基于LED车灯的车联网高速通信系统
2019-04-10蒋子豪刘渊帆梁尚雨王福民李广士
蒋子豪,刘渊帆,梁尚雨,王福民,李广士,乔 梁,迟 楠
(复旦大学通信科学与工程系电磁波信息科学教育部重点实验室,上海 200433)
引言
可见光通信(visible light communication, VLC)以发光二极管(lighting emitting diode,LED)作为发射光源,且能够以较低的价格实现照明和通信,适用于各种接入场景,其优点是绿色、节能且不受电磁干扰[1]。基于LED的可见光通信能同步地提供照明和通信,因而其发展相当有前途。VLC作为一种新的照明和通信模式,促进了下一代照明和接入网络的发展和技术进步,同时也成为国际研究新的热点[2,3]。VLC的出现和发展不仅拓宽了无线接入网络的频谱资源,而且为社会提供了一种新的移动接入方式[4-6]。
车联网是交通领域中物联网的具体应用,是智能交通的基础和前提。尽管车联网仍处于起步阶段而且汽车网络还不够成熟,但中国正不断加强对汽车网络的研究,这也导致人们从无到有地认知并了解车联网。
本文提出一种基于可见光通信而应用于车联网的通信方式,利用车灯LED作为发射端和高性能的PIN管作为接收端。该可见光通信系统基于离散多音频(Discrete Multi-Tone,DMT)调制方式。通过改变传输距离、驱动电流、信号幅值等参数,我们研究了该系统的最高传输速率与误码率性能。
1 车联网背景
车联网的概念是从物联网中扩展出来的,也可以说是物联网在交通领域的一种应用。从广义上讲,车联网并非传统意义上信息网络平台对所有车辆的动态静态信息与属性等的监控与提取,而是更为广泛地以车为中心的,搭建起车对车、车对地面、车对人和车对云端一体化的进行无线通讯与信息交换的大型网络系统[7,8]。

图1 车联网系统框图Fig.1 Car networking system block diagram
车联网技术最终的发展应该依托通信平台,而且这种通信方式应该是多模式的通信方式,传统的车与车之间的通信技术主要包括微波、红外技术、专用短程通信等[9],而本文依托时下快速发展的可见光通信,提出了一种新的前车与后车之间的车灯通信交互方式。
2 DMT调制原理
DMT是正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)技术中的一种。DMT是通过对不同的子信道发送不同长度的比特来得到最大信息流量的多载波调制的一种特殊形式, DMT调制提供了高频谱效率,并且对跨符号干扰(inter-symbol-interference, ISI)和频率选择性衰落的信道具有很强的鲁棒性[10]。
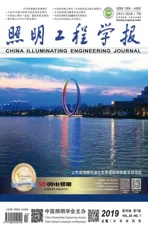
DMT系统模型如图2所示,在系统进行工作时,对输入的二进制数据先进行QAM映射然后再进行串转并。为了进行信道估计,在符号中加入导频符号,做快速傅里叶逆变换(IFFT)使各个信号调制到相互正交的子载波上,最后对信号做并串转换后将得到的串行数据经车灯LED光源发送出去。经过自由光场信道后, VLC系统接收端的光电二极管(PIN)将光信号转化为电信号。在对DMT进行解调时,信号需要进行同步,在去CP做FFT变换之前,先做串并转换。为了对各个子载波分配合适的调制方式,系统需要利用导频做信道估计。估计的结果进行并转串,最后通过QAM解映射将数据进行输出[11]。
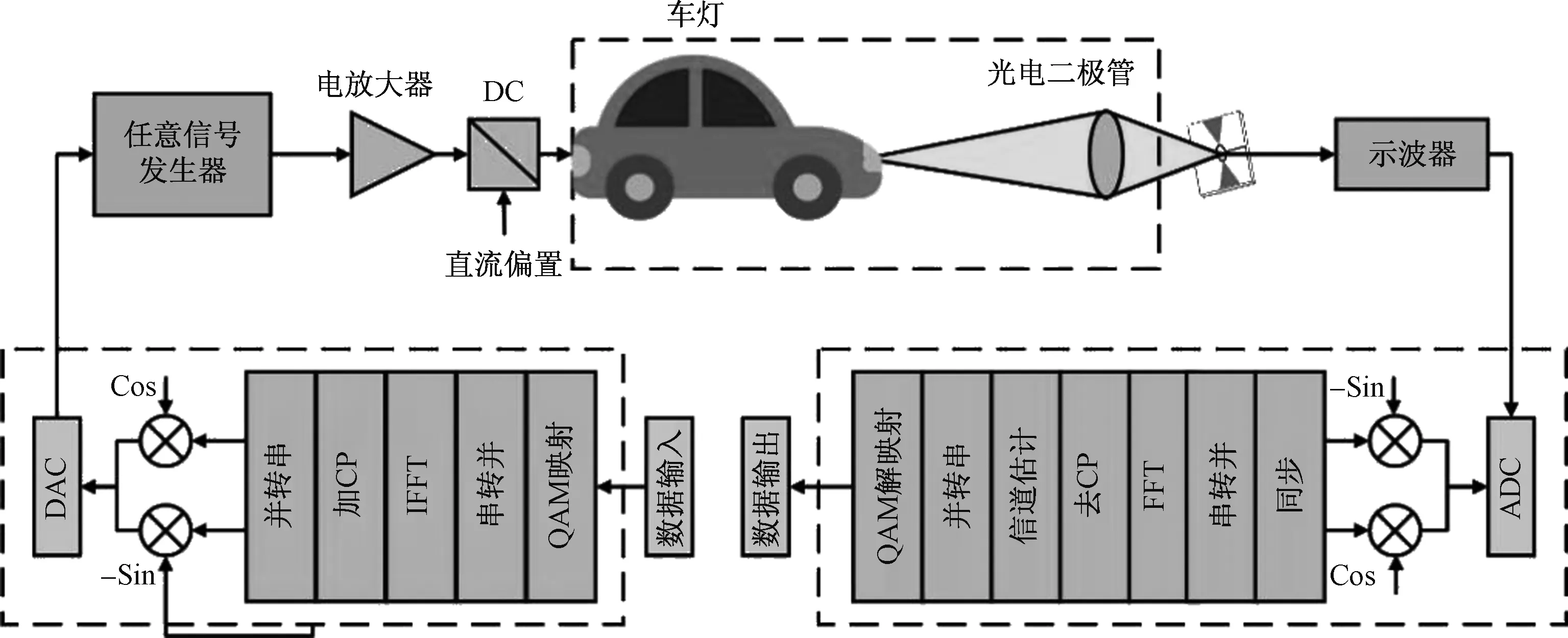
图2 可见光通信DMT调制系统模型Fig.2 DMT modulation of VLC system diagram
3 实验设置
VLC系统实验装置图如图3所示。在这个VLC系统中,我们所使用的任意波形发生器(AWG)型号是Tektronix AWG520。输出的DMT信号经过电放大器(EA)与直流偏置器(Bias Tee)交直流耦合后,加载到车灯LED。发送的信号经自由空间,通过透镜与光栅,由PIN管(滨松S6968)接收光信号并转化为电信号导入到示波器中,数据通过计算机进行离线处理,最后比较输入输出的误码率(bit error rate,BER)。发射信号为32 QAM DMT 8倍上采样,接收端接收带宽为50 MHz,示波器的采样速率为500 MHz。
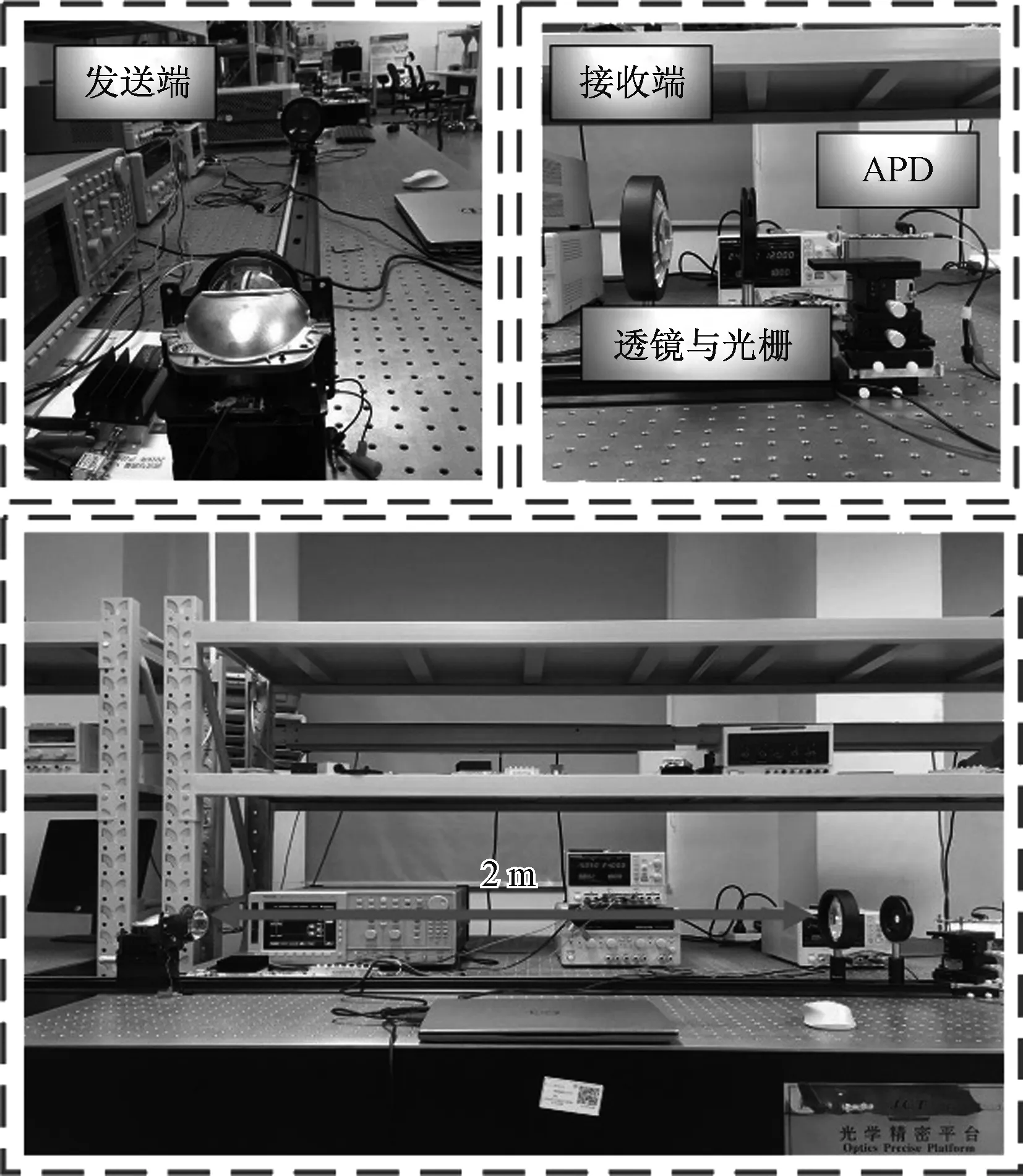
图3 VLC系统实验装置图Fig.3 The experimental setup of VLC system
4 实验结果
图4(a)表示该可见光通信系统发送信号的频谱,因为可见光系统中LED的响应曲线是呈指数衰减,所以接收信号频谱如图4(b)所示。

图4 发送信号、接收信号频谱图Fig.4 Spectrogram of the signal sent and received

图5 速率对信号性能的影响图Fig.5 Effect of data rate on the signal performance
图5所示为速率对信号性能的影响图,在做速率对信号性能影响分析的时候,设定驱动电流为380 mA,Vpp为0.5 V。我们可以从图5中看出误码率随着传输速率的增大而增大。系统传输最大的比特率为181.25 Mbps,即AWG的最高采样率为290 MHz时,误码率在3.8×10-3以下。
图6所示为距离对信号性能的影响图,在做距离对信号性能影响分析的时候,设定驱动电流为420 mA,AWG的采样率为290 MHz,即信道传输比特率为181.25 Mbps。我们将车灯LED与PIN之间的距离设定在1.2~2 m之间,测试间隔为0.2 m。我们同时采集了信号幅值Vpp为0.6 V, 0.7 V与0.8 V的三组数据进行比较。我们可以从图中发现,当VLC系统距离在1.2~2 m之间时,误码率全部都在误码门限3.8×10-3以下,由于距离增加后接收机接收到的光功率降低,系统的信噪比(SNR)降低,BER增加,这也符合预期。
图6 距离对信号性能的影响图Fig.6 BER v.s distance
最后实验测试了车灯LED驱动电流与信号幅值的影响,为的是能够找到该车灯通信的最佳工作点,驱动电流的变化范围为300~460 mA,间隔为40 mA,信号幅值变化范围在0.5~0.9 V之间,间隔为0.1 V。图7是信号幅值与驱动电流对信号性能的影响图,纵向比较系统误码率,可以看出在信号幅值一定的时候最佳工作电流为340 mA,横向比较,在工作电流一定时,最佳工作的信号幅值为0.7 V。所以当工作电流为340 mA,信号幅值为0.7 V,误码率只有5.25×10-4,因此我们也可以根据图8找到最佳工作点。

图7 信号幅值与驱动电流对信号性能的影响图Fig.7 BER v.s signal amplitude and current
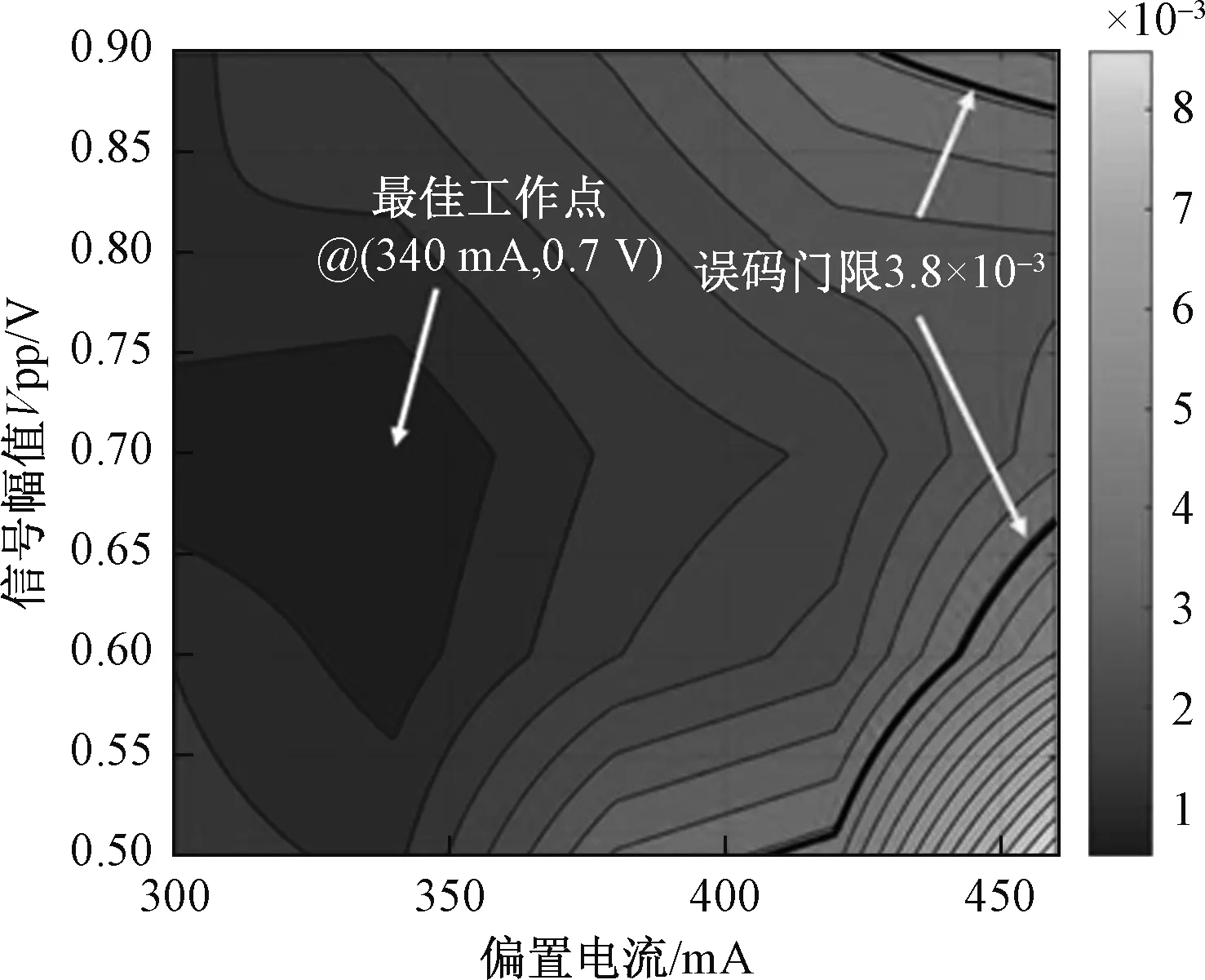
图8 工作点等高线图Fig.8 Contour map of operating point
5 结束语
我们提出了一种用在车联网中以解决车与车之间交互的LED车灯可见光通信系统。实验中使用车灯LED模组,高灵敏度的PIN接收器,采用DMT调制方式,实现将系统的传输速率达到181.25 Mbps。系统的误码性能在经过2 m的自由空间传输后仍然低于误码门限3.8×10-3。同时,通过实验找到了该车灯模组在进行可见光通信时的最佳工作点,即驱动电流为340 mA,信号幅值为0.7 V。