基于机器学习的柔性触觉传感器设计*
2019-04-10郝志良王彩萍王晓杰
郝志良,马 刚,董 帅,王彩萍,王晓杰,*
(1.重庆邮电大学汽车电子与嵌入式系统工程研究中心,重庆 400065; 2.中国科学院合肥物质科学研究院先进制造技术研究所,江苏 常州 213164)
柔性传感器是一种用于感知表面作用力分布的柔性器件,因其优良的柔软性与伸展性,适用于贴附各种不规则表面,在机器人皮肤、可穿戴设备、医疗检测等领域有广泛的应用前景[1-3]。随着机器人技术的不断发展,应用于机器人皮肤的柔性触觉传感器引起了人们的广泛关注,其中阵列式柔性触觉传感器应用最为广泛[4-5]。Chang等人[6]采用丝网印刷技术将有机电阻印制在聚酰亚胺衬底上,成功研发了一种用于多点触摸检测的柔性传感器。由于设计了具有凸起结构的顶膜,该传感器具有较大的挠度和快速灵敏的响应特性。Tee等人[7]利用压敏薄片和印刷环形振荡器制备一种可以将压力直接转化为数字信号的机械感受器,这种感受器可以集成在大面积柔性基体上,其灵敏程度与人类皮肤可以相媲美。为了使柔性触觉传感器表现出良好的柔韧性和延展性,研究者们通常需要将传感器单元集成后嵌入到柔性基体中,这种结构设计对电路的集成设计及传感器的制作工艺带来很大挑战,并且大型阵列式柔性触觉传感器内部的导线的分布不仅会造成电磁噪音,也会降低传感器的柔性和可伸展性,限制了阵列式柔性触觉传感器的功能和使用范围。
近年来,也有很多研究者尝试使用新型柔性纳米材料来代替传统金属和半导体敏感器件。碳纳米管是一种一维纳米材料,由于碳原子之间采用sp2轨道杂化,电学性质稳定,即使在弯曲和拉伸状态下,碳纳米管也能保持其原本的电学性质,特别适合用于柔性电子器件中,因此,基于碳纳米管的柔性电子器件成为柔性传感器一个重要发展方向[8]。Dinh等人[9]以可回收的打印纸作为基底,以轻质柔软并具有较高强度的碳纳米管纱线作为敏感器件,设计了一种非侵入式热流量传感器,能舒适地贴附于人体皮肤并实时监测人体呼吸,可用于临床医疗和个人保健。Guo等人[10]基于具有宏观网格和微观蛛网网格结构的碳纳米管网格,设计了一种可拉伸可压缩的应变传感器:拉伸传感器用于弱刺激(脉冲刺激)和大运动检测,压缩传感器用于检测步行或跑步运动引起的大应变。Nela等人[11]在聚酰亚胺衬底上制备一个16×16的碳纳米管薄膜晶体管矩形网络,设计了一种高度灵活且可拉伸的柔性压力传感器,在平面或曲面均能够高精度地感知复杂对象。目前,众多学者主要研究将柔性纳米材料应用于传感器阵列,针对大面积柔性纳米材料传感器的相关研究较少。
本文在课题组前期对基于电阻抗成像算法的柔性传感器的研究基础上[12],以碳纳米管为敏感材料,以聚氨酯为基底制备了大面积的柔性导电材料,研制了一套可以采集任意边界电极之间的阻抗信号的硬件设备,并设计一种检测触觉位置的机器学习算法,最终实现柔性传感器的触觉位置检测功能。
1 样品制备与性能分析
1.1 样品制备
制备碳纳米管/聚氨酯电复合材料所需的原料包括:多壁碳纳米管(北京德科岛金科技有限公司提供,长度10 nm~20 nm,管径>50 nm,纯度>98%)、聚氨酯泡沫、二甲基硅油(美国道康宁公司提供,型号500cc)、正己烷(江苏强盛功能化学股份有限公司)、聚二甲基硅氧烷(PDMS,道康宁Sylgard 184)等。样品具体制备流程如图1所示。
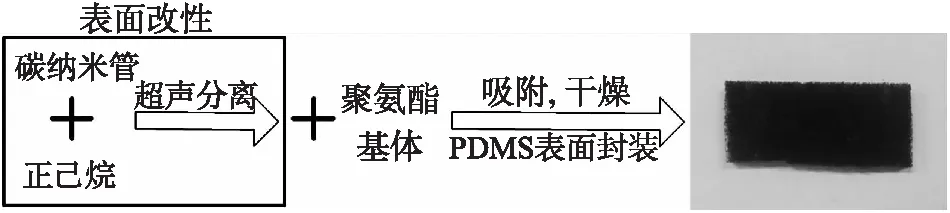
图1 样品制备流程
在样品制备时,首先根据理论计算不同质量分数碳纳米管/聚氨酯导电复合材料中需要多壁碳纳米管的质量,采用高精度电子称称取,并倒入烧杯中。将多壁碳纳米管与正己烷混合,并超声分散1 h,使多壁碳纳米管均匀分散于正己烷溶液中。然后将聚氨酯泡沫置于多壁碳纳米管/正己烷混合液中,充分搅拌,使聚氨酯基体完全吸附多壁碳纳米管。接下来将混合材料放入鼓风干燥箱中进行干燥,在50 ℃条件下,干燥3 h。最后在聚氨酯基体外层用软刷涂一层聚二甲基硅氧烷作为保护膜,以增加材料稳定性和提高传感器使用寿命。
1.2 性能测试
碳纳米管在聚氨酯基体中的质量分数,对柔性材料的导电特性、压阻特性、机械性能有很大的影响,也是决定能否作为传感器本体的关键性因素。在样品制备过程中发现,当碳纳米管的质量分数配比超过50%时,碳纳米管并不能完全有效填充入聚氨酯基体,因此本实验主要研究质量分数为20%,30,%,40%,50%的碳纳米管/聚氨酯样品的压阻特性。采用如图2所示的压阻特性测试装置进行电阻变化-应变测试。
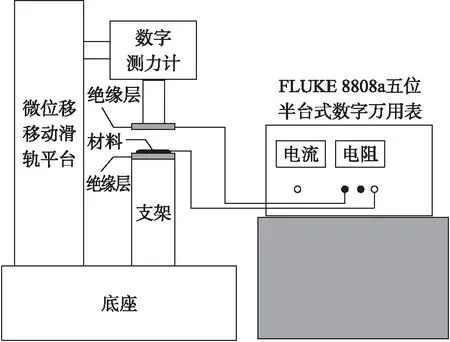
图2 压阻特性测量装置
测试过程中,将碳纳米管/聚氨酯导电复合材料放在支架上(测试过程按质量百分比从小到大的顺序),缓慢移动微位移移动滑轨平台使其缓慢下降,当将要接触材料表面时,短暂停顿,观看数字测力计的读数是否为零,若否则进行清零,反之继续移动微位移移动滑轨平台对碳纳米管/聚氨酯导电复合材料施加正压力,分别记录柔性材料发生不同程度的形变时测试仪的显示电阻值,材料形变范围为0%~90%。
制备不同质量分数的碳纳米管/聚氨酯导电复合材料样品,样品长度为6.0 cm,宽度为2.8 cm,厚度为0.5 cm。每种质量分数的碳纳米管/聚氨酯导电复合材料分批次制备五组,分别进行测试,并对测试结果作均值处理。根据测试结果,绘制了的电阻变化率-应变曲线,如图3所示。
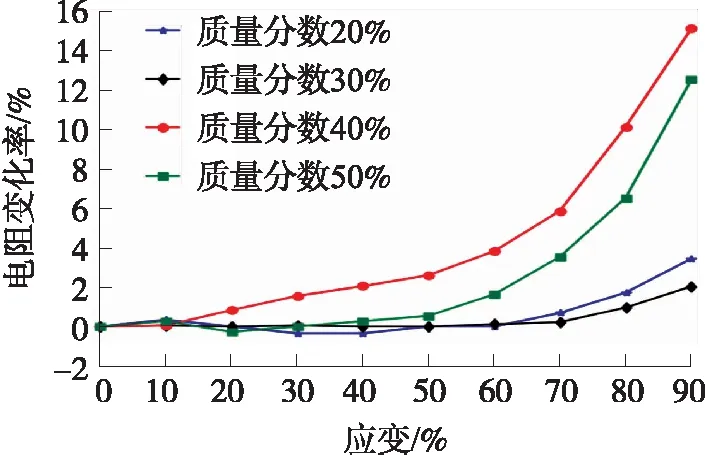
图3 电阻变化率-应变曲线
结果表明:碳纳米管/聚氨酯导电复合材料的阻值相对变化随形变的增大而增大,在应变达到80%时,阻值相对变化明显。并且质量分数40%的碳纳米管/聚氨酯导电复合材料阻值相对变化最大,敏感性较好,因此本文选择质量分为40%的碳纳米管/聚氨酯导电复合材料作为柔性触觉传感器本体。
2 柔性触觉传感器设计
本文提出的柔性触觉传感器结构如图4所示,主要包括数据采集系统和位置检测两部分。其中,位置检测采用机器学习分类算法,先用采集的数据集进行分类训练得到训练模型,然后利用该模型和当前采集的数据预测出压力位置信息。
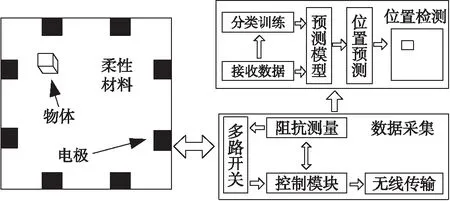
图4 柔性触觉传感器模型
2.1 基于机器学习的位置检测原理
机器学习位置检测包括样本采集和模型训练两个部分,将位置检测任务简化成多分类问题,在位置检测区域划分网格并设定序号生成位置标签,通过在样本集上训练得到的分类模型来预测当前采集数据对应的位置标签,实现位置检测。
样本采集时,需要先确定压力位置和数据特征,然后在每个位置进行采样得到数据集。本文采用8个电极对柔性材料进行阻抗测量,当固定压力位置后,采集每两个电极之间的阻抗数据,一共可以得到28个独立数据,将其作为模型的特征,28个阻抗测量方式如图5(a)所示。实验中将柔性材料均等划分成16个网格,如图5(b)所示,在每个网格中放置物体后,依次采集28个阻抗数据,生成一个样本。遍历所有网格进行数据采集,每个网格采集500次,得到8 000个带标签的样本组成的数据集。
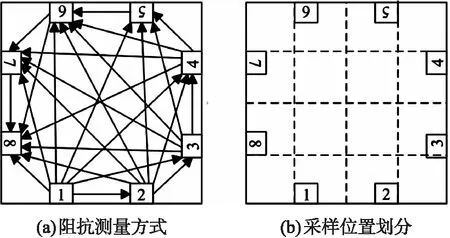
图5 阻抗测量方式与网格划分
完成数据采集后,需要选择机器学习分类算法进行模型训练。常用的机器学习分类算法有K近邻算法(KNN)、支持向量机(SVM)、决策树(DT)、朴素贝叶斯(NB)、随机森林(RF)等。与其他分类算法相比,SVM算法在分类问题上有一定优势,SVM分类器仅由支持向量决定,与训练集样本数量无关,系统结构简单,有较好的鲁棒性;SVM在求解最优超平面时通过拉格朗日优化方法转化成二次规划问题,得到全局最优解,能保证分类器具有较高的分类准确率;SVM是建立在统计学习理论的VC维理论和结构风险最小原理基础上的,根据有限的样本信息在模型的复杂性和学习能力之间寻求最佳折中,具有较好的推广能力[13]。为进一步验证各算法的训练效果,本文先将数据集按7∶3的比例划分成训练集和测试集,使用以上机器学习分类算法分别对模型进行训练,并在测试集验证以上算法训练的模型预测结果,分类准确率如图6所示。结果表明,SVM算法的分类准确率最高,因此本文选择SVM算法进行位置检测。
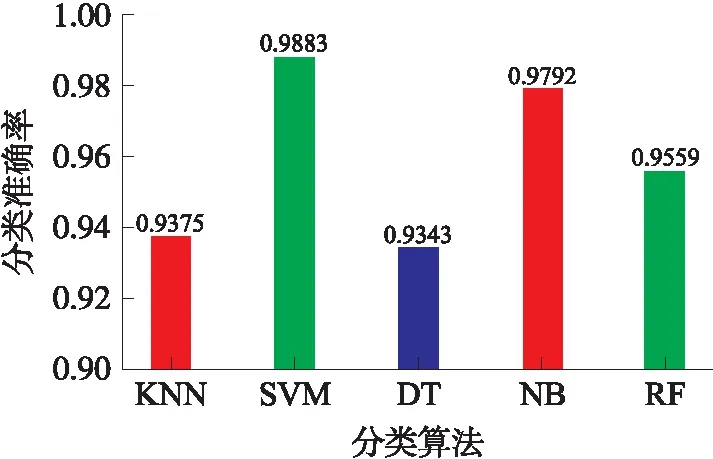
图6 分类算法准确率
2.2 柔性触觉传感器硬件设计
柔性触觉传感硬件采用模块化设计方法,主要包括阻抗测量模块、控制模块、多路开关模块、无线传输模块。其中,控制模块通过多路开关选通不同电极,并接收阻抗测量模块的数据,然后通过无线传输模块将数据发送到上位机。系统硬件结构框图如图4所示。
本文选用意法半导体公司高性能、低成本、低功耗的STM32F103作为控制器,其内部资源丰富,可有效提高开发效率。多路开关选用两片单端8通道多路模拟开关芯片CD4051,两片多路开关的8路通道同时连接柔性材料的8个电极,并分别通过3个控制端实现不同通道的选通,以实现不同电极之间的阻抗测量。阻抗测量模块选用高精度阻抗测量芯片AD5933,其片上集成频率发生器与12位模数转换器(ADC)。AD5933芯片的工作原理是用频率发生器产生的信号来激励外部阻抗,外部阻抗的响应信号由片上进行采样,然后有片上数字信号处理芯片(DSP)进行离散傅里叶变换(DFT)处理,并通过IIC通讯方式将测得的阻抗信息传输给控制模块。无线传输选用高性能的主从一体蓝牙串口模块HC-05,兼容5V或3.3V电压,空旷地有效通信距离10m,极大的拓展了柔性触觉传感器的使用范围。硬件实物如图7所示。
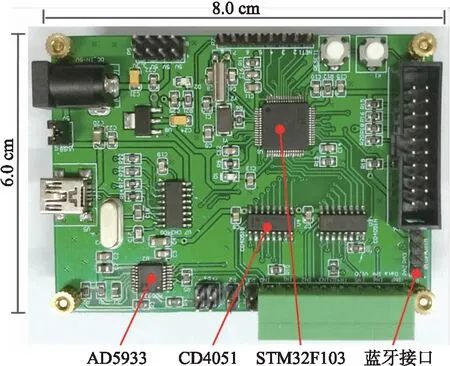
图7 硬件实物图
2.3 柔性触觉传感器软件设计
柔性触觉传感软件系统主要包括下位机的数据采集系统和上位机的位置检测系统。数据采集系统主要负责系统和阻抗测量模块的初始化,控制不同电极的选通并将测量数据通过无线模块发送到上位机,具体流程如图8所示。上位机主要是通过串口接收下位机发送的新数据,解析数据后,调用机器学习训练的模型,识别出物体位置,并在可视化界面显示。
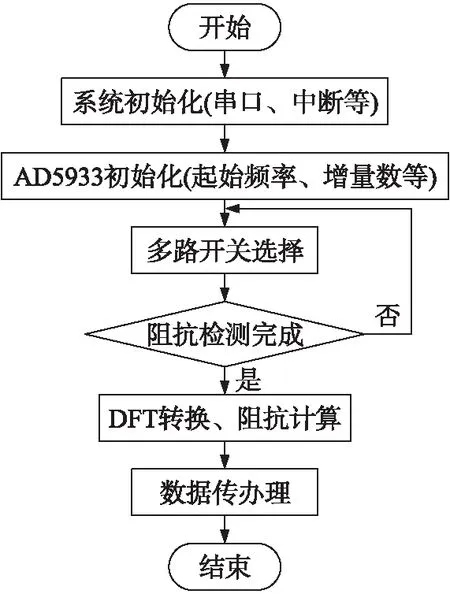
图8 上位机流程图

图9 柔性触觉传感器测试结果
3 实验测试
为了验证柔性触觉传感器的检测性能,本文制备了尺寸为10 cm×10 cm×0.5 cm、质量分数为40%的碳纳米管/聚氨酯柔性压敏材料,并将柔性材料均等划分成16个网格,每个网格边长2.5 cm,即该柔性传感器的空间分辨率为2.5 cm。按照2.1小节中所述方法生成数据集后,训练SVM分类模型。为了模拟压力加载过程,本文在底面半径1 cm,高4 cm的轻质圆柱体顶部放置500 g砝码,将其随机放置在柔性压敏材料表面划分的网格内,并对网格进行编号1~16,进行位置检测实验。本文在每个网格测试30次,共得到480个测试数据,将模型测试结果绘制成误差矩阵,如图9所示。
由误差矩阵可知,本文设计的基于碳纳米管/聚氨酯柔性触觉传感器可有效检测压力位置,准确率达到83.63%。虽然较传统阵列式传感器偏低,但是对于初期探索实验而言,83.63%的准确率可以接受。柔性触觉传感器产生检测误差的主要原因是柔性压敏材料的阻抗变化较小,导致边界电压变化小,另外,训练样本较少以及数据采集硬件电路精度不高也是误差产生的原因之一。
4 结论
①本文提出一种新型碳纳米管/聚氨酯导电复合材料,通过4种质量分数的碳纳米管/聚氨酯导电复合材料的压阻测试,质量分数为40%的碳纳米管/聚氨酯导电复合材料阻值相对变化较明显,敏感性较好。
②设计了柔性触觉传感器数据采集系统,并应用机器学习分类算法成功实现压力位置检测,空间分辨率达到2.5cm,准确率达到83.63%。同时,验证了本文采用质量分数40%的碳纳米管/聚氨酯导电复合材料作为柔性触觉传感器本体的可行性,为柔性触觉技术的进一步发展提供了新的方案与技术支持。
