实景三维模型在峡谷地形中的建立
2019-04-23李伟哲
李伟哲
(陕西省水利电力勘测设计研究院,陕西 西安 710000)
1 概况
东庄水利枢纽工程是陕西省目前建设的设计库容最大、大坝最高的水利枢纽工程。枢纽区位于渭北高原的大峡谷地区,最大高差约600 m,河谷两岸岩壁陡峭,多处呈倒坡状态,吊桥处峡谷深度170 m,底部河道最窄处仅15 m,吊桥位置处峡宽度175 m,坝址区域谷坡陡峻、谷底无法通行。
因为地形所致,传统数字线画图(DLG)所含有的信息较为局限,与实际情况存在一定差异,无法为勘测设计人员提供可识别的地理位置信息。而如果建立较高分辨率的实景三维模型,可以较为真实且完整地展示现场枢纽区的地形地貌现状,为勘察设计人员提供有效助力。

图1 航摄范围示意图
航摄工作任务范围见图1 中红线内区域,周边区域相对高差达到500 m,任务区域总面积约为1.2 km2。测区范围内有布设的平面和高程控制点,作为像控点测量的起始点。
2 航摄方案
2.1 航拍无人机
因周边区域高差较大,体积较大的固定翼无人机无法采集到满足精度原始影像,为满足精度要求和飞行安全的要求下,决定采用大疆精灵4Pro 无人机进行航摄,其自带航拍器(型号:DJI FC6310),焦距为 8.8 mm,使用 GPS/GLONASS 双模定位并记录影像位置信息。
2.2 像控点布设
枢纽区峡谷底交通困难、难以到达,谷底无法布设像控点,因此,像控点布设在峡谷边沿(吊桥)以上可抵达区域;同时由于峡谷两岸山体陡峭、植被茂密,布设了15 个像控点,该间距足以满足地形图绘图要求,见图2。
像控点选在旁向重叠的中线附近,离开方位线的距离大于像幅宽的20%,距像片边缘大于50 个像素[1]。
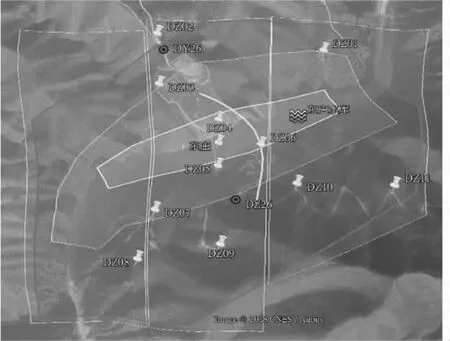
图2 分层航摄范围及像控点布设图
2.3 航线规划
航向重叠率大于75%、旁向重叠率大于65%。航向覆盖超出摄区边界线2 条基线,旁向覆盖超出摄区边界线大像幅的50%。
无人机倾斜摄影的飞行高度是航线设计的基础,相对行高确定的原则是需要根据任务要求选择合适的地面分辨率[2],然后结合倾斜相机的性能参数,按照计算公式:
式中:H 为航摄高度,分别取 30 m、150 m、300 m;f 为镜头焦距,大疆精灵4Pro 的镜头焦距为8.8 mm;GSD 为地面采样间隔(地面分辨率),m;ɑ 为像元尺寸,大疆精灵4 Pro 的像元大小为2.4123 μm。
依此计算可以得到不同航高对应的最低点的地面分辨率,依此决定分为三层航摄采集影像数据(见图3):
1)相对航高300 m 航摄时,航摄影像主要用于连接全局的像控点,采用软件规划航线的方式由无人机自动航摄。航摄区域如图2 红线范围所示,相对河道底部的最大航高470 m,高处山脊的地面分辨率约为5 cm,河道底部的地面分辨率约为13 cm。
2)为了提高航摄范围纵向中部的影像质量,缩小航摄范围,同时降低飞行高度[3],设定相对航高为150 m,航摄范围如图2 浅蓝色所示,高处区域的地面分辨率约为4 cm,峡谷底部的最大航高320 m,河道底部的地面分辨率约为9 cm;为了避免两岸山体对传感器安全的影响,全程采用手动模式航摄。
3)为了满足谷底航摄地面分辨率达到5 cm 左右、同时保证峡谷底部两岸侧壁及谷底的航摄影像纹清晰,保证航摄传感器安全,避免撞击岩壁、吊桥等地物,经反复计算优化后,设定相对航高30 m,所示范围如图2 绿色区域;相对于谷底的最大航高200 m,该航摄高度航摄采用纯手动超低空飞行,紧贴峡谷两侧岩壁,使得采集峡谷底部的地面分辨率优于5.5 cm。

图3 航摄高度剖面示意图
完成航拍影像的采集也需要对原始影像数据进行检查,确保影像清晰,层次丰富,反差适中,色调柔和;能辨认出与地面分辨率相适应的细小地物影像。
3 航摄内业数据处理
3.1 空三解算
空三解算软件使用Bentley 公司的ContextCapture 软件的AT 模块,采用光束法局域网平差法进行空三计算。
Bentley ContextCapture 软件 AT 模块经过 Extracting Keypoints(提取特征点)、Selecting Pairs(提取同名像对)、Initializati on Orientation(相对定向)、Matching Points(匹配连接点)、Bundle Adjustment(区域网平差)等步骤的运算处理,得到摄区空中三角测量成果。
多层影像与单层影像标记像控点的方式相同,但是空三解算处理的连接点视图结果经常扭曲甚至失败,多次尝试增删或修改像控点刺点片也无法完成空三解算[4]。利用ContextCapture软件的“手动连接点”的功能,在具有不同分辨率的影像之间,适当添加手动连接点,以此加强不同分辨率影像之间的连接匹配,进行强制匹配,减少软件内自带算法的匹配失败率,通过采用增加人工干预的方式解决空三解算自动匹配失败的问题,从而完成多层影像数据融合。
为了提高空中三角测量的成果精度,可以使用软件对摄区进行二次空三运算,最终得到更精确的摄区空三结果。
3.2 实景三维模型制作
建模处理工作站采用并行GPU 框架硬件,专用硬盘存储可保证快速数据读取及高效计算。另外,并行处理能力极大提高了计算机速度,减少了运行时间。三维模型的生产使用ContextCapture 软件处理的空三成果作为数据源。模型制作的计算任务量较大,为了提高数据处理的速度,处理过程中将测区分为多个处理单元,采用集群式运算方式处理数据[5]。
Bentley ContextCapture 软件根据航摄获取的原始影像数据制作实景三维模型成果,真实地还原了地物的空间位置、形态和纹理。
输出最终的可视化三维模型产品格式有:3MX、OSGB、STL、i3s 等,如图4。其它附属产品有:正摄影像图、点云等。

图4 实景三维模型截图
4 三维模型精度检测
在航摄区域内GNSS-RTK 及全站仪外业采集73 个碎部点作为检查点,在三维模型产品完成后,根据检查点相应的位置,在三维模型产品上采集对应位置的点高程,计算高程较差进行精度统计,见表1。
利用实测点与三维模型采集的检查点高程较差按同精度检测的计算公式计算出高程注记点中误差m注,见表2。
通过以上数据分析可以看出:
(1)采用1 m 等高距时,高程注记点较差的粗差率为16%,超过限差规定的5%。

表1 三维模型的检查点精度统计表 单位:m

表2 高程注记点精度统计
(2)采用2 m 等高距时,高程注记点较差的粗差率为1%,高程注记点中误差m注为0.33 m,符合要求。
因此,根据检测三维模型的高程精度检查结果,其可以达到基本等高距为2 m 的1∶1000 比例尺地形图的精度。
5 结论
在大高差的峡谷地形区域内无法通过航线规划确保设备安全的情况下,可以通过手动飞行来完成较小面积的航摄任务,需要拥有一定的无人机的操控熟练度。
因航摄高度直接影响了采集数据的地面分辨率,故在起飞点规定的相对高度航摄的影像数据保证了较高处的数据精度,却无法满足较低处(如河道底部)的数据精度要求。所以无人机需要根据实际地面分辨率,采用分层航摄方式在不同的高度采集影像数据,随着航摄高度的降低覆盖区域也需要缩小,保证航飞安全的前提下使不同高度航摄该高度重点区域的影像数据,确保不同地形的模型皆满足精度。
实景三维建模技术已经逐渐被行业熟知,它包含非常丰富的地理信息,与其他专业相结合,就可以实现可视化水利工程的三维设计,形成完整的、精确到构件的地理信息数据库,提供支撑项目各阶段、各部分所需的准确数据信息,有效提升设计施工管理工作的效率。
