基于双STM32的海洋浮标采集控制系统
2019-04-19杨海庆
杨海庆
(中船重工集团第七一○研究所,宜昌 443000)
海洋浮标是一种无人值守的实时海洋水文气象自动观测设备,可长期、连续、定点、自动检测海洋水文气象要素,为灾害性海洋环境预报、海洋开发、海洋工程提供实时资料,是海洋灾害预警预报系统中资料的主要来源和重要组成部分。
随着我国“数字海洋”建设不断深入推进,海洋观测已进入到对海洋动力、大气、环境、突发事件等实行全天候立体观测阶段,海洋浮标从单一的气象浮标或水文浮标,发展到综合多参数浮标,浮标的复杂化带来了监测传感器的专业化和多样化,浮标观测数据已从传统的风、温、湿、压观测扩展到波浪、盐、流、水质等,传感器数量类型繁多,接口包括模拟、脉冲、数字,特别是数字传感器越来越多的使用,使得对串口通信接口的需求增加。基于浮标的发展,并应某公司要求,设计开发一种采用双STM32组成主从控制核心,能够扩展到10个串口接口,搭配RS232、RS485、RS422接口电路,能够匹配多种不同数字接口的传感器,适应更多用途的海洋浮标。
1 采集控制系统概述
海洋浮标采集控制系统由电源系统、搭载的传感器、控制中心、北斗终端组成。电源系统一般为蓄电池与太阳能电池组成双电源供电。搭载的传感器有风向风速传感器、水温传感器、气温传感器、气压传感器、方位传感器、GPS等传统传感器,还能够搭载如波浪传感器、海流传感器、生态传感器等数字接口的传感器。控制中心采用双STM32单片机作为控制核心和核心扩展,主、从机之间采用串口通信;连接北斗终端用以实时传输采集到的各种数据。其组成框图见图1所示。
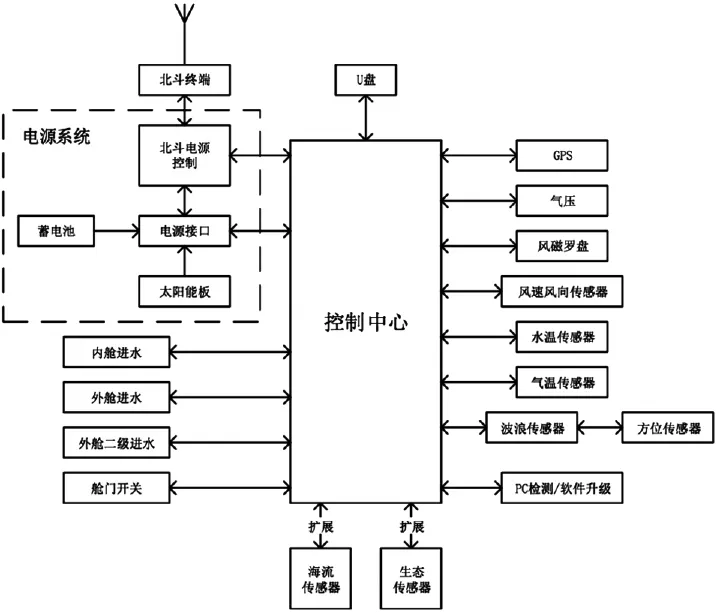
图1 采集控制系统组成框图
2 系统功能实现与电路设计
2.1 供电系统功能
浮标的电源来至太阳能电池板和蓄电池组,本系统采用的太阳能电池板的功率为60W×4,每块太阳能板电压16V~18V,4块太阳能板并联使用(B1~B4);蓄电池组为12V 100Ah×4,4个蓄电池并联使用(B5~B8)。阴雨天时,太阳板电压低于蓄电池电压,蓄电池供电系统工作;当阳光充足时,太阳能电池可以提供较高电压和充足电流,一方面给蓄电池组充电,同时为浮标系统正常工作提供电源为确保北斗终端在蓄电池电压较低时能正常工作,北斗电源从太阳能电池板与蓄电池电源接口处就近引出,降低电缆上压降。由于北斗终端是定时上电工作,控制中心输出控制信号控制继电器常开点闭合,为北斗终端提供电源。电源系统电路见图2。
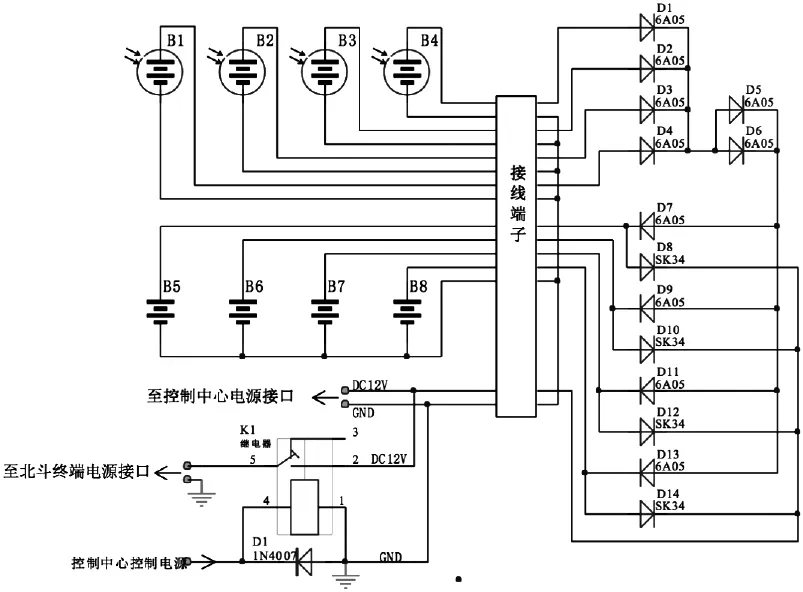
图2 电源系统电路
2.2 多参数采集传感器
依据功能分析,多参数数据采集任务由风速风向、气压、方位、波浪、海流(扩展)、生态(扩展)、GPS传感器以及自制水温、气温、报警传感器完成。通过比较各传感器的性能以及行业内广泛使用,选择如表1所示传感器并列出相关技术参数。
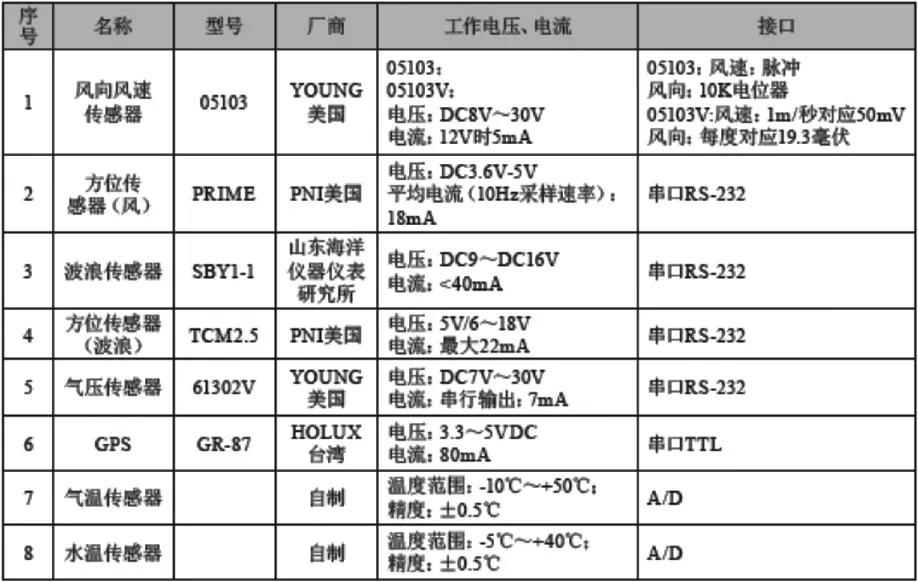
表1 传感器配置表
2.3 控制中心功能
控制中心通过模拟或数字接口与传感器相连,采集水文、气象要素,存储采集的数据。数据采集计算方法遵守以下两个标准要求:GB/T 14914-2006《海滨观测规范》;HY/T 059-2002《海洋站自动化观测通用技术要求》。
2.3.1 风速风向数据采集
根据搭载的传感器,风速信号为正弦波,测算频率f,风速值 =0.098/f(m/s);
风向采集后须校正到真实方向。安装时风向磁罗盘指北线与风传感器的零度方向与浮标上的基线对齐。校正方法为:真实风向=风方位传感器测量值+风向测量值,大于360时,减去360。
(1)瞬时风速和相应风向
瞬时风速:1s 采样一次(自整时开始,含整时),3s内的算数平均值为瞬时风速;
瞬时风向:3s采样一次的值为瞬时风速对应的风向;
(2)基本风速和相应风向(1min)
基本风速:1min内的瞬时风速的平均值,1min 21个样,下一分钟取上一分钟的最后一个值,经误差处理后,计算瞬时风速的平均值为基本风速;
基本风向:1min内瞬时风向的矢量平均,1min 21个样,下一分钟取上一分钟的最后一个值,通过单位矢量合成作为1min的平均风向。
(3)平均风速和相应风向(10min)
平均风速:每10min一次的十分钟平均风速(自整时00min开始),计算1min风程的平均值,并以1min为步长,滑动计算十分钟平均风速,作为该十分钟结束时刻的十分钟平均风速。例21,21,…….30分钟的1min风速平均值作为第30分钟平均风速。
平均风向:10min平均风向,对10分钟内的10个1min风向值进行单位矢量合成。
(4)最大风速和相应风向
最大风速:挑取每相邻两个定时(30min或60min)之间10min平均风速滑动的最大值及出现时间,前一次定时的10min平均风速(前一次第20min~第29min的平均风速)参与该极值的挑选。
最大风向:最大风速时刻对应的风向。
(5)极大风速和相应风向
极大风速:每相邻两个定时(30min或60min)之间瞬时风速的最大值及出现时间,前一次定时的瞬时风速参与该极值的挑选。
极大风向:极大风速时刻对应的风向。
2.3.2 气温、水温数据采集
连续采样气温、水温数据,每3s采样一次,连续采样1min,1min 21个样,下一分钟取上一分钟的最后一个值,经误差处理后,计算样本数据的平均值,用整点前1min的平均值,作为该整点的观测值。
相邻两次定时之间的气温、水温最高值和最低值,前一次定时(或日界)的测量值参与该极值的挑选。记录出现最高值和最低值的时刻。
2.3.3 气压数据采集
为提高采样分辨率,气压传感器在安装前通过串口设定好上下限值,该设定也可通过采集控制系统远程设定。P=(上限-下限)×测量电压/输出电压范围+下限。
连续采样气压数据,每3s采样一次,连续采样1min,1min 21个样,下一分钟取上一分钟的最后一个值,经误差处理后,计算样本数据的平均值,用整点前1min的平均值,作为该整点的观测值。相邻两次定时之间的气压最高值和最低值,前一次定时(或日界)的气压值参与该极值的挑选。记录出现最高值和最低值的时间。
2.3.4 波浪数据采集
波浪传感器数据通过串口指令读取。其工作时序为:①在发送时刻前25分钟,加电;②延时10秒后,发启动工作命令;③延时23分钟后,发送索取波浪数据命令;④发送索取波向分布数据命令;⑤数据接收完毕,切断电源。
2.3.5 GPS数据采集
GPS数据通过串口指令读取。其工作时序为:
①在发送时刻前2分钟,加电预热;②整点读取$GPRMC串数据;③数据分离,取出经纬度坐标、有效标志、时钟;④数据有效,GPS断电,若无效,重复读取,直至获得有效数据;⑤若GPS数据无效,可通过北斗获得定位数据。
2.3.6 数据存储
数据存储采用2G U盘,存贮风速、风向、气温、气压、水温每分钟的采样平均值及整点或半点发送的全部数据。存储格式可采用ASCI I 文本格式。当U盘数据存储为ASCI I 码时,一小时数据估计为6600byte,则用2G U盘存储时间:2G/6600/24/365=34年。因此,经过计算,SD中可直接存储ASCII码文本文件,这样U盘数据就不需要利用程序导出了,直接通过读卡器读出。
2.3.7 电路设计
控制中心采用双STM32单片机作为控制核心和核心扩展,主、从机之间采用串口通信。STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cor tex-M3内核。增强型STM32 F10 3系列时钟频率达到72MHz,是同类产品中性能最高的产品。内置256K的闪存;时钟频率72MHz时,最大功耗70mA,是32位市场上功耗最低的产品。芯片具备80路I/O通道,可灵活配置成16路12bit A/D采集通道,5路RS232接口,2路I2C接口、SPI接口、USB接口。根据浮标功能,控制中心采集传感器数据分两种,一种是每3s采集一次的传感器数据,这部分传感器是风速风向、方位、气压、气温、水温;另一种是定时采集的传感器数据,包括GPS、波浪、海流、生态。主CPU设计的主要功能为:①通过串口电路,实现与搭载的串口接口的传感器通信,定时采集传感器数据;实现与北斗终端串口通信,将处理的数据按要求定时发送;实现与U盘串口通信,存储需要的数据;②通过A/D接口电路,采集系统自身的电源电压及传感器电源电压,以检测系统工作状态;③通过I/O接口电路,实现控制一部分传感器定时上电、关电工作。从CPU设计的主要功能为:①通过串口电路,实现与搭载的串口接口的传感器通信,每3s采集一部分传感器数据和定时采集一部分传感器数据;②通过A/D接口电路,实现每3s采集A/D接口的传感器数据;③通过I/O接口电路,实现采集I/O接口报警传感器状态。
主CPU与从CPU通过主从应答、映射串口进行数据传输,主CPU每3s给从CPU发送同步脉冲,从CPU接受到脉冲后开始采集搭载的传感器数据,处理数据,传输给主CPU;主CPU也按3s的同步脉冲时间接收从CPU传来的数据,再经过处理,与自己采集、处理的传感器数据一同打包,定时通过北斗终端传输数据后,再存储至U盘。控制中心原理框图如图3所示。

图3 控制中心原理框图
2.4 北斗传输
北斗终端选用的是北京星地恒通信息科技有限公司自主研发的北斗一号船载型用户机(XDP200YX/G),该用户机具有北斗定位、短信息通信和GPS定位功能。主要特性:①北斗终端上电可控,可降低系统功耗;②正常状态下,北斗终端待机功耗≤4.5W;③瞬间发射功耗≤35W;④发送间隔≥60s;⑤通信申请指令长度≤77Byte,数据内容长度≤64Byte;⑥可发送指令获取当前北斗时间信息;⑦可发送指令获取当前北斗定位信息;⑧工作电压:9~30V。
3 结束语
本文阐述一种基于双STM32的海洋浮标采集控制系统,介绍了各组成部分的功能及路设计,对系统在实际应用中数据采集的方法进行分析及计算。在保证实现客户要求的基础上,本系统在设计中充分考虑到性价比和扩展性等,具有成本不高、扩展性比较强、设计开发便利等特点。
