地基差分干涉雷达发展现状及应用实例
2019-04-04邓云开田卫明
曾 涛 邓云开* 胡 程 田卫明
①(北京理工大学信息与电子学院雷达技术研究所 北京 100081)
②(北京理工大学卫星导航电子信息技术教育部重点实验室 北京 100081)
1 引言
受到自然因素(降雨、融雪、地震等)和人为因素(采矿、地下水枯竭、植被破坏等)的影响,地质灾害在世界范围内频繁发生,每年均会造成严重的经济损失和大量的人员伤亡。2018年,我国共发生地质灾害2966起,造成105人死亡、7人失踪、73人受伤,直接经济损失达到14.7亿元(自然资源部)。滑坡灾害是地质灾害中发生频率最高和危害最大的一种,如2018年11月份在川藏交界发生的金沙江滑坡堰塞湖灾害,共造成10.2万人受灾,3400余间房屋倒塌,农作物受灾面积3.5千公顷,沿江部分地区道路、桥梁、电力等基础设施损失较为严重。
一般而言,在滑坡造成的重大事故中,露天矿边坡滑坡、山体滑坡、尾矿坝边坡滑坡和大坝滑坡的发生最为频繁,造成的损失也最大。滑坡的诱发因素很多,在边坡宏观失稳之前,均会发生应力的改变,其表面通常会出现形变[1,2]。因此,为了更深入地研究边坡滑坡的触发机理,并实现对滑坡灾害的预测预警,国内外学者开展了大量边坡表面形变测量方面的研究。
根据形变测量过程中,测量仪器是否接触被测目标区域,形变测量技术可以分为两大类:接触式测量和非接触式测量。接触式测量主要包含水准仪测量、全站仪测量、差分GPS测量等。该项技术的最大优点是成本低,操作便捷,但是只能对场景中的一些离散点进行测量,难以满足对边坡进行全覆盖形变监测的需求,而且接触式测量需要在目标区域进行测量点布设,在一些危险目标区域很难实施[3]。非接触式测量主要包括激光扫描仪测量、星载SAR(Synthetic Aperture Radar,合成孔径雷达)干涉测量、地基差分干涉测量等。激光扫描仪测量可以获取较高的形变测量精度,但光学遥感频率很高,信号波长短,对边坡进行长时间、连续形变监测时,易受雨、雪、雾等气象条件的影响[4]。星载SAR干涉测量技术,可以实现全天时全天候的大范围监测,但现阶段其观测实时性容易受到卫星重访周期的限制,且观测角度难以灵活选择,对大梯度边坡测量时,易受叠掩、阴影等问题的影响[5]。地基差分干涉测量在近些年取得了迅速的发展。
地基差分干涉测量雷达,由于其工作平台在地面上,可以在目标区域几十米到几公里外进行观测,有利于灵活地选择布设地点和观测视角,且工作在微波波段,成像时不受天气条件的影响,具有全天时全天候的优点[6]。地基差分干涉雷达的图像获取速度很快,一般为几分钟,有利于对目标区域进行连续实时观测,已经在形变监测领域得到了广泛的应用,如建筑物、露天矿坑、山体边坡、水坝、冰川等的监测[7]。
2 典型系统
地基差分干涉测量雷达,目前多工作在X波段或者Ku波段,系统组成部分主要包括收发天线、供电模块、数据采集和存储单元、数据处理模块等。按照雷达成像模式的不同,可以分为两种类型:地基RAR(Real Aperture Radar,实孔径雷达)和地基SAR。

图1 典型地基RARFig.1 Typical GB-RAR systems
2.1 地基RAR
地基RAR中,代表性的系统有澳大利亚Ground Probe公司的SSR(Slope Stability Radar)系统、瑞士Gamma公司的GPRI(Gamma Portable Radar Instrument)系统和南非REUTECH MINING公司的MSR(Movement and Surveying Radar)系统,参见图1。
SSR系统早期的两种型号SSR-XT/MT,均采用大孔径的抛物面天线来发射波束宽度极窄的铅笔状波束,然后通过高精度的伺服系统的控制,实现方位维和俯仰维的大范围逐点扫描,该系统可以直接将雷达图像与3维地形相匹配。以SSR-XT为例,其工作在X波段,监测范围为30~3500 m,1 km处分辨率为8.7 m×8.7 m,扫描180°×60°范围耗时26 min, 85°×20°范围4 min, 30°×15°范围2 min[8]。MSR系统同样基于实孔径技术,采用大孔径的抛物面天线,通过方位维和俯仰维的大范围扫描来获取3维点云,扫描120°×45°范围耗时少于4 min,60°×80°范围少于3 min。MSR系统包括4种型号:MSR60, MSR120, MSR250和MSR400,以型号MSR400为例,其最小测量距离为30 m,最大测量距离为4 km。在1 km处,距离向、方位向和高度向的分辨率分别为0.50 m, 4.40 m和0.44 m[9]。
SSR系统新型的两种型号SSR-FX/OMNI,均采用线性天线,同样可以在方位维和俯仰维实现大范围的扫描。以SSR-OMNI为例,其天线长度为2.74 m,最大监测距离可达5600 m,可以实现方位维360°、俯仰维60°的扫描,仅耗时2 min, 1 km处分辨率为4.30 m×0.68 m。GPRI系统是安装有旋转扫描仪的FM-CW(Frequency-Modulated Continuous-Wave)雷达干涉仪,采用2.06 m长的线性波导天线来发射波束宽度在方位维为0.4°、高度维为35.0°的扇形波束,扫描速率为每秒0.5°到10.0°[10]。以GPRI-II系统为例,其通过天线在方位维的大范围扫描来获取2维雷达图像,距离向分辨率约为0.75 m,方位向分辨率为6.80 m。该系统的工作频率范围为17.1~17.3 GHz,测量范围为50 m~10 km,并配备1根发射天线和2根接收天线形成一个垂直基线为25 cm的干涉阵列,从而基于干涉测高原理来获取观测区域的3维地形,并可实现形变量的3维可视化显示。
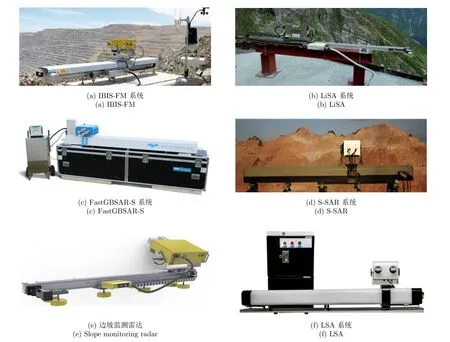
图2 典型直线扫描地基SARFig.2 Typical linear-scanning GB-SAR systems
2.2 地基SAR
按照合成孔径的实现方式,可以将地基SAR划分为以下3种类型:
(1)直线扫描地基SAR。直线扫描地基SAR是通过收发天线沿着高精密滑轨的移动来获取方位维的大合成孔径,从而实现方位维的高分辨[11]。第1款商用的直线扫描地基SAR是由意大利IDS公司和佛罗伦萨大学联合开发的IBIS(Image By Interferometric Survey)系统[12]。国内外很多研究机构和公司,开发了多款直线扫描体制的地基SAR系统,代表性的有意大利IDS公司的IBIS-FM系统、欧盟JRC的LiSA系统[13]、荷兰MetaSensing公司的FastGBSAR-S系统[14]、西班牙UPC大学的RiskSAR系统[15]、中国安全生产科学研究院(安科院)的S-SAR系统[16]、北京理工雷科电子信息技术有限公司(理工雷科)的边坡形变监测系统[17]、内蒙古自治区方向图公司的微变监测雷达LSA系统等(参见图2)。此外,北方工业大学、日本Tohoku大学、英国Sheffield大学等也开展了各自地基SAR系统的研究。各款直线扫描地基SAR的工作原理相似,但在一些工作参数上有所不同,如距离向分辨率、方位向分辨率、测量范围、扫描时间等,如表1所示。
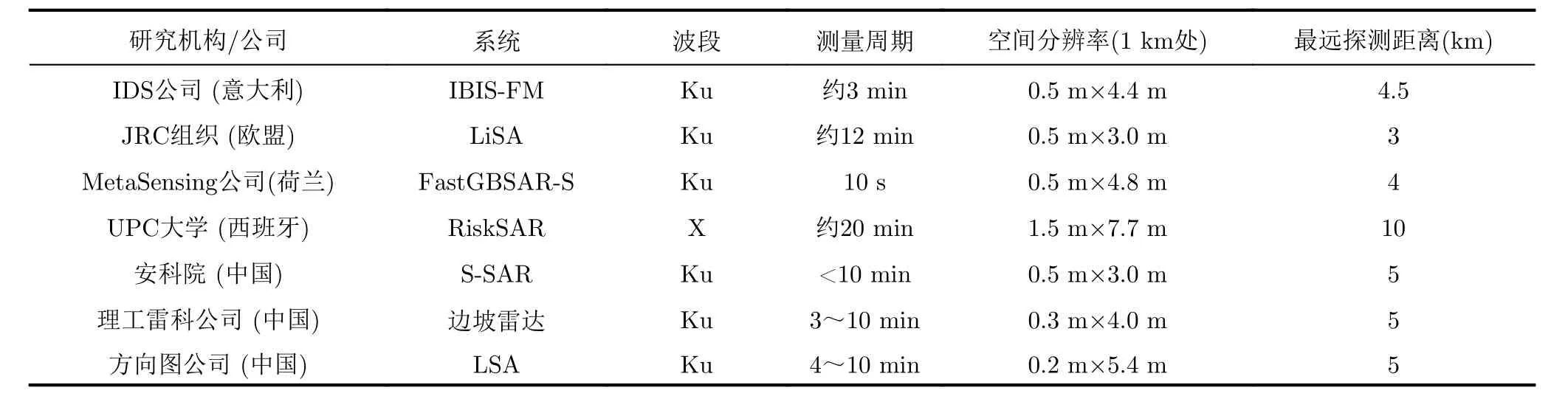
表1 直线扫描地基SAR参数表Tab.1 Parameters of linear-scanning GB-SAR

图3 典型弧线扫描地基SARFig.3 Typical arc-scanning GB-SAR systems
以IBIS-FM系统为例,其工作在Ku波段,最远探测距离为4.5 km, 1 km处的空间分辨率为0.5 m×4.4 m,快速扫描时间约为3 min,可以获取亚毫米量级的形变测量精度。在SAR图像合成及处理阶段,其将线性调频连续波技术、合成孔径雷达技术、干涉测量技术和永久散射体技术相结合,可以应用于对矿山边坡、水电站大坝、冰川等的实时形变监测。
(2)弧线扫描地基SAR。弧线扫描地基SAR通过收发天线在水平面内的圆周运动来进行圆弧扫描,从而获取大的合成孔径。由于弧扫描地基SAR采用特殊的运动形式来实现圆弧式合成孔径,在成像算法上,与直线扫描地基SAR有所不同[18,19]。代表性的系统如韩国国立江原大学开发的ArcSAR(Arc-scanning SAR)[20]、意大利IDS公司的IBIS-ArcSAR系统[21]、中国科学院电子学研究所的Arc FMCW-SAR系统[22]和内蒙古方向图公司的微变监测旋转雷达RSA系统等(参见图3)。
韩国ArcSAR系统,其有2种成像模式:聚束模式和扫描模式。在聚束模式下,可以获取比常规线扫描地基SAR更高的方位向分辨率,在扫描模式下,可以实现近360°的大范围扫描。意大利IBISArcSAR系统,采用4只基于MIMO技术的天线,可以实现自动地理编码,实时获取场景数字地形模型,扫描360°范围时只需要40 s,最大测量距离可达5 km,单台系统便可实现对大型矿坑的完全覆盖。
(3)MIMO地基SAR。直线扫描和弧线扫描两种工作体制,均需要伺服系统控制收发天线进行特定的机械扫描,图像获取的速度会受限,一般为几分钟至十几分钟。为减少图像的获取时间,提高地基雷达在快速形变监测领域的应用,国内外一些机构开展了MIMO(Multiple-Input Multiple-Output,多输入多输出)体制地基SAR的研究。地基MIMO雷达采用多输入多输出技术,通过多个发射天线和接收天线的特殊排列来等效成一个大的合成孔径。由于稳定的正交波形设计这个难题暂未得到有效解决,地基MIMO雷达工作时,各个发射天线分时发射,各个接收天线则同时接收,一次完整的扫描时间为几毫秒到几秒。代表性的地基MIMO雷达,如欧盟JRC机构的MELISSA系统[23]、北京理工大学(北理工)研发的MIMO-SAR系统[24]等(参见图4)。
以北理工MIMO-SAR系统为例,其采用16个发射天线构成两个密集子阵列和16个接收天线构成一个稀疏子阵列,可以等效成一个拥有256个采样点的合成孔径。该系统工作在Ku波段,波长为λ=1.86cm ,每个密集子阵列中相邻发射天线的距离间隔为 λ/2=0.93cm,稀疏子阵列中相邻接收天线的距离间隔为 8 λ=7.44cm。系统的等效合成孔径为1.138 m,角分辨率为0.466°,测量距离范围为30 m~3 km。

图4 典型MIMO地基SARFig.4 Typical MIMO GB-SAR systems

图5 部分地基RARFig.5 Some GB-RAR systems
上述地基RAR系统和SAR系统主要应用于对较大范围测量(雷达测量面积在1 km2左右)的场景,如矿区边坡、山体、水坝等的形变监测。各系统均可以实现方位向和距离向的高分辨(分米或者米量级),并基于差分干涉测量技术实现高精度的形变测量。一些地基RAR系统,如荷兰MetaSensing公司的FastGBSAR-R系统、意大利IDS公司的IBIS-FS系统等(参见图5),均采用将收发天线固定在三脚架上的结构,工作时不进行方位维和俯仰维的扫描,通过对单一目标体进行可达上百赫兹的高频率观测,可以实现对桥梁、高塔、大楼等的振动测量,测振精度可达0.01 mm。一些地基SAR系统,如图4所示的两款MIMO地基SAR,由于图像获取速度快,耗时在毫秒量级,也可以选择出一些像素点来进行振动分析。在可控实验条件下,MELISSA系统的图像获取速度优于4 ms,基于振动角反的测量结果表明,其测振精度优于10 μm[25]。
3 技术现状
对于不同工作体制的地基差分干涉雷达,其处理技术上会有一定的差别。本节以应用于对较大范围场景进行形变监测的地基SAR系统为例,介绍地基差分干涉雷达的技术现状。虽然3种类型的地基SAR:直线扫描、弧线扫描和MIMO,在SAR技术,即高分辨成像处理上有着较大的差别,但差分干涉处理流程相似[26,27]。
在地基SAR差分干涉处理技术上,国内外很多学者提出了不同的形变处理算法,虽然处理流程上会有一些差别,但主要的处理技术相同,包括差分干涉、PS点选择、相位解缠、大气相位补偿、形变量解算和地理编码等5个步骤[28]。如果有N幅地基SAR图像,可以先进行PS点选择,然后将第1幅作为主图像,其他N-1幅作为辅图像,经过差分干涉处理,获取N-1幅差分干涉图。基于选择出的PS点,对这N-1幅差分干涉图进行相位解缠和大气相位补偿处理,即可以实现形变量的解算,处理流程如图6所示。如果地基SAR应用于实时形变处理,考虑到地基SAR的图像获取速度较快,一般是每隔几分钟即可获取1幅SAR图像,1天时间即可以获取上百幅SAR图像,为保证形变测量的实时性,需要采用不同的差分干涉处理流程[29]。

图6 地基SAR差分干涉处理流程Fig.6 Differential interferometric scheme of GB-SAR
3.1 差分干涉
地基SAR可以实现2维高分辨成像,在距离维上,通常采用调频连续波技术或者步进频技术,在方位维上,则采用合成孔径技术。图像中每一个像素点均是复数,其幅度通常用来解译成像场景及研究散射特性,相位则可以用来获取目标区域的高程或者形变信息。地基SAR进行形变测量时,雷达位置固定不动,不同图像之间的空间基线为零,对两幅图像进行对应像素的复共轭相乘,即可以实现差分干涉处理。图7所示为地基SAR差分干涉测量原理示意图。理想情况下,差分干涉相位 Δ φ与视线方向的形变量ΔR线性相关,关系可以表示为

其中,λ表示信号波长。
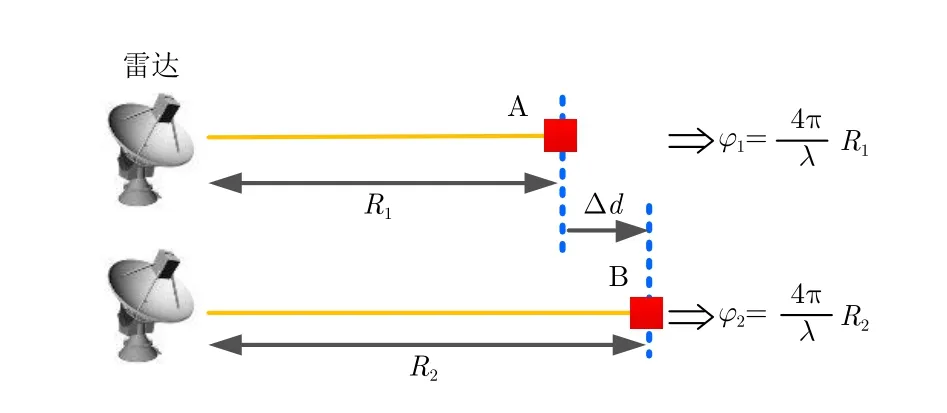
图7 差分干涉原理示意图Fig.7 Schematic diagram of differential interferometry
实际中,受到各种误差源的影响,差分干涉相位Δ φ中还包含其他分量,可以建模为

其中,φdefo为形变相位分量;φatm为两幅图像获取期间由气象条件改变所导致的大气相位分量;φgeom为重轨误差所导致的几何相位分量,一般可以忽略不计; φnoi为像素点散射特性改变及系统热噪声等带来的误差相位分量,在差分干涉处理后,可以经过干涉相位滤波处理来进行滤除。由于相位周期性的影响,差分干涉相位 Δ φ是缠绕的,处在区间 [ -,)内,k表示相位模糊度,且是一个整数。
3.2 PS点选择
在利用像素点的相位信息进行形变测量时,差分干涉相位的质量直接影响到形变测量的精度。但受到大气扰动和热噪声等非理想因素的影响,对低相位质量的像素点,一方面难以进行正确的相位解缠,另一方面对其进行形变分析时会出现较大的测量误差。因此,地基SAR差分干涉处理时,通常需要选择出一些高质量的像素点,即为PS(Permanent Scatterer,永久散射体),来进行形变分析。
在地基SAR领域,广泛采用幅度离差法来进行PS点的选择。该方法利用对一个像素点的幅度稳定性的估计来代替对其相位稳定性的估计,一般而言,至少需要20幅SAR图像[30]。一个像素点的幅度离差值(ADI, Amplitude Dispersion Index)DA定义为

其中,σA和mA分别表示该像素点的时序幅值序列的标准差和均值。对DA设置一定的阈值DT,选择准则为DA≤DT,即可实现PS点的选择。DT的取值范围一般为0.10~0.25。图8所示分别为一植被覆盖山体边坡的照片和基于30幅图像计算出的ADI图,可以看出,无植被覆盖区域的ADI一般在0.2以下,有植被覆盖区域的ADI则在0.5以上,说明了PS点一般处在裸露的岩石区域,植被区域像素点的幅度稳定性很低[31]。
由于地基SAR获取图像时的空间基线为0,时间基线为几分钟到十几分钟,一般情况下,基于幅度离差法选择出的PS点,其密度和质量均可以满足高精度形变测量的需求。为进一步提高PS点的质量,可以在幅度离差法的基础上,基于信杂比、时序相关系数等进行二次选择[32]。在地基SAR应用于对缓慢形变区域进行非连续监测(时间基线达几十天),或对有植被覆盖区域进行常规连续观测时,如果采用幅度离差法来选择PS点,其密度或质量可能无法满足形变监测需求,可以采用在星载SAR领域常用的其他方法,如StaMPS方法、SqueeSAR方法和PSP方法等[33,34]。
3.3 相位解缠
由于干涉相位图是缠绕的,为实现正确的形变测量,需要对其进行相位解缠,即从式(2)中解出相位模糊度k。常规干涉SAR的相位解缠是在相邻像素点之间进行的,包括路径跟踪法和最小范数法等,但PS点是离散、非均匀地分布在地基SAR差分干涉图上的,常规解缠方法不再适用。为实现对PS点的相位解缠,常用非均匀网格下的最小费用流算法或者最小二乘方法等[35]。以最小费用流算法为例,首先根据PS点的分布,采用Delaunay三角网生成算法构建不规则三角网,然后计算每一个三角形的残差值,采用最小费用流算法计算相位模糊度,最后在三角网中对缠绕相位积分,实现相位解缠。
为提高相位解缠的准确度,可以在干涉图中选择出一些高质量参考点或者人工布设若干个控制点来辅助解缠,也可以对最小费用流算法做出适当的改进[36]。Noferini等学者[37]在采用地基SAR系统进行长时间基线的非连续形变监测时,针对最小费用流解缠算法会出现较大误差的问题,提出了考虑PS点形变速率的改进方案,极大地提高了相位解缠准确度,对比结果如图9所示。
在采用地基SAR进行实时形变监测时,为保证相位解缠的准确度,一般还会考虑时间维的1维解缠,这样相位解缠转化为兼顾方位维、距离维和时间维的3维解缠问题[38]。在1维时间维上,可以采用卡尔曼滤波或者欧拉方法来进行解缠。

图8 典型PS点选择结果Fig.8 Typical PS selection results
3.4 大气相位补偿
大气会影响到电磁波的传输速率及路径,因此不同时刻大气条件(温度、湿度、大气压)的改变会造成不同的传输延迟,从而干涉相位中存在大气相位分量。大气相位可以建模为

其中, ΔN表示折射率的变化,其随时间t和空间r变化,L表示信号的传输路径。
在进行大气相位补偿时,一般假设大气在空间上是均匀的、在时间上是随机的,则大气相位φatm呈现出随斜距而线性变化的趋势。对于Ku波段的地基SAR,在20°C, 1 km的距离上,仅1%的湿度变化就可以带来约2 mm的测量误差。最基本的补偿方法包括气象数据法、控制点校正法和基于PS技术的参数模型法[39]。方法1通过在目标区域布设气象站,获取气象参数,包括温度、湿度和大气压,之后根据大气折射经验模型对大气相位进行定量的分析。方法2则是在目标区域内人工布设或者选择若干个强散射体目标,然后对这些控制点的干涉相位进行分析,通过插值来消除其他像素点的大气相位。在缺少气象参数或者外部控制点时,可以采用方法3,建立合理的大气相位模型,然后基于PS点的解缠相位迭代估计模型参数,进一步实现大气相位的补偿[40]。图10所示为Huang等学者[41]采用方法2,对一干涉相位图进行大气相位补偿前后的结果,补偿后图像中大部分像素点的相位在0 rad左右,有效地减少了大气相位对形变测量的影响。
在雷达的观测范围过大,或者存在较大的高程差异时,大气在空间上不再是均匀变化时,大气相位随斜距而线性变化的模型会存在较大的误差。Iglesias等人[42]采用地基SAR系统对一高山进行了长期观测,雷达观测区域的高程差达400 m,并沿山体道路布设了多处气象站,分析得出气象条件会随着斜距和高程而发生变化。文章提出了兼顾斜距和高程的多参数模型,如式(5)所示,β1和β2为待估计参数,hn和rn分别表示第n个PS点的高程和斜距,然后建立线性方程组,迭代估计出β1和 β2。
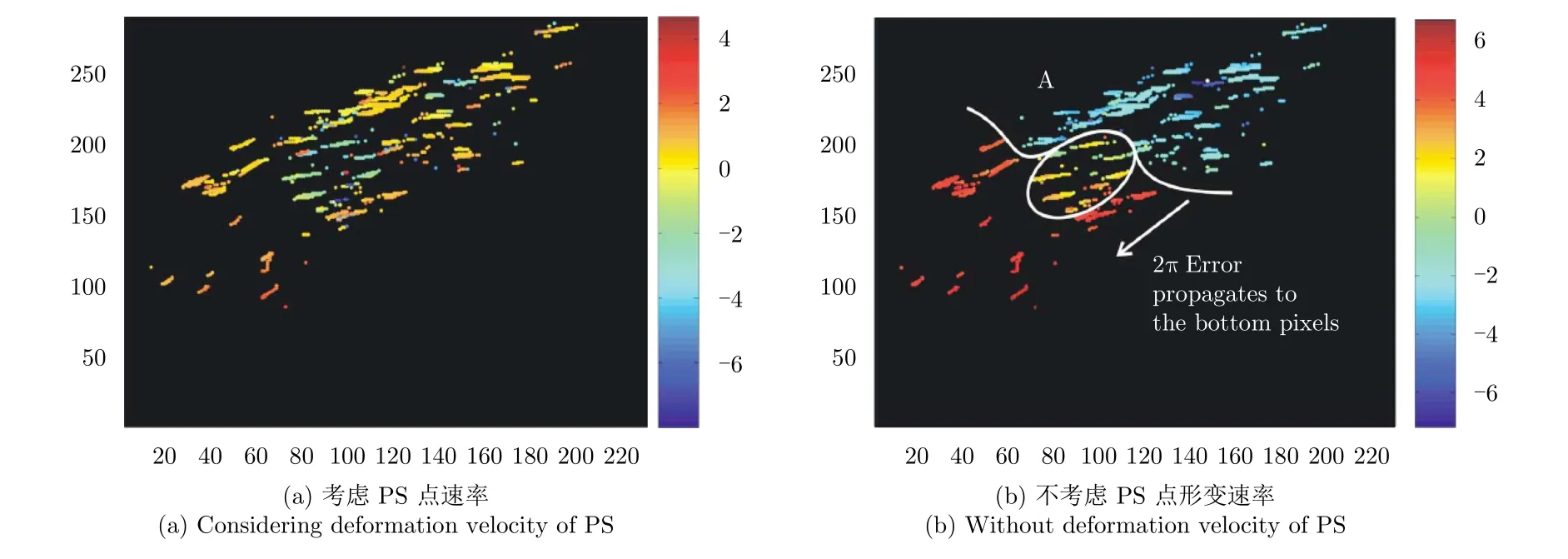
图9 相位解缠结果Fig.9 Phase unwrapping results
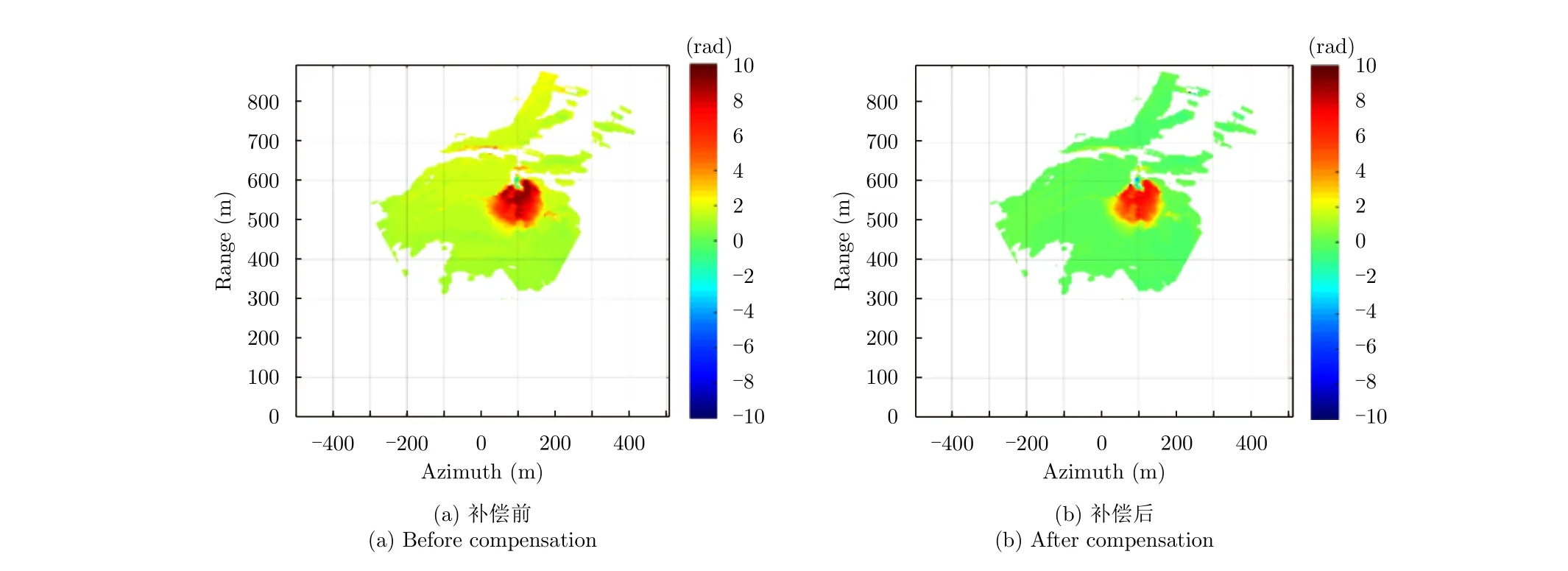
图10 干涉相位图Fig.10 Phase interferogram

3.5 形变量解算和地理编码
经过上述处理,可以获取到形变相位 φdefo,基于式(1)即可以实现形变量的解算。值得注意的是,雷达测量的是1维视线方向的形变量,即为目标区域的真实形变量在雷达视线方向的投影分量,需要将形变量在3维地形上进行准确的定位及显示,即地理编码问题。对于地基RAR系统,除基于差分干涉进行形变测量外,一般也同时具备3维地形测量能力,可以很方便地进行地理编码。对于地基SAR系统,成像时是将3维地形在雷达的2维成像平面内进行投影,其地理编码问题,可以视为一个由雷达2维成像坐标系向空间3维直角坐标系转换的问题。考虑到地基SAR系统一般不具备3维地形测量能力,为实现地理编码,可以使用激光扫描仪来辅助测量[43]。经过地理编码,有利于确定发生形变的区域,从而进一步开展形变量和形变速率分析,实现滑坡灾害的预测预警等[44]。
4 应用实例
地基SAR已经在形变监测领域得到了广泛的应用,国内外学者已经发表了很多篇文章来阐述地基SAR的应用案例。本文以北京理工大学雷达技术研究所开展的3次监测实验,即马兰庄露天开采边坡监测、贵州纳雍滑坡后续监测和桥梁振动测量实验为例,展示地基差分干涉雷达的典型应用。
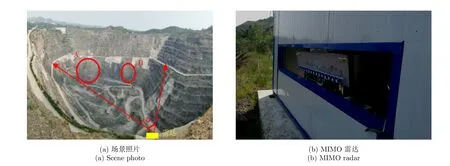
图11 实验信息Fig.11 Experimental information

表2 MIMO雷达参数表Tab.2 Parameters of the MIMO radar system
4.1 露天开采边坡监测
马兰庄露天开采边坡(E118°36′, N40°06′)位于河北省迁安市马兰庄镇,该露天矿坑呈椭球形,整个矿坑长半轴约1100 m,短半轴约900 m。矿坑边坡为典型岩质边坡,无植被覆盖,最大开采深度大于200 m,边坡倾角为38°~47°[45]。图11(a)所示为场景照片,黄色矩形代表雷达的布放位置,雷达成像时的角度范围设置为60°,红色椭圆A和B所示为形变区域。图11(b)所示为MIMO雷达现场布放照片,系统布放在一活动板房内,避免雨、雪等天气的影响。
为评估该边坡的稳定性,采用北理工研发的MIMO体制地基SAR,对该边坡进行形变监测,系统参数如表2所示。监测时间段为2017年7月19日14时至2017年7月29日9时,累计获取了2010幅MIMO雷达图像。在形变监测阶段,每一幅图像的数据获取时间加形变处理时间约为7 min。
图12(a)所示为极坐标系下的成像结果,边坡区域内像素点的幅度值分布在-30~0 dB范围内[46]。图12(b)所示为基于图像1和图像2获取的差分干涉相位图,边坡区域内像素点的干涉相位在0 rad左右,边坡区域外像素点的干涉相位则随机变化[47]。
图13(a)所示为基于这2010幅MIMO雷达图像获取的累积形变量结果,在这11天的监测周期内,有两部分区域A和B呈现出明显的负形变量,负号代表向着靠近雷达的方向形变。图13(b)所示为将形变信息反投到3维立体图上的结果,结合矿坑照片,可以确定形变区域处于图11(a)中的区域A和区域B。
为了更好地说明区域A和区域B的形变情况,结合形变量曲线和形变速率曲线来进行进一步的分析。形变量测量曲线如图14(a)所示,区域A和区域B的最大形变量分别达到了-15.45 mm和-30.13 mm,且均随时间连续变化。对形变量测量曲线进行时域差分及滤波处理,即可以得到形变速率测量曲线,如图14(b)所示。区域A和区域B的最大形变速率分别达到了-0.519 mm/h和-2.232 mm/h,且均出现在2017年7月21日上午6时左右。原因可能是在该时间点,施工人员对该矿坑开展了爆破工作,导致这两个区域出现了明显的形变加速。
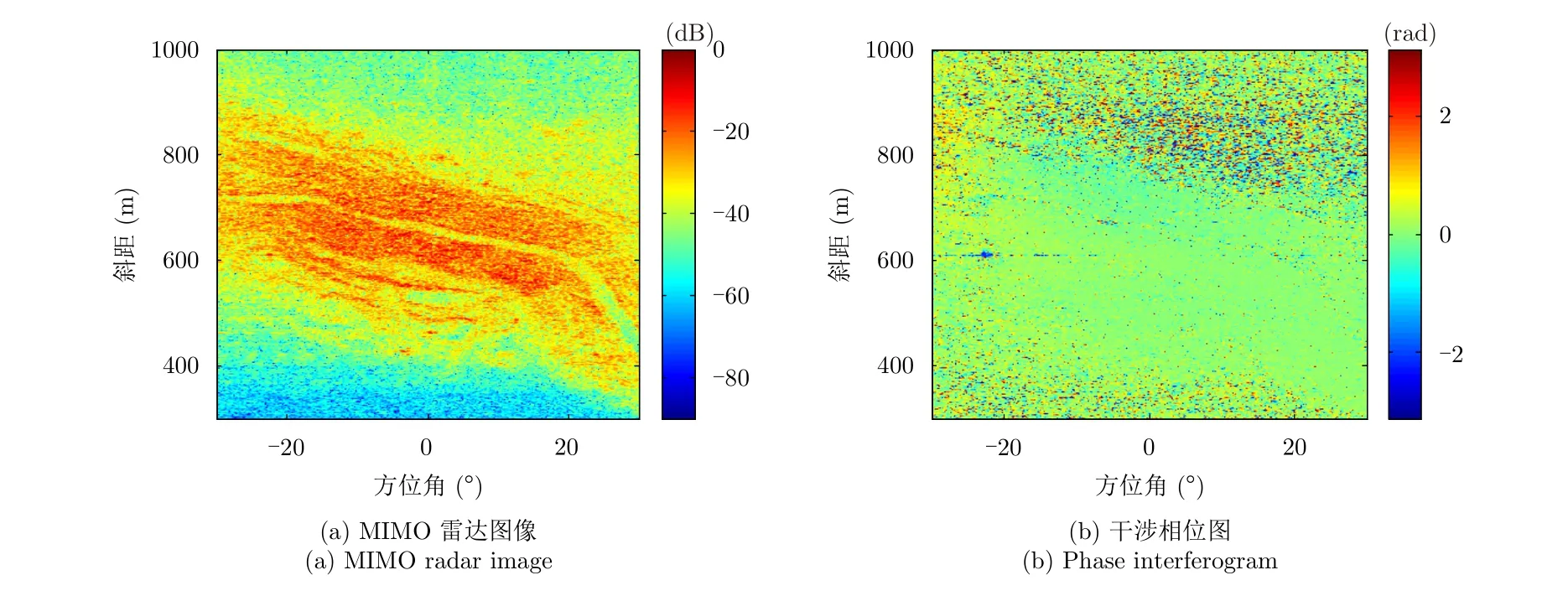
图12 MIMO雷达图像与干涉相位图Fig.12 MIMO radar image and phase interferogram

图13 形变测量结果Fig.13 Deformation measurement results

图14 形变分析结果Fig.14 Deformation analysis results
4.2 山体滑坡后续监测
2017年8月28日上午10点40分,贵州省毕节市纳雍县张家湾镇发生一起较大规模的山体垮塌,且后续发生了若干次小规模滑坡。为了对滑坡后的山体边坡开展形变监测,采用理工雷科公司开发的边坡形变监测雷达(直线扫描地基SAR,见图2(e)),于2017年8月31日21时至2017年9月8日16时,对垮塌残余体进行了不间断实时监测。现场监测照片如图15所示[48]。
图16所示分别为从2017年8月31日21时开始形变监测,到2017年9月2日16时、2017年9月4日16时、2017年9月6日16时和2017年9月8日16时的积累形变测量结果。可以看出,随着监测时间的增加,部分区域的形变量明显增大。
将2017年9月8日累积形变测量结果投影到3维地形图上,如图17(a)所示,可以看出该山体边坡上有两块区域(区域A和区域B)的形变量较大,结合形变量曲线和形变速率曲线来分析区域A和区域B的形变情况。可以看出,区域A和区域B的形变变化趋势很接近,均在2017年9月2日5时左右和2017年9月5日9时左右出现明显的变形加速。结合现场的天气条件来看,很可能是由于降雨导致的变形加速。2017年9月5日上午,区域B的形变速率达到了最大值,约-8.2 mm/h,随后区域B发生了崩塌。这也说明了基于地基差分干涉雷达来进行滑坡灾害预报预警的可行性。

图15 纳雍滑坡灾后现场监测照片Fig.15 On-site monitoring photo after the Nayong landslide

图16 累积形变测量结果Fig.16 Cumulative deformation measurements
4.3 桥梁振动测量实验
基于微波干涉原理,地基雷达可以对桥梁、高楼、高塔等结构体的振动进行测量,其具有快速、高精度、非接触等优点[49]。但振动测量技术,与较大范围场景的形变测量技术相比,有着较大差别。一般来说,振动测量是对单一像素点的时序变化序列进行分析,形变测量则侧重于对整幅雷达图像进行分析。振动测量的基本处理流程,主要包括回波信号处理、强散射点提取、杂波抑制、振动点检测、振动参数估计等步骤[50]。
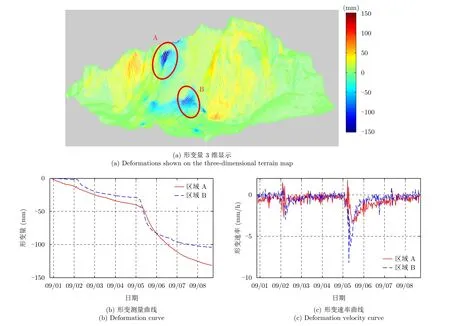
图17 形变分析结果Fig.17 Deformation analysis results
现阶段国内外应用于振动测量领域的雷达系统主要是采用RAR体制,地基RAR系统仅具有1维距离向分辨率,对干扰信号的抑制能力弱,且不利于对振动区域进行准确定位。地基MIMO雷达的图像获取速度较快,具有2维高分辨能力,有利于对振动区域进行准确地识别,且从雷达体制上提高了干扰信号的抑制能力,展现了其在振动测量领域进行应用的潜力。本文采用北理工自主研发的MIMO雷达,开展了目标对象分别为角反和桥梁的两次测振实验,初步探讨了其应用于振动测量的可行性。
MIMO雷达系统的参数如表2所示,其发射信号为调频连续波,则发射信号时宽等价于PRT(Pulse Repetition Time, 脉冲重复周期)。MIMO雷达工作时,16个发射天线依次分时发射,16个接收天线分为4组,每4个接收天线为1组,各组依次分时接收,则MIMO雷达的一次完整采样周期对应64个PRT,即一次振动采样周期为64个PRT。2次实验中,均将PRT设置为0.25 ms,则振动采样周期为16 ms,系统可测量的最大振动频率为31.25 Hz。
首先利用可装置角反的振动校准仪来开展验证实验。实验中,调整角反的振动方向,使其沿雷达视线方向,连续采集100个振动采样周期作为1组数据,则每组数据的采集时长为1.6 s。通过调整校准仪的振动幅度和振动频率(见表3),采集了7组实验数据。图18所示分别为实验场景和校准仪照片,角反的棱长为8 cm,校准仪与雷达之间的距离约为9 m[51]。
图19(a)所示为MIMO雷达成像结果。在进行振动测量时,基于每组数据的100幅MIMO图像,首先选择出一些强散射点,图中幅值最强点对应角反,然后提取每一个强散射点的相位序列,进行杂波抑制和振动参数提取。图19(b)所示基于第1组数据,获取的部分强散射点的振动频率测量结果。
这7组数据的振动测量结果如表3所示。分析结果表明,MIMO雷达的振动频率测量精度很高,角反的振动频率在10~20 Hz范围内时,测量误差在5% 以内。
之后采用MIMO雷达对一桥梁进行了振动测量,实验地点选择在北理工校园西北侧的苏州桥,实验时间为2018年7月20日。图20所示分别为实验场景照片和成像结果。
实验时连续获取了100幅雷达图像,并选择桥墩进行振动分析。图21(a)所示为桥墩处像素点的时序相位变化序列,在这100幅图像中呈现出明显的正弦变化形式。对该相位序列进行相位滤波和傅里叶变换,振动频率提取结果如图21(b)所示,图中峰值点的频率约为0.63 Hz。本次实验初步验证了MIMO雷达对桥梁振动的测量能力,还需要结合其他设备来验证结果的可靠性,有待对数据进行进一步处理。

表3 振动测量结果Tab.3 Vibrating measurement results

图18 实验信息Fig.18 Experimental information

图19 振动分析结果Fig.19 Vibration analysis results
5 总结
本文综述了地基差分干涉雷达的发展现状及应用实例。首先介绍了地基差分干涉雷达的典型系统,按照成像模式的不同,将其划分为地基RAR和地基SAR两种类型,然后按照合成孔径的实现方式,将地基SAR划分为3种类型:直线扫描、弧线扫描和MIMO。之后以地基SAR为例,详细介绍了差分干涉形变测量技术,包括差分干涉、PS点选择、相位解缠、大气相位补偿、形变量解算和地理编码等5个关键技术。最后以3次地基差分干涉雷达监测实验为例,展现了其在露天边坡监测、山体滑坡监测和桥梁振动测量方面的应用。

图20 实验信息Fig.20 Experimental information

图21 实验分析结果Fig.21 Experimental analysis results
