车辆前向防碰撞主动预警系统设计
2019-05-04李阳娟
李阳娟
(莆田学院 工程实训中心,福建 莆田,351100)
数据研究表明,“跟车距离太近”是车辆最危险的驾驶行为之一[1],撞车事故易引发侧翻、落水、起火燃烧等恶性交通事故[2],交通运输部专门为此制定了《JT/T 1094-2016》标准,该标准要求自2018年4月1日起,新生产的9米以上营运客车需安装前向防碰撞预警系统[3]。
车辆前向防碰撞预警系统(forward collision warning system,FCWS)是一种主动型安全系统,该系统通过毫米波雷达传感器实时监测前方车辆,结合自车运行状态,通过卡尔曼滤波算法对前向有效目标车辆进行定位,通过两级预警策略算法,在车辆有前向碰撞风险时,向驾驶员发出语音、方向盘和坐垫震动等预警信号,真实道路实车试验表明,本系统能有效避免车辆前向碰撞事故的发生。
1 系统组成
同摄像头、超声波等其余测距方案相比,毫米波雷达穿透能力较强,尤其适用于复杂环境条件下的主动防撞预警应用。本文设计的FCWS系统组成如下图1所示。其中,车载电脑(主要包括仪表、主机等)负责采集车辆的相关运行参数(如车速、转向和制动等信息),并通过CAN总线发送至FCWS控制器;FCWS控制器通过预警策略算法进行防碰撞预警决策,相关预警信号以视觉、听觉及触觉等方式发出。
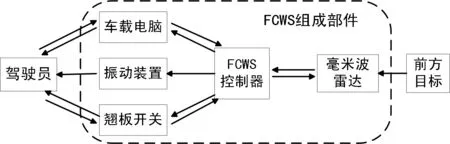
图1 FCWS系统组成框图Fig.1 Composition block diagram of the FCWS system
预警系统毫米波雷达选用Delphi公司的多模雷达(electronically scanning radar,ESR),工作频段为76GHz~77GHz,该雷达有两种工作模式:中距离模式和长距离模式,中距离模式视角比较宽,可以发现前向±45°的车辆,便于发现临近车道车况;长距离模式最长可探测175m处目标,两种模式相结合,可以对车间距离及相对速度进行精确测量,雷达主要性能参数见表1所示[4]。
表1 ESR主要参数
Table 1 Key parameters of ESR
FCWS控制器采用LPC1769处理器,外设接口丰富,内部集成两路CAN控制器,具备高性能、低功耗、实时处理的特点[5]。FCWS系统控制器原理框图如图2所示。
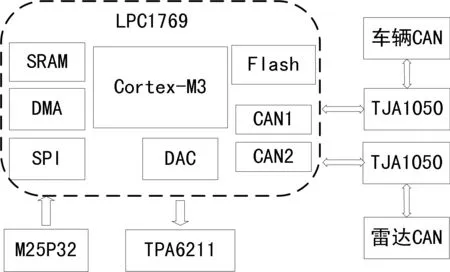
图2 FCWS系统控制器原理框图Fig.2 Schematic diagram of FCWS system
预警信号可通过语音、方向盘振动和指示灯闪烁三种方式提醒驾驶员,其中语音提醒采用低成本的解决方案,语音文件以*.wav的格式存储在Flash芯片中;处理器通过SPI总线从Flash中获取语音后,进行解码并转换成模拟信号;该信号经过音频放大电路后送给扬声器输出。电路原理图如图3所示。
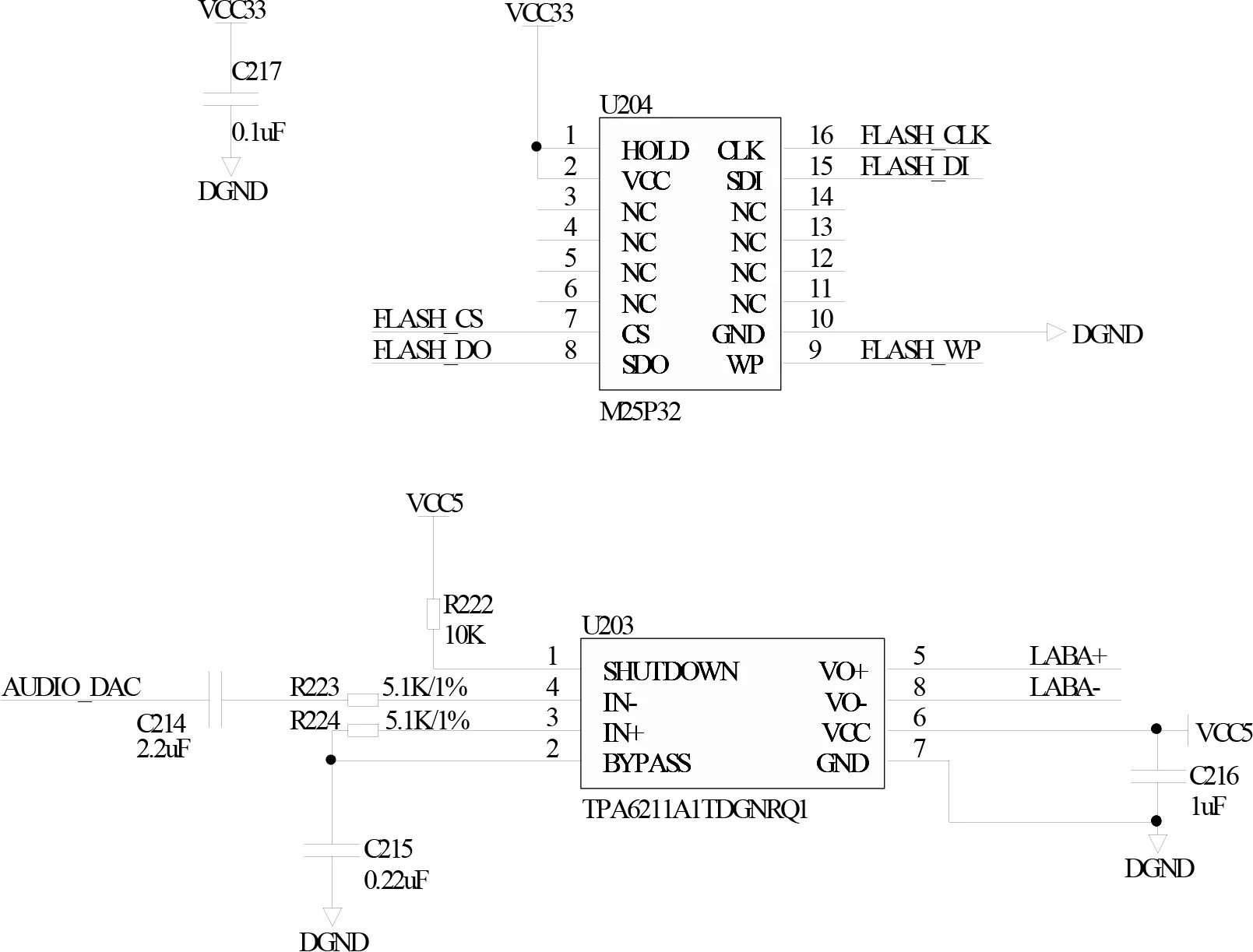
图3 语音存储及放大电路Fig.3 A diagram of voice storage and amplification circuit
方向盘振动通过处理器输出PWM信号控制功率场效应管驱动直流电机来实现;通过控制PWM信号,使振动提醒由弱渐强,电机驱动电路如图4所示。
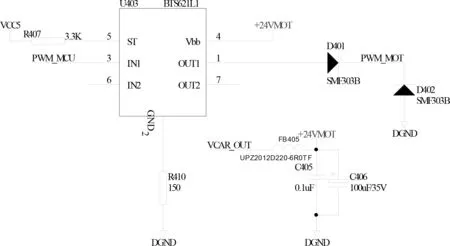
图4 振动电机驱动电路Fig.4 A diagram of the driving circuit of a vibration motor
预警系统在真实道路交通环境下开展了实车测试,测试车辆为一辆12米客车,测试道路一侧有护栏及路灯杆,自车车道及邻近车道前方均有车辆行驶,并且车辆存在变道动作。如下图5所示。
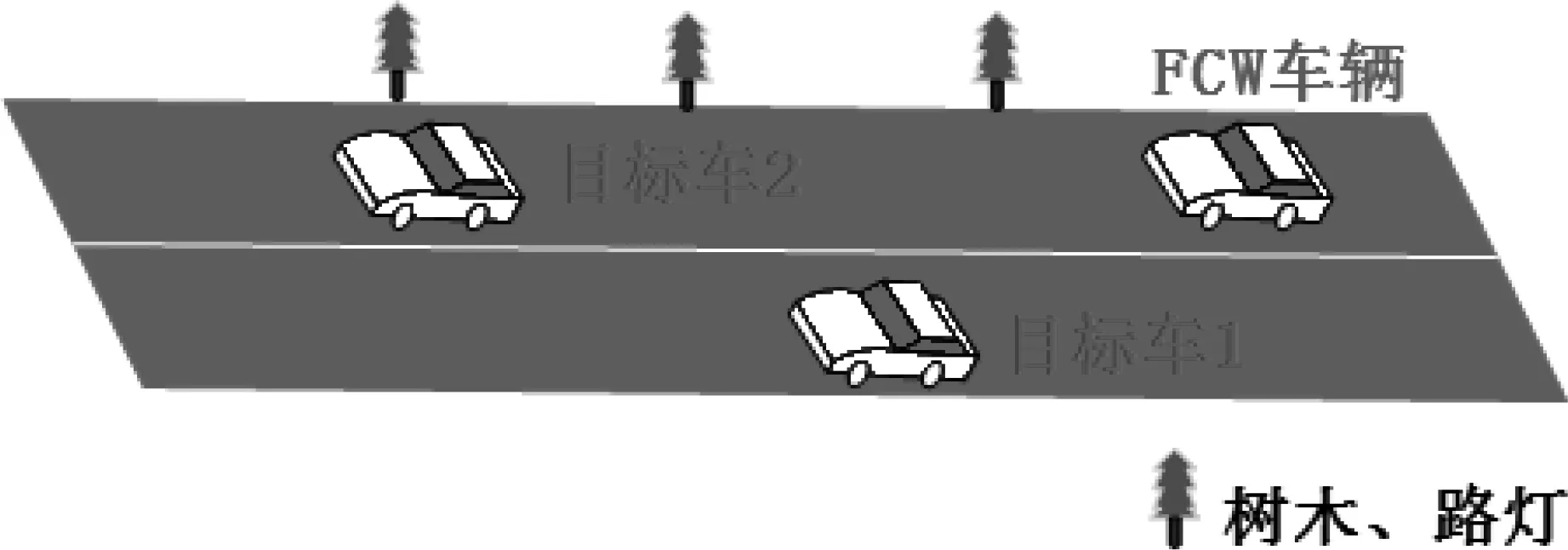
图5 测试过程典型场景Fig.5 Typical scenarios of test process
2 有效目标车辆定位算法及试验结果
由于毫米波雷达在实际工作过程中,会受到道路两旁树木、路灯等设施的干扰,同时由于目标回波能量不均匀还会出现虚假目标[6]。因此,需要对接收信号进行预处理,以便从多个探测目标中确定出危险性最大的目标车辆。
预警系统有效目标车辆定位算法中,优先处理动态目标和近距离目标,对探测到的目标横向距离进行过滤,之后采用卡尔曼滤波算法进行跟踪预测。
在行车过程中,危险性最高的是距离自车最近的目标;因此,定位算法通过计算目标的横向距离x来判断目标是否需要优先监测,即判断是否满足
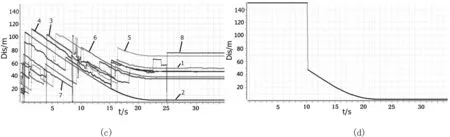
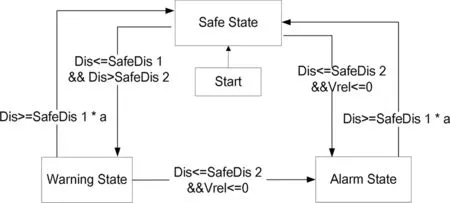
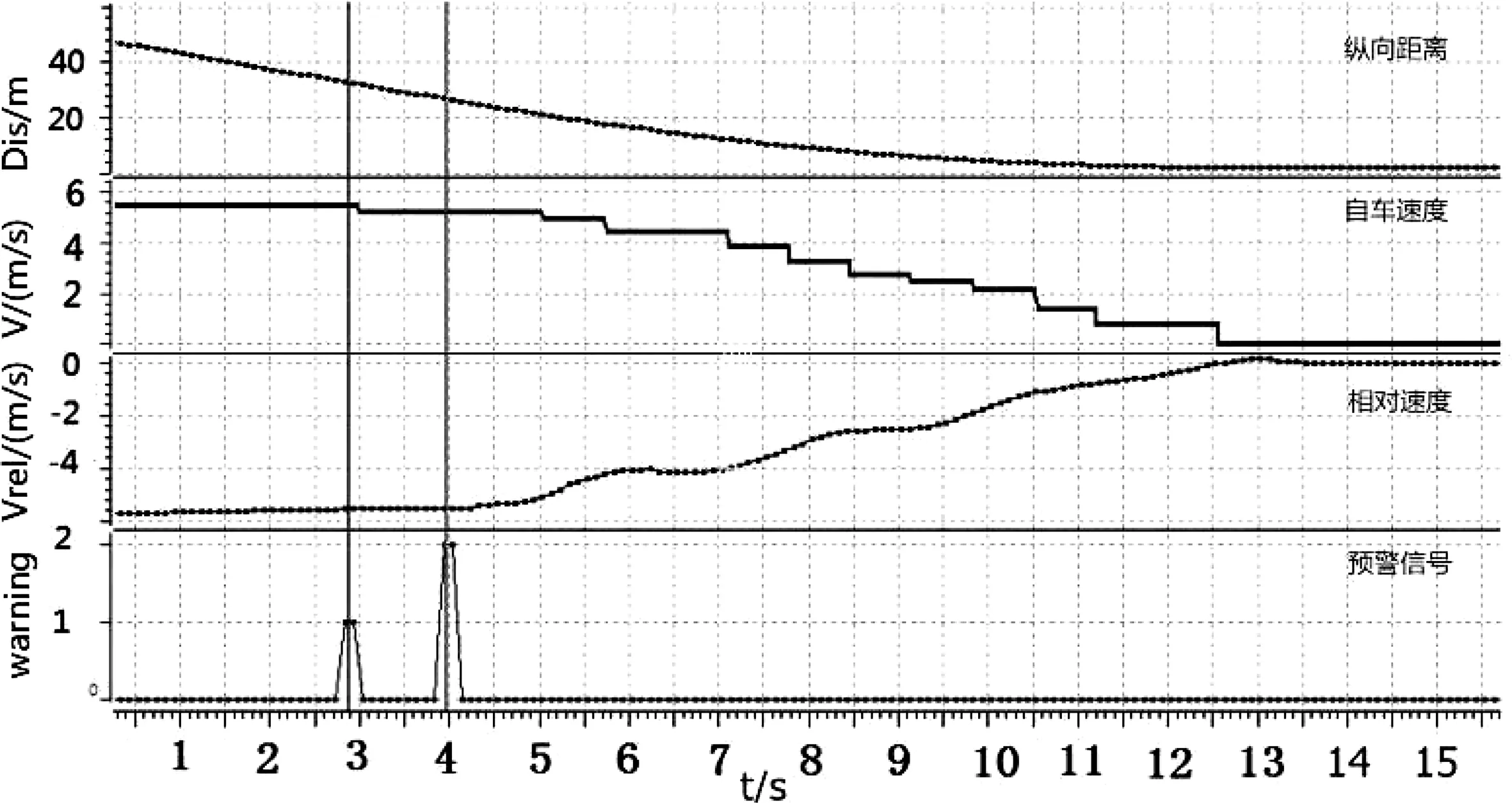
x (1) 其中:x0值取车道宽度的1/2。 对满足式(1)的目标通过卡尔曼滤波算法预测下一探测周期内该目标的状态[7],如下: (2) 式(2)中:d(n)、v(n)和a(n)分别为周期内系统监测到的目标纵向间距、相对速度和相对加速度;t是雷达监测周期,数值为0.05s;d(n+1)n、v(n+1)n和a(n+1)n为下一监测周期中目标的预测值,下一监测周期中雷达的监测值应与预测值在一定的误差范围内。 预警系统从以上过滤后的目标中,挑出纵向距离最小的目标,则为最危险目标。具体定位算法为:雷达返回目标车辆的横向距离xn,纵向距离dn;通过判断xn 对车辆定位算法进行实车测试,结果如图6所示,其中图6(a)、图6(b)为雷达监测目标的横向距离变化过程(纵坐标LatDis为横向距离,横坐标为时间);图6(c)、图6(d)为雷达监测目标的纵向距离变化过程(纵坐标Dis为纵向距离,横坐标为时间)。第一步,根据横向距离小于车道宽度的1/2这一条件,将图6(a)中8个目标车辆(已用数字进行标识)排除5个,剩余3个目标车辆如图6(b);第二步,从各目标车辆纵向距离图6(c)中根据第一步得到的3个目标车辆进行卡尔曼滤波,并比较得到与自车距离最近的目标;图6(d)为最终需要安全监测的有效车辆目标的纵向距离。 1-8:车辆编号图6 雷达目标挑选过程Fig.6 Target identification process by using radar 现有FCWS主要是基于安全车距的预警策略,模型由两部分组成:反应距离和制动距离。其中反应距离是指驾驶员意识到与前车可能存在碰撞风险,但还没有制动动作,在这个反应时间内自车行驶的距离,制动距离是指从驾驶员制动动作发生到车辆完全停止期间自车行驶的距离[8-11]。本系统安全车距的计算公式为 LSafeDis=V×Tr+Vrel×TTC (3) 其中:LSafeDis为安全车距;V为自车车速;Tr为动态调节因子(取决于驾驶员疲劳程度、驾驶经验、车辆使用年限、维保状态以及环境等多方面因素);Vrel为两车相对速度;TTC(time to collision,TTC)为距碰撞时间,可通过车载电脑进行配置,反映系统报警灵敏度等级。当毫米波雷达所探测的车间距离小于计算得到的动态安全车距时,即判断为可能发生潜在的碰撞危险。 预警系统采用两级预警策略:初级碰撞预警及碰撞预警。初级碰撞预警用来预警潜在危险目标,需要驾驶员提高注意力;碰撞预警则是用来提醒驾驶员倘若继续当前状态行驶,则会在一定时间内发生前向碰撞,必须减速或者换道[12]。两级预警策略如图7所示,其中:Safe State为无碰撞危险状态,Warning State为初级碰撞预警状态,Alarm State为碰撞预警状态;SafeDis1是初级碰撞预警的安全距离,SafeDis2是碰撞预警的安全距离,具体数值由式(3)计算得到,其中TTC均取3.0s,SafeDis1对应的Tr比SafeDis2对应的Tr取值大。Tr的取值应避免使报警过于频繁,并能有效区分两级报警间距;测试实验中Tr取1.0s。图7中参数a是从报警状态退出到安全状态时的迟滞系数,具体实验中取值1.05,Vrel为两车相对速度。 图7 系统报警控制逻辑示意Fig.7 A schematic diagram of system warning control logic 实车试验结果如下图8所示,展示了叠加驾驶员预警反应时间及施加制动动作之后的实验数据,图8中纵坐标Dis为两车纵向距离、V为自车速度、Vrel为两车相对速度,warning为预警信号。实验结果显示,系统初级碰撞预警信号(warning=1)在碰撞前5.48s产生,碰撞预警信号(warning=2)在碰撞前4.48s产生,满足JT/T883-2014规定的“不小于2.70s时发出警告”的要求。 1-初级碰撞预警信号;2-碰撞预警信号图8 报警时机Fig.8 Warning timing 以毫米波雷达和LPC1769微处理器为硬件核心,采用基于卡尔曼滤波的目标挑选算法和基于智能传感和车联网技术的动态安全车距控制模型,设计了FCWS的解决方案。实际道路测试结果表明,预警系统在典型道路工况及多种气候环境条件下能够稳定跟踪障碍目标,及时有效地提醒驾驶员潜在碰撞危险,有效减少追尾碰撞事故的发生。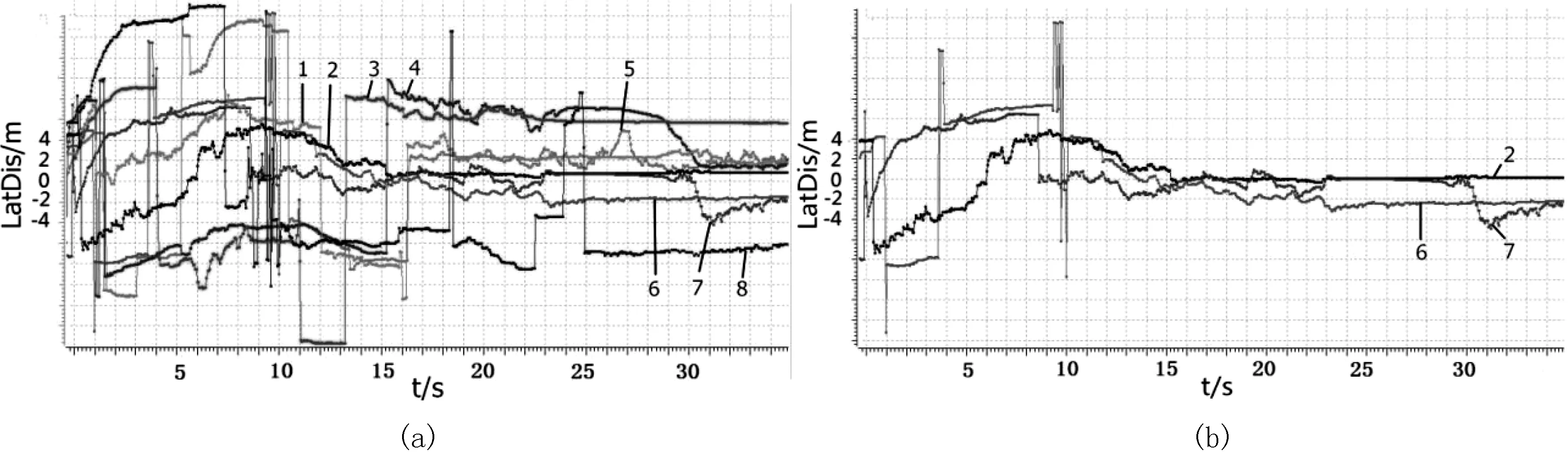
3 两级预警策略算法及试验结果
4 结语
