电机驱动操动机构永磁同步电机矢量控制策略
2019-04-28何保营何大伟田会青
何保营,邓 渊,何大伟,田会青,刘 宇
(平高集团有限公司,河南 平顶山 467001)
0 引 言
高压断路器操动机构是控制断路器进行分闸和合闸操作的机构, 对高压断路器的工作性能和可靠性起着极为重要的作用。目前比较常用的操动机构主要有弹簧操动机构、气动操动机构和液压操动机构等,但是这些机构结构复杂,传动部件多,故障率较高[1]。电机驱动操动机构是一种新型的高压断路器操动机构。与传统的操动机构相比,电机驱动操动机构只有一个转动的电机转子部件, 运动的部件和直接撞击的部位少、噪音小、运行安全可靠。此外,电机伺服控制器内部设置的位置、电流、电压传感器可以实现对操动机构和断路器的在线监测,实现断路器的智能化[2]。
本文研究了一种使用永磁同步电机(PMSM)驱动高压断路器的技术,通过对永磁同步电机控制策略进行对比比较,找寻最优的矢量控制方法,最大的提升电机驱动断路器的性能。
1 永磁同步电机及其数学模型
20世纪80年代,永磁材料特别是具有高磁能积、高矫顽磁力、低廉价格的铷铁硼永磁材料的发展,是人们研制出了价格低廉、体积小、性能高的永磁电机。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)作为永磁电机的一种,不需要励磁电流,效率和功率因数都比较高,与同容量的异步电机相比,体积更小[14-15]。而且PMSM的矢量控制系统能够实现高精度、高动态响应、大范围的速度和位置控制,尤其是在数控机床和机器人等技术对高精度、高动态响应以及体积小的伺服驱动需求不断增长的情况下,PMSM电机控制系统逐渐成为主流[3-6]。
在理想电机模型的假设条件下,可以得到PMSM在转子定向的同步旋转坐标系下的数学模型[7-13]。
定子电压方程:
Ud=pΨd-Ψqωr+rid
(1)
Uq=pΨq+Ψdωr+riq
(2)
定子磁链方程:
Ψd=Ldid+Ψr
(3)
Ψq=Lqiq
(4)
电磁转矩:
Tem=pn(iqΨd-idΨq)=pn(Ld-Lq)idiq+pnΨriq
(5)
2 永磁同步电机及其数学模型
矢量控制一般通过检测或估计电机转子磁通的位置来实现很高的控制性能。而对于永磁同步电机,转子磁通位置与转子机械位置相同,这样,只需要检测转子实际位置就可以得知电机转子磁通位置,因此,与异步电机矢量控制相比,永磁同步电机的矢量控制大大简化了[16-18]。永磁同步电机矢量控制结构框图如图1所示。
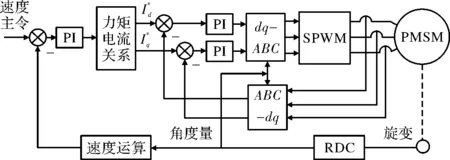
图1 PMSM矢量控制结构框图
由式(5)中的电磁转矩公式可以看到,PMSM的电磁转矩与id、iq相关。因此,在图1所示的矢量控制结构图中,采用不同的电流控制方法,可以得到不同的控制效果。
2.1 id=0控制
对于PMSM来说,大多采用d轴电流为0的控制方式。在这种情况下,电磁转矩Tem与iq为线性关系。因此,只需要对iq进行控制,即可控制电机的转矩。控制简单、计算量小,电动机工作在额定转速以下的恒转矩区。
2.2 最大转矩电流比控制
最大转矩电流比控制(Maximum Torque per Ampere, MTPA)是凸极式PMSM使用较多的一种电流控制策略。在凸极PMSM中,Ld≠Lq,因此电磁转矩公式中含有dq轴电流的乘积项。最大转矩电流比控制可以在产生相同转矩的情况下,使得定子电流最小,从而提高系统效率,减轻逆变器负担。
若定子电流的幅值为I,由Park变换可得id、iq与I之间的关系为

(6)
所以,
(7)
最大转矩电流比控制实际上是求解一个最优化问题:
(8)
若将id、iq用定子电流的幅值来表示:
id=Icosθ
iq=Isinθ
(9)
式中,θ为I与id的夹角,将式(9)代入式(5)可以得到
Tem=pn(Ld-Lq)I2sinθcosθ+pnψrIcosθ
(10)
则在I恒定的情况下,可以得到电磁转矩θ与之间的关系如图2所示。图中,直线为iq产生的转矩,称为同步转矩分量,虚线为id、iq乘积产生的转矩,称为磁阻转矩分量,双点划线为两者之和,即电磁转矩。可以看出,在I恒定的情况下,电磁转矩存在一个最大值。
对式(10)求导可以求出电磁转矩取最大值时对应的角度θ为
(11)
2.3 弱磁控制
由于电机的电动势与频率和磁通的乘积成正比。而在磁通不变的情况下,受绝缘等因素的影响,电机的电动势无法超过电机的额定电压,因此,在磁通不变的情况下,电机的转速时受限的。而若要在电机电动势达到额定电压后继续提高转速,必须减小磁通,即弱磁控制。异步电机和传统的同步电机均可以通过控制励磁电流来实现若此控制。而PMSM的转子是永磁体,本身具有一个恒定的磁通,在实现弱磁控制时需要产生一个电流来抵消磁通。
电机在高速稳定运行时,忽略定子电阻,式(1)、式(2)所示的PMSM电压方程可写为如下形式:
ud=-ωrLqiq
(12)
uq=ωrLdid+ωrψr
(13)
定子端电压的幅值us与ud、uq有如下关系:
(14)
而定子端电压不能超过额定电压,所以有
(15)
将(12)、式(13)代入式(15),得到永磁同步电机的电压极限:
(16)
此外,由于定子电流不得超过额定值,得到永磁同步电机的电流极限:
(17)
在id-iq坐标平面上表示式(16)、式(17),如图3所示,前者为一个椭圆,后者为一个圆,受到电机电压极限和电流极限的限制,电机的电流必需在椭圆和圆重叠的区域内。如图3所示,当电机运行至额定转速以上时,端电压达到极限值ulim,此时若继续提高转速,会使得电压极限椭圆缩小,如图3所示从ω1增至ω2时电压极限椭圆的变化情况。此时,电压极限椭圆和电流极限圆的交点从A点变为C点,控制电流矢量从A点移动到C点,可以实现电机的恒功率运行。即需要增大d轴电流,减小q轴电流。实际控制中,可以通过控制d轴电流或电流超前角β来控制逆变器的输出功率恒定,将转速提高。从图3还可以看出,若转速继续上升,电压极限椭圆继续缩小,至其与电流极限圆的交点为D时,转速达到理论最大值,此速度为弱磁控制的极限速度,此时d轴电流达到电流极限值,q轴电流为0。
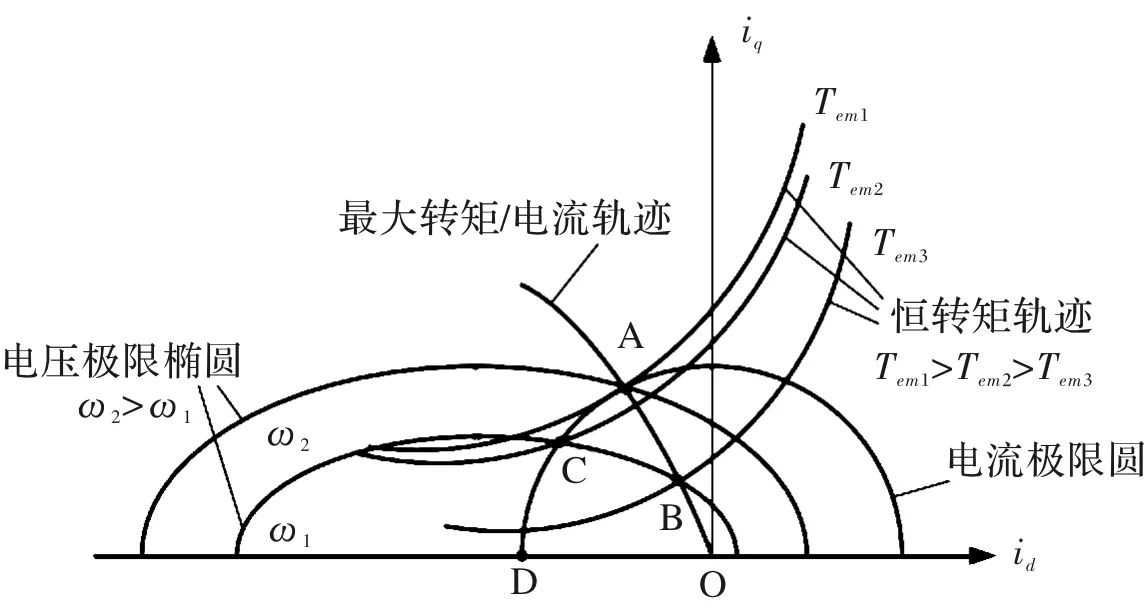
图3 永磁同步电机的电压极限椭圆和电流极限圆
在进行弱磁控制时,需要判断电机在何时进入恒功率区,在恒转矩区,仍然进行id=0控制或MTPA最大转矩电流比控制,当电机转速进一步上升,进入恒功率区时,切换至弱磁控制。图4、图5分别给出了两种弱磁控制策略:分别是超前角弱磁控制和电压外环弱磁控制。

电压外环弱磁控制室将ud、uq计算出的定子电压与最大定子电压umax比较后,通过PI调节器直接输出id的给定值,然后通过式(17)计算得到iq给定值。

图4 永磁同步电机超前角弱磁控制
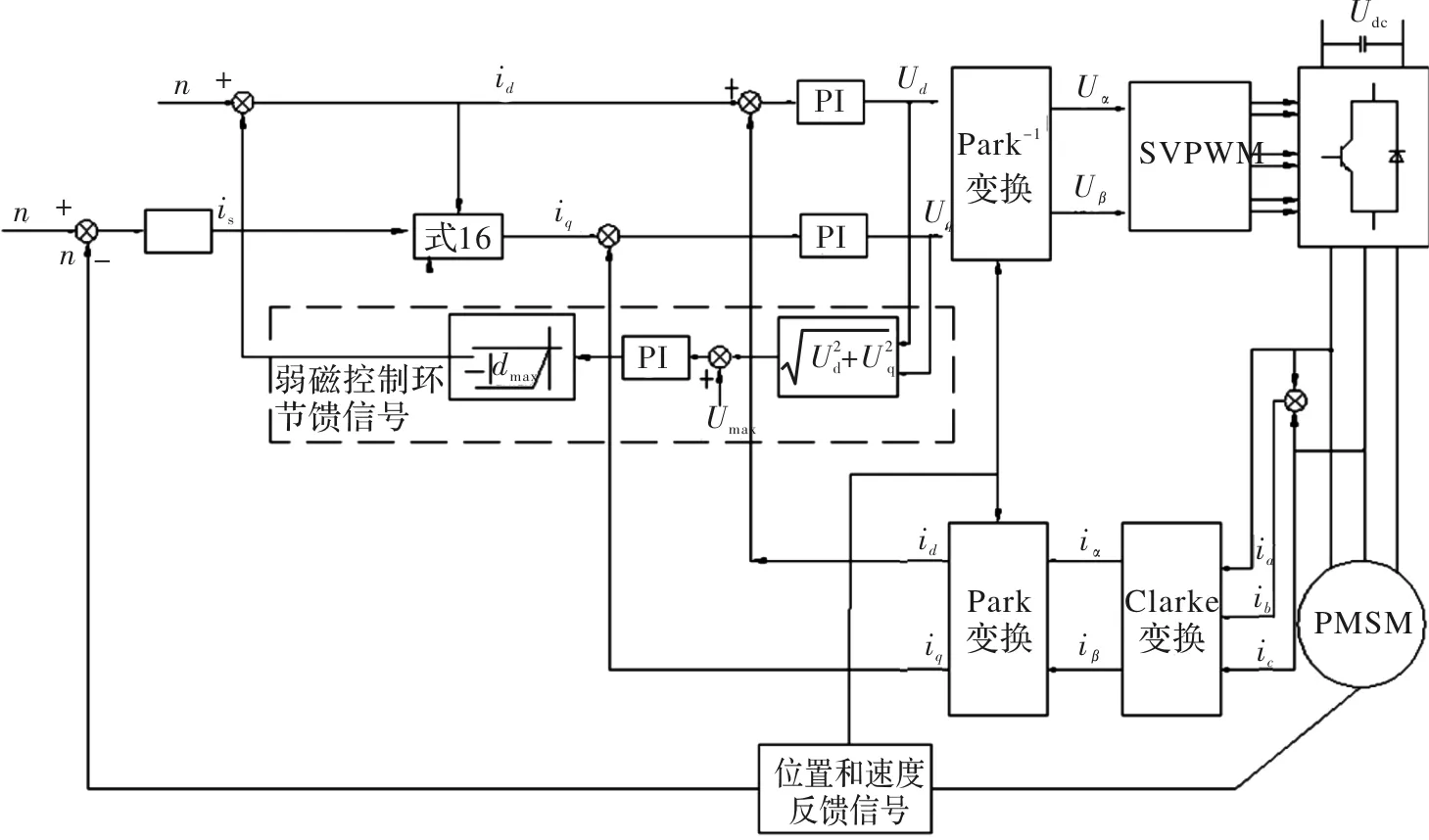
图5 永磁同步电机电压外环弱磁控制
2.4 小 结
总结上述3种矢量控制方法的特点:id=0控制计算量小,容易实现;MTPA最大转矩电流比控制能够实现单位电流下输出转矩最大;弱磁控制可以实现电机的高速运行。此外,对于隐极永磁同步电机,由于Ld=Lq,所以电磁转矩与id无关,因此,隐极永磁同步电机的id=0控制就是MTPA最大转矩电流比控制。
因此,id=0控制适用于隐极式永磁同步电机的恒转矩控制;MTPA最大转矩电流比控制适用于凸极式永磁同步电机的恒转矩控制;弱磁控制适用于高于额定转速时的恒功率控制。
3 三种电流控制策略仿真
使用Matlab/Simulink进行三种控制策略的仿真,分析控制效果。Simulink中搭建的PMSM矢量控制如图6所示,仿真参数如表1所示。
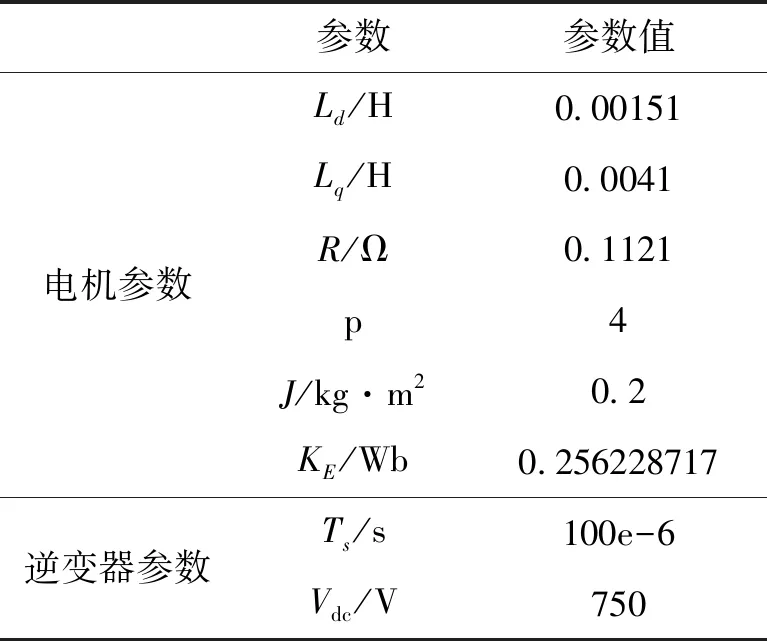
表1 仿真参数
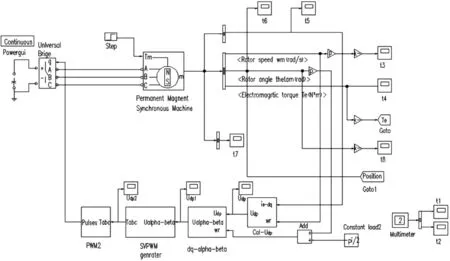
图6 Simulink中PMSM矢量控制仿真
3.1 id=0控制仿真
在电流环中,将id给定值设为0,转速调节器的输出作为iq给定值,实现id=0控制。在0 s,控制电机从0空载加速至500 r/min;2.5 s时刻,给电机施加200 Nm负载,得到的仿真波形如图7所示。




图7 id=0控制的仿真波形
3.2 MTPA最大转矩电流比控制
在仿真中,将转速环的输出作为定子电流is的给定值,利用式(11)计算出定子电流矢量与d轴电流的夹角,进一步算出id,iq给定值,实现MTPA控制。在0 s,控制电机从0空载加速至500 r/min;2.5 s时刻,给电机施加200 Nm负载。得到的仿真波形如图8所示。
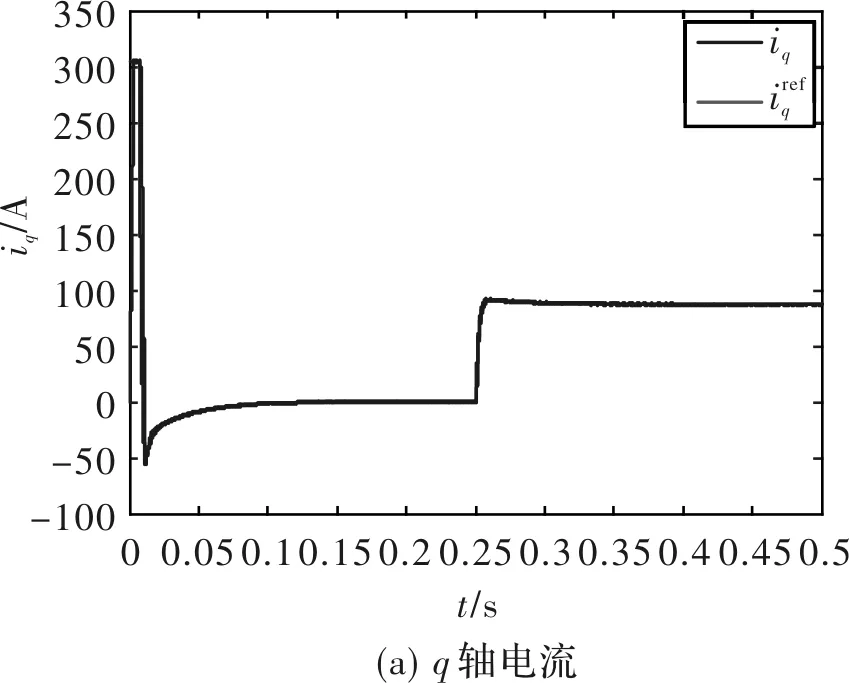


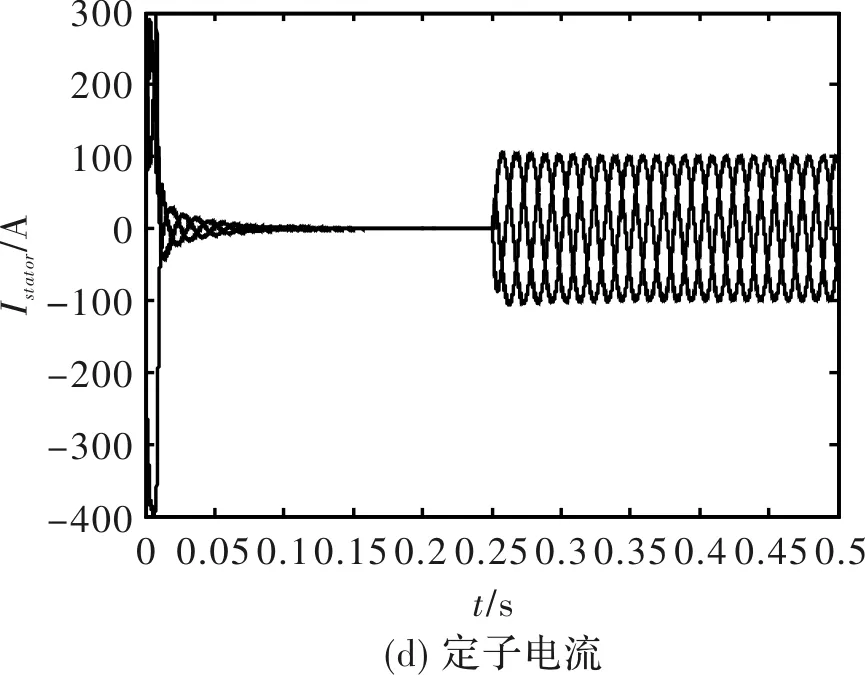

图8 MTPA控制的仿真波形
3.3 弱磁控制仿真
采用图4所示的超前角弱磁控制方法,在0时刻,启动电机从0加速至500 r/min,2.5 s时刻,给定速度指令为2000 r/min。得到的仿真波形如图9所示。

图9 超前角弱磁控制仿真波形
图10为相同仿真工况下,id=0控制策略的转速波形。对比两者可以发现,在id=0控制时,转速加至2000 r/min时,导致系统失稳,而弱磁控制可以使电机加速至2000 r/min。
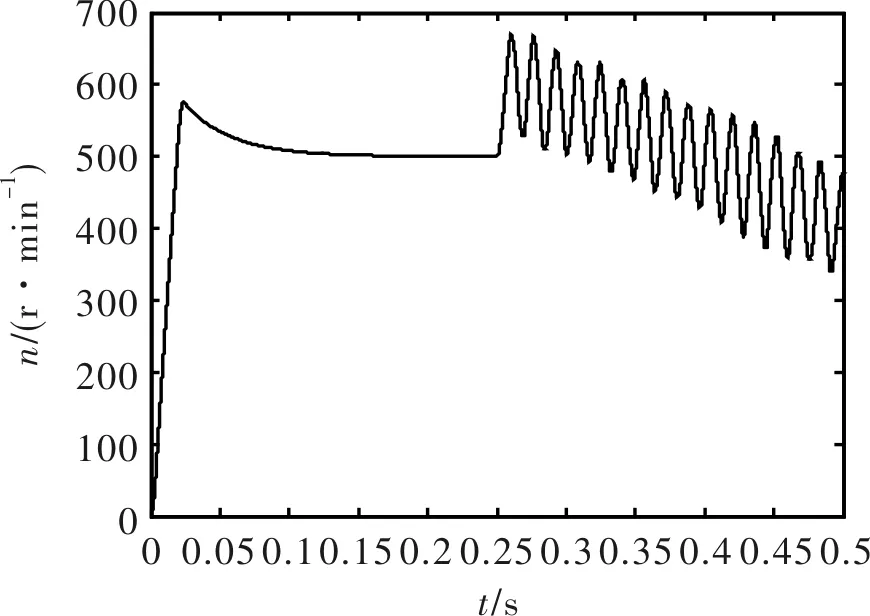
图10 id=0控制转速指令加至2000 r/min时转速波形
3.4 id=0控制和MTPA控制的对比
图11(a)和图11(b)分别为图8(d)和图7(d)的定子电流波形的局部放大图。可以看出,在稳态时输出转矩均为200 Nm的情况下,MTPA控制的定子电流峰值为105 A,而id=0控制的定子电流峰值达到了140 A,可见MTPA实现了单位定子电流的情况下输出更大的转矩。此外,从图7(c)和图8(c)的电磁转矩波形可以看出,在电机加速过程中,MTPA提供的加速转矩更大。

图11 MTPA控制和id=0控制定子电流峰值
3.5 小 结
通常情况下,矢量控制采用id=0的控制策略,即控制d轴电流为零,这样电机的输出转矩与q轴电流成正比。由于内埋式永磁同步电机的凸极特性,dq轴电流乘积项也会产生转矩,在这种情况下,在同样的定子电流情况下,id=0的控制策略输出的转矩并不是最大的,此时采用最大转矩电流比(MTPA)控制,可以实现电机的最大转矩输出。
试制了一台126 kV电机驱动断路器的样机,采用最大转矩电流比(MTPA)控制并进行了分合闸实验。实验样机如图12所示。

图12 126 kV电机驱动断路器
图13分别为断路器的合闸实验位置波形和分闸实验位置波形。各自在同样的位置参考曲线下重复进行5次操作。从波形来看分合闸实验均能很好地实现曲线跟踪,并且断路器的动作特性非常稳定,一致性好。
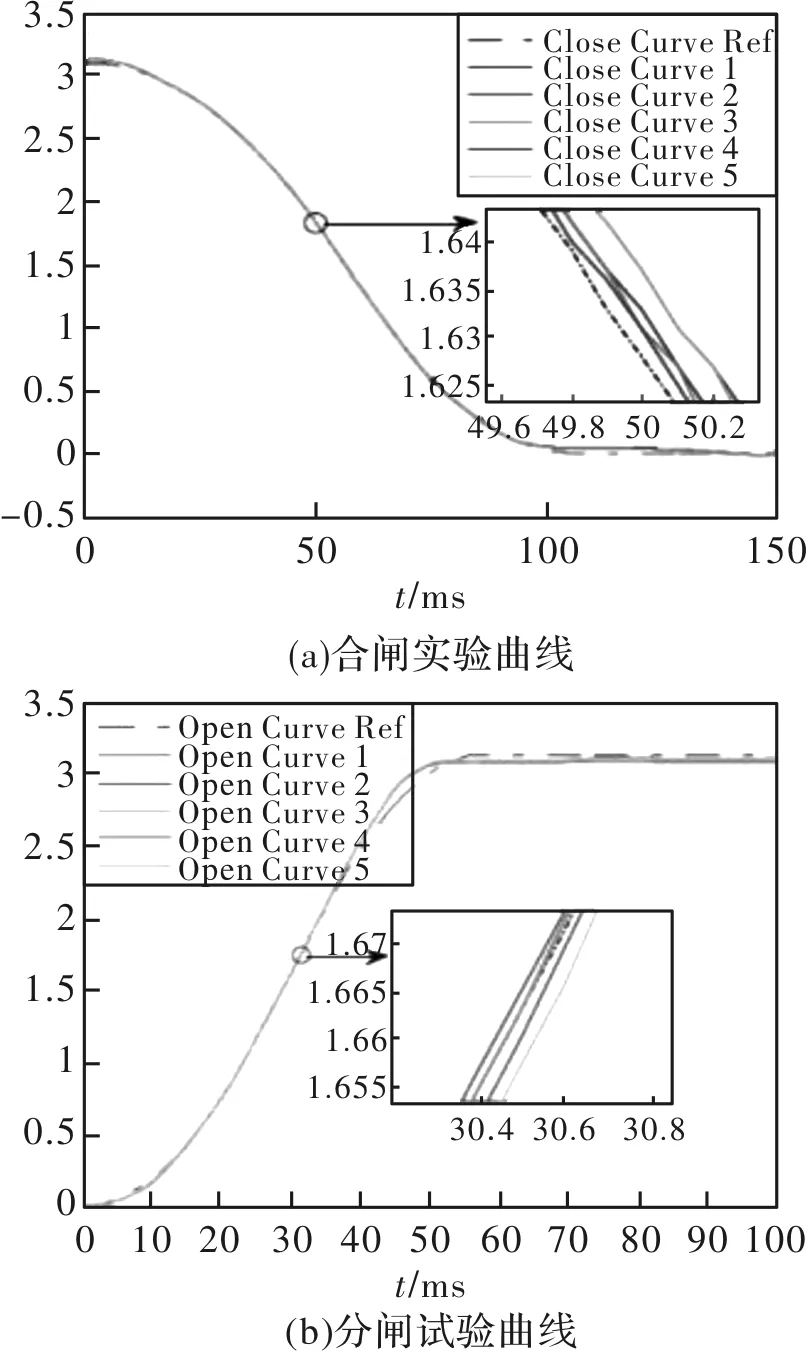
图13 合闸和分闸试验波形
4 结 语
本文描述了永磁同步电机的数学模型,在数学模型的基础上,分析了永磁同步电机矢量控制的三种电流控制策略:id=0控制,MTPA最大转矩电流比控制和弱磁控制。描述了三种控制策略的控制原理和特点,通过仿真对三种控制策略进行了验证。
(1)id=0控制计算量小,容易实现,适用于隐极式永磁同步电机的恒转矩控制。
(2)MTPA最大转矩电流比控制能够实现单位电流下输出转矩最大,适用于凸极式永磁同步电机的恒转矩控制。
(3)弱磁控制适用于电机高于额定转速时的恒功率控制。
(4)对于隐极永磁同步电机,由于Ld=Lq,所以电磁转矩与id无关,因此,隐极永磁同步电机的id=0控制就是MTPA最大转矩电流比控制。
(5)采用MTPA最大转矩电流比控制可以实现伺服电机作为操动机构在高压断路器领域的应用,且动作特性稳定,一致性好。
