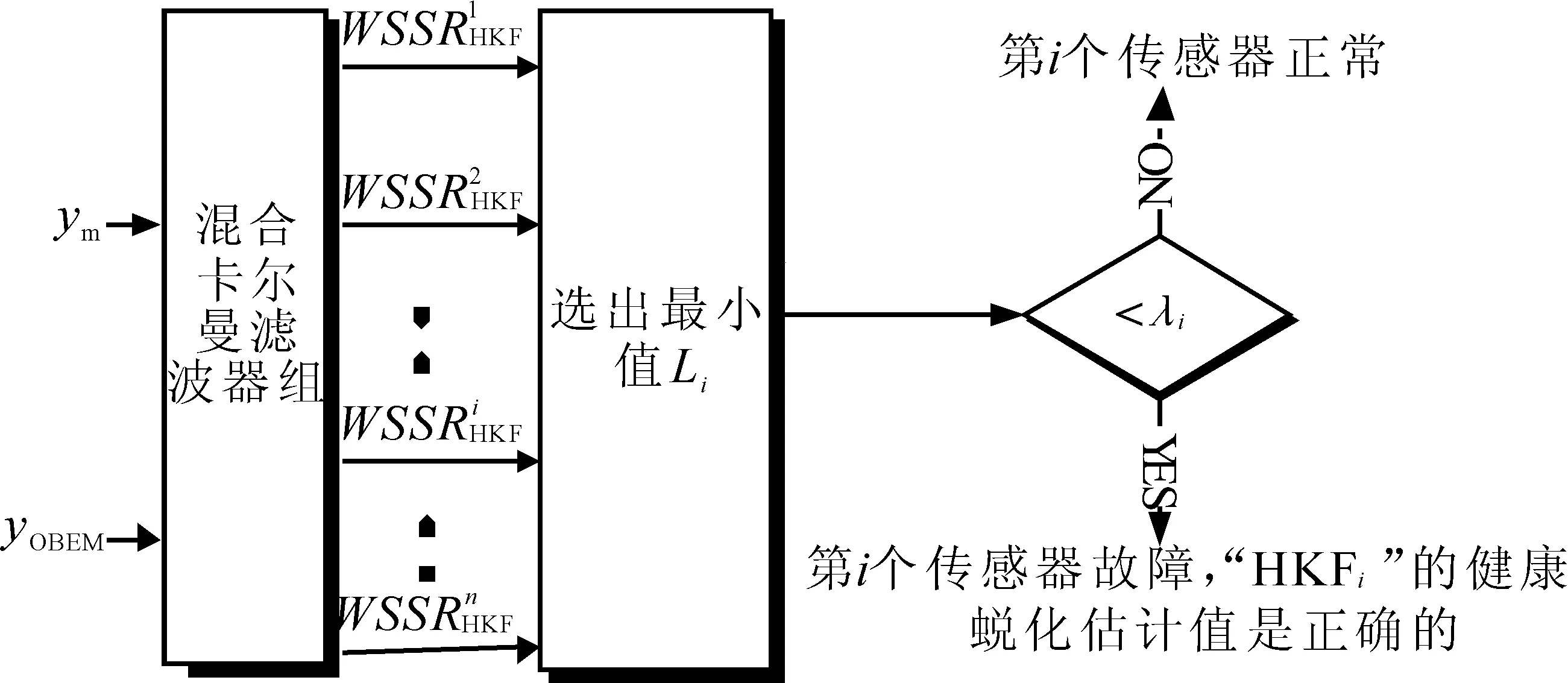
图4 定位及筛选逻辑
前面多构建的混合卡尔曼滤波器组是针对单一传感器故障构建的。针对多个传感器故障的情况,需要引入多重故障监测系统,其诊断原理与单故障诊断系统的相同。
2 混合卡尔曼滤波器组的仿真验证
第1组仿真将使用过渡态工况作为示例,说明混合卡尔曼滤波器在过渡态下的估计精度优势。机载模型健康基准采用双轴涡扇发动机非线性模型,在MATLAB平台下进行在线故障诊断仿真。在t=1 s时风扇效率阶跃下降1%,高压压气机效率同时阶跃下降1%,而供油量增加0.2 kg/s。在过渡态下混合卡尔曼滤波器和线性卡尔曼滤波器的估计结果如图5所示。
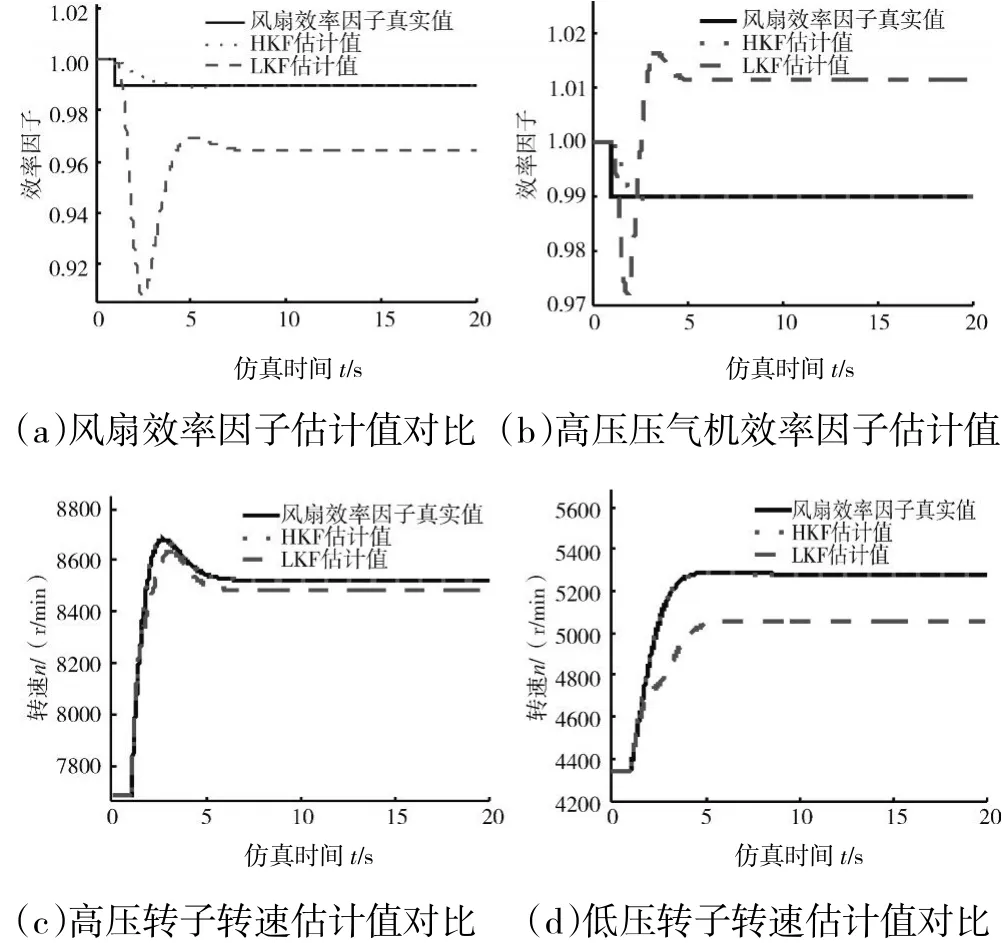
图5 混合卡尔曼滤波器和线性卡尔曼滤波器在过渡态下的验证对比
从图中可见,在过渡态下混合卡尔曼滤波器的估计精度较高,说明混合卡尔曼滤波器能适应更加复杂的情况。
第2组仿真用于验证混合卡尔曼滤波器组的故障定位能力。在t=1 s时风扇效率阶跃下降1%,高压压气机效率同时阶跃下降1%。其他输入和健康参数保持在原来的状态。同时,监测发动机风扇出口总压的传感器发生了故障。降维滤波器计算的对应传感器的残差加权平方和的仿真结果如图6所示。
从图中可见,监测风扇出口总压传感器的滤波器输出残差几乎保持不变,其余残差变化很大,说明航空发动机风扇出口总压传感器发生了故障。成功定位了故障传感器。

图6 各降维滤波器计算对应传感器的残差加权平方和
3 结论
本文建立了用于故障传感器定位的混合卡尔曼滤波器组,该滤波器组能够在过渡态下保证估计精度,而且能有效定位故障传感器。相关的仿真结果表明,在发动机健康蜕化与传感器故障并存的情况下,混合卡尔曼滤波器组能够根据不同卡尔曼滤波器的表现定位故障传感器,并获得较为准确的健康蜕化估计结果。证明了混合卡尔曼滤波器组的适用性。
