运用人工鱼群算法的3D扫描碎片重建探究
2019-04-03刘恩盛程效军黄玉花
刘恩盛,程效军,黄玉花
(1. 同济大学测绘与地理信息学院,上海 200092; 2. 井冈山大学,江西 吉安 343009;3. 现代工程测量国家测绘地理信息局重点实验室,上海 200092)
随着三维激光扫描技术的发展,其应用领域逐步渗透到文物保护工作中[1-2]。文献[3]提出了一种利用特征点分割碎片轮廓曲线,并分析各子轮廓之间的相似性以解决陶瓷碎片的计算机辅助修复问题。针对文物模型几何形状对噪声敏感的特性,文献[4]利用GPU的高性能图像处理能力,通过对碎片深度图像进行层次分析,实现了碎片的拼接。文献[5]通过提取陶瓷碎片局部纹理、颜色信息特征,并结合其他知识,如考古学家的经验、碎片的出处、所处时期的工艺水平等,对文物进行了虚拟修复。文献[6]通过顶点的积分不变量计算,勾勒出碎块表面的尖锐边缘线,并对断裂面进行分割,基于向前搜索技术和表面一致性的约束方法将两两断裂面匹配、融合,从而实现了整体重建。以上方案存在一定的局限性,当碎片缺失时容易出现拼接错误,其次是边缘的提取、顺滑处理过程较为复杂。此外,三维空间的多碎片拼接是对象初始模型的重建过程,需要考虑不同匹配之间的全局一致性。所有碎片的拼接过程,可以看成是鱼的集群。在一片水域中,鱼生存的数目最多的地方一般就是本水域中富含营养物质最多的地方,依据这一特点来模仿鱼群的觅食等行为,从而实现全局寻优[7]。
1 基于粗糙集理论的碎片分类方法
碎片包含了多种特征,单一特征作为拼合依据往往有其弊端,而多碎片及多特征也造成依据选择成为难题。粗糙集理论是一种处理不一致信息的数学工具[8],可以有效地解决决策分类问题,涉及不确定性、不精确或不完整信息[9-10]。本文在前人点云特征提取研究基础上[11-14],对点云提取边缘和几何特征,并采用决策表分析得到分类。
1.1 碎片点云特征提取
文物通常具有旋转轴线,其碎片同样具有轴线和对应的大小不等的半径。要确定轴线和半径需要对点云数据进行曲线拟合,本文采用三维中心滤波圆弧拟合方法。首先对碎片点云数据进行中心滤波处理,再将碎片点云进行圆心拟合,最后计算半径并求出轴线。算法流程如下:

(1)

(2)
(3) 求取点到中心点的距离方差δ。
(4) 求取点的均方差RMS。
(5) 滤除到中心点距离方差δ大于n倍均方差RMS的点,其中n为给定的阀值。
(6) 使用最小二乘拟合圆并求取半径值
R=sqrta·a+b·b-4·c/2
(3)
(7) 根据圆心坐标拟合出轴线。
1.2 粗糙集理论的决策表分类
待拼合碎片构成一个集合G,G={T1,T2,…,Ti,Tn},每块碎片都有边缘、颜色、半径及专家经验等属性。根据RGB值域范围,这里把碎片集分成R={颜色1、颜色2,颜色3}3个大类,则所有颜色1的碎片构成集合为X1={T1,T2,T5},颜色2的碎片构成集合为X2={T3,T8}、颜色3的碎片为X3={T4,T6,T7,T8}。按照颜色属性将碎片集合G进行了划分。三维中心滤波圆弧拟合可以获得碎片的半径值,这里取半径的最大值、最小值和中值。通过对半径值分析构成一个大小集合S={d1,d2,…,dn}。此外还有专家经验构成的材质集合E={e1,e2,…,en}。在属性决策分类中信息并不完备,见表1,本文“#”代表该值无法得到(受限于仪器和器物本身遮挡影响,碎片部分扫描数据缺失),“*”表示后面总要作出决策。对于碎片集G中包含的属性要素(最大值、中值、最小值、纹理)给定容差值,判断第i块碎片与第i+1块碎片的相似度,作为划分依据。
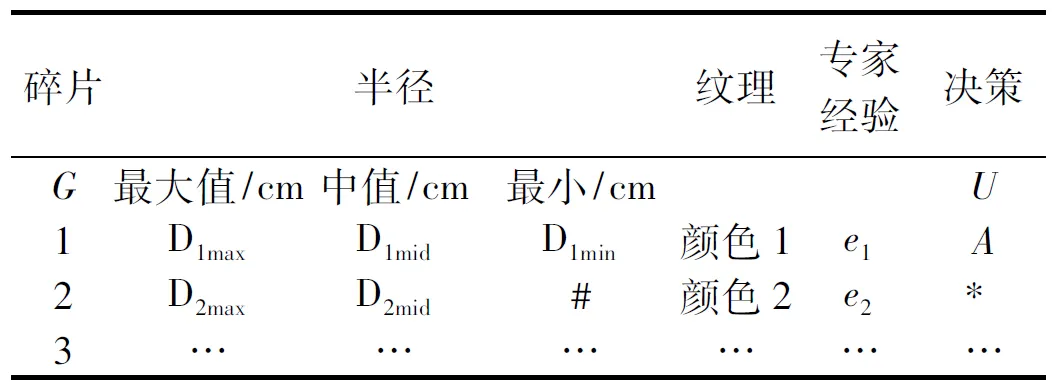
表1 不完备属性决策分类
虽然决策表提供了决策信息,但依然是粗糙的,而且碎片的某些属性值无法全部确定,造成碎片分类集的划分不完全。对于不完备信息的处理,目前主要有两种方法:数据补齐法和模型扩展法[15-16]。
2 碎片全局匹配
碎片全局匹配问题是一个非线性、多数量特征匹配优化问题。针对碎片,利用编码机制将特征匹配方案空间映射到一个编码空间,并给定约束条件,基于鱼群算法对此编码空间进行搜索,以得到最优方案,进而按照产生的匹配方案来进行碎片整体拼合。
假设一个完整的文物破碎之后由n个碎片组成,这些碎片可以用集合GA表示为GA={TA1,TA2,…,TAi,…,TAn},n为碎片的个数,i为1到n(n≥2)中的任意一个值,第i个碎片TAi包含多个断裂面。此处研究对象为薄壁文物,一个断裂面近似地用一条最能够反映出其特征的边缘表示,则碎片TAi的断裂面可以用集合LAi表示,LAi={lAi1,lAi2,…,lAii,…,lAin},其中lAi1表示碎片TAi的第i个断裂面上的第1条边缘,lAi2表示碎片TAi的第i个断裂面的第2条边缘,lAin表示碎片TAi的第i个碎片的第n条边缘。
在匹配过程中,碎片集中任意两个断裂面间可能相互匹配,但是同一碎片内的各断裂面不会相互匹配,整个可能匹配断裂面可以通过矩阵M=TAijn×n表示,其中,n表示断裂个数,i、j为断裂面编号。在不考虑其他约束条件的情况下,得到矩阵为
TA11TA12…TA1nTA21TA22…TA2n…n
(4)


(5)

(6)
3 试验分析
为验证本文碎片匹配方法的有效性,进行了如下试验。试验对象为一个破碎陶罐和两个破碎瓷器的碎片,碎片存在缺失及边缘磨损情况,如图1所示。通过手持式三维扫描仪获取碎片点云数据,如图2所示。
选取边缘长度作为感知因子,步长为0.83,得到初始矩阵。再选取边缘对应碎片的拟合半径区间中值作为匹配感知因子,步长为0.9,将前一步得到的匹配矩阵进一步优化。进一步改变感知因子,选取颜色纹理特征作为匹配依据进行优化。如断裂面处于彩色区域则与之匹配的另一边一定具有彩色,颜色特征可以通过灰度值进行计算。设定步长为0.2,进一步优化。通过不断优化,得到可能匹配对的信息为
{(TA13,TA26),(TA13,TA411),(TA24,TA513),(TA24,TA514),(TA25,TA612),(TA25,TA615),(TA26,TA38),(TA26,TA615),(TA38,TA512),(TA37,TA616),(TA411,TA514),(TA411,TA616),(TA514,TA616)}=TAij
改变感知因子,可获得唯一匹配(TA37,TA616),此时该匹配作为确认匹配对,进而依次去除:(TA411,TA616),(TA514,TA616),(TA13,TA411),(TA24,TA513),(TA26,TA38),(TA26,TA615),(TA25,TA615)。编号TA11和TA12没有获得匹配结果,但是TA13得到了匹配。终止算法得到匹配对
TAij={(TA13,TA26),(TA24,TA513),(TA25,TA615),(TA38,TA512),(TA37,TA616),(TA411,TA514)}
通过改变感知因子和步长一次性地得到满足拼接要求的配对。在此过程中,对所有潜在的配对碎片都进行了比较分析,其结果在文物碎片修复中可指导碎片的拼接从而避免由于错误拼接导致的二次损坏。本文试验最终得到原器物正确重建结果,如图3所示。
4 结 语
本文提出了一种运用鱼群算法的文物碎片全局匹配方法。该方法以三维激光扫描仪获取碎片的点云数据,并进行特征要素提取。通过三维中心滤波圆弧拟合获取圆心与半径。依据特征要素,使用粗糙集理论,对碎片属性进行约简后分类。在分类的基础上,运用鱼群算法,对多特征要素进行不断寻优,从而一次性获得最终优化方案。该算法模拟了人工拼合碎片的思维,为实现智能化碎片匹配提供了思路。通过实例验证了本文方法的可行性,能有效避免单一特征匹配造成的缺陷,解决了存在碎片缺失或磨损情况下的匹配问题。
