基于SQUID三轴磁强计求取高精度磁总场研究
2019-03-28黎旭东邱隆清荣亮亮张树林王永良董丙元
黎旭东,邱隆清,荣亮亮,伍 俊,张树林,王永良,董丙元
(1.中国科学院上海微系统与信息技术研究所,信息功能材料国家重点实验室,上海 200050;2.中国科学院超导电子学卓越创新中心,上海 200050;3.中国科学院大学,北京 100049)
0 引言
三轴磁传感器件组成的矢量、梯度及张量系统在地磁导航、考古、未爆炸物检测等领域广泛应用[1-7],随着这些领域的发展,对获取高精度地磁场信息的需求也日益提高。三轴矢量磁传感器能获取磁场正交三分量信息,同时可用三分量数据求取地磁总场信息,较磁场标量探测器拥有更多测量信息。采用三轴矢量磁通门计进行总场合成,总场精度约达1 nT[4-5]。更精确的总场探测方案采用低温超导量子干涉器件(LTS-SQUID)[8]。Schöna、Schmelz等研制了一种级联结构的三轴磁强计[6],经算法校正后,求取的总场误差标准差达0.64 nT[7]。为获取更高精度的地球总场信息,以满足地球物理全张量探测系统应用需求,文中基于一款高灵敏度、低噪声的SQUID三轴磁强计与自适应遗传算法构建总场测量系统。完成了三轴非正交、灵敏度不一致和零点偏移等误差模型分析和总场误差分布情形的正演计算。针对工作在重置状态下的SQUID传感器零偏较大,不利于算法寻优的问题,提出了零偏预校正方法。基于自适应遗传算法,通过对正演结果抽样数据的反演仿真,预校正方法实现零偏初定位,大幅度降低了算法寻优复杂度。在预校正基础上,寻找到的校正参数与正演误差参数是一致的。实验结果验证了校正方法的可行性。
1 SQUID三轴磁强计总场误差模型及校正模型
结合SQUID传感器特性与文献[7,9-12]对三轴磁强计误差因素的分析,传感器制备、安装等工艺及信号调理电路等因素会导致SQUID三轴磁强计存在零偏、灵敏度不一致及坐标轴非正交等误差,可提出SQUID三轴磁强计的误差模型为:
(1)
式中:B′=[Bx′,By′,Bz′]T为SQUID三轴实测磁场分量;B=[Bx,By,Bz]T为理想磁场分量;K=diag[Kx,Ky,Kz]为各轴灵敏度校正系数;α,β,γ为坐标轴非正交角度。
由于SQUID三轴传感器的磁感应机理是测量磁通变化,在重置状态时,会产生无物理意义的零偏,且每次重置后零偏均偏离零点较大,文中令一次重置过程的三轴零偏分量为O=[Ox,Oy,Oz]T。
由式(1)可推导得出总场校正模型为
B″=SinvKinv(B′-O)
(2)
式中:Sinv、Kinv为S、K逆矩阵;B′=[Bx′,By′,Bz′]T为实测磁场三分量值;B″=[Bx″,By″,Bz″]T为校正后磁场三分量值,其求模之后获取理想磁场值。
2 算法介绍
传统遗传算法为随机搜索与优化算法,其虽有很好的全局搜索能力,但因参数设置非自适应,导致局部搜索能力差、未成熟收敛等问题。针对SQUID三轴总场误差算法校正多峰值、寻优维度高等情形,通过遗传算法交叉与变异概率的自适应调控可平衡算法全局与局部优化能力[13],算法流程如图1所示。

图1 算法流程图
图1中:fmax为种群的最大适应度;fave为种群的适应度平均值;k1、k2为[0,1]区间内固定值。遗传操作中,交叉算子决定算法全局寻优能力,变异算子决定局部搜索能力,因此交叉概率PC和变异概率FW的设置是决定算法收敛好坏的关键。
3 总场误差数值演算
3.1 误差模型正演计算
由矢量分解原理,可得理想总场的正交三轴分量为[14]:
Bx=Bsin(λ)cos(φ)
By=Bsin(λ)sin(φ)
Bz=Bcos(λ)
(3)
式中:0°≤φ≤360°;0°≤λ≤180°;B为理想磁场模值,特定φ、λ确定了一组理想磁场分量Bx、By、Bz。
将式(3)替换误差模型(1)中理想总场,结合总场计算公式[9],令理想磁场与磁场总场差为磁场误差,则磁场误差为:
(4)
式中:ΔB为磁场误差;HF为正演函数,约束为φ、λ取值范围;B为理想磁场被设为50 μT,方向不变;B′为带误差磁场;[α,β,γ,Ox,Oy,Oz]趋近于0;Kx,Ky,Kz趋近于1。
若令式(1)中9个未知参数为误差参数,现给定一组误差参数值[K;S;O]为[0.5°,0.5°,0.5°;1.1,1.1,1.1;0.4 μT,0.4 μT,0.4 μT],利用matlab于φ、λ取值空间中,以0.1°为间隔刻度网格化φ、λ取值,据式(4)计算总场误差随φ、λ分布如图2所示。

图2 总场误差分布
图2中,黑白变化表示正向误差到负向误差的过度,白色为正向误差,黑色为负向误差,给定的误差参数使得总场误差模值最大能达到35 μT。
3.2 校正模型反演仿真
随机从正演结果中挑选20个三分量数据点作为反演数据,如图3所示。根据校正模型式(2),选取目标函数为
(5)

就SQUID三轴零偏偏离程度大,不利于算法求解问题,提出零点偏移预校正方法,并在预校正的基础上再校正SQUID三轴的总场误差。
预校正:基于自适应遗传算法,在上界,下界[60 μT,60 μT,60 μT],下界[-60 μt,-60 μT,-60 μT]范围内,对随机选出的20个三轴数据点寻找一组Obegin=[Ox,Oy,Oz]T参数,使HS取最小值。预校正后,与理想总场相较总场误差峰峰值降低至0.23 μT,并实现了将零点偏移值初步定位到Obegin=[19 880.9 nT,20 044.2 nT,20 001.4 nT]T。
校正:在预校正所获取的零偏基础上,在上界[0.5°,0.5°,0.5°;1.1,1.1,1.1;0.4 μT,0.4 μT,0.4 μT],与下界[-0.5°,-0.5°,-0.5°;0.9,0.9,0.9;-0.4 μΤ,-0.4 μT,-0.4 μT],范围内,寻找一组[K;S;O]参数,使得HS取最小值,校正结果如图4所示。

图3 正演抽样数据
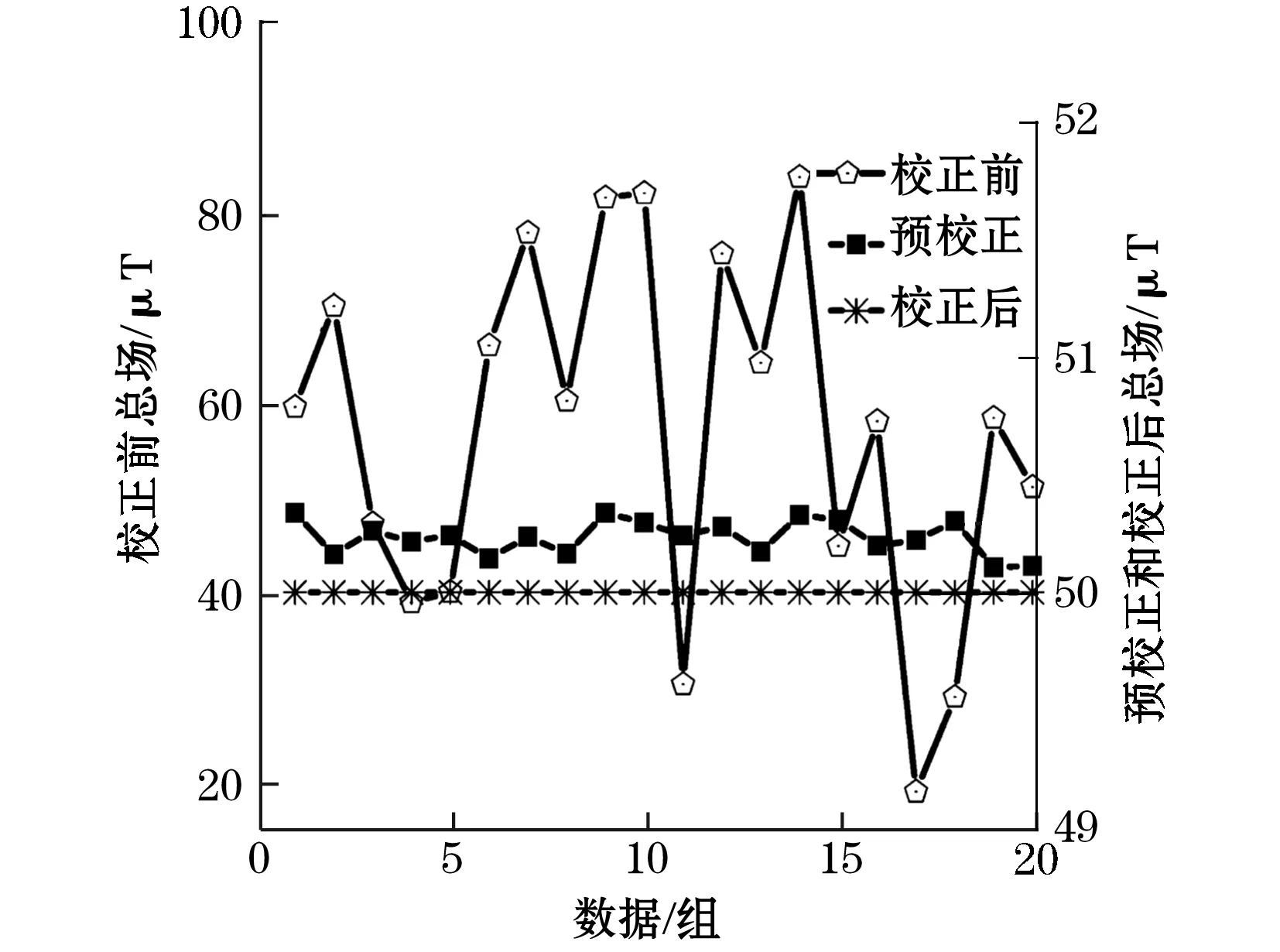
图4 校正前、预校正与校正后对比
在图4中,展现了校正前、预校正与校正后的结果对比,将校正总场与理想总场比较,校正后的总场误差峰峰值达0.02 nT量级。获取了如表1中的一组校正参数,参数中再校正的零偏为Onext=[199.07 nT,-44.225 13 nT,-1.379 6 nT]T,因此最终零偏校正参数为Ofinal=Obegin+Onext。比较校正参数与误差参数,可知Ofinal、校正后非正交角度与灵敏度系数等校正参数均和误差参数很相近,从而验证了预校正的可行性,整个校正方案的有效性。
为进一步研究总场误差分布,及校正方案的有效性,文中根据SQUID传感器实际参数情况,完成了几组典型误差参数的正反演验证,如表2所示。
表2中,随着误差参数增大,总场误差峰峰值亦随之增大,但经算法校正后均能将总场误差峰峰值稳定在0.02 nT量级,且寻找到的校正参数均与误差参数相近,再次验证校正方法的有效性。

表1 反演仿真结果

表2 几组典型的误差参数的正演、反演研究
4 实验验证
4.1 实验设备
本实验基于航空全张量磁梯度测量系统,系统主要由测控组件、SQUID读出电路、杜瓦及磁测组件,磁测组件主要有SQUID三轴磁强计、SQUID梯度计和光泵磁力仪。在航空探测系统中,SQUID三轴磁强计用于SQUID梯度计不平衡度补偿,也可用于磁总场求取。系统中的SQUID三轴传感器是M 050型低温超导高灵敏度三轴磁传感器,磁场噪声约为0.13 pT/Hz1/2,其磁场电压转换系数为0.498 μT/V。光泵磁力仪能够获取环境磁场标量值,精度可达0.01 nT以上,可给SQUID三轴磁强计求取的总场提供较理想参照。读出电路动态范围为±10 V,可允许高精度SQUID磁强计小范围的转动或摆动。
4.2 场地选取
为能获取较高质量的校正数据,应选取磁场均匀性好,附近无明显金属的环境。在即将进行实验的场地,我们用overhauser磁力仪组成的梯度计进行了测试,发现地面磁梯度随着高度增大逐渐变小,在2 m左右的位置达到0.2 nT/m以下。为获取更适合求取总场的SQUID三轴数据,我们的航空探测系统数据采集高度选在离地面2 m左右位置,以便提高校正精度。
4.3 数据采集
数据采集分为SQUID三轴数据采集与光泵数据采集两部分,且需时间同步,基于LabVIEW平台,建立了系统的人机交互界面,可实现系统调试与同步采集时间设置。航空探测系统采用了NI9251采集卡,模块噪声约0.1 μV。不同于磁通门计数据采集方案,因SQUID三轴工作于低温环境,且由于读出电路动态范围限制,系统中高灵敏度SQUID三轴磁强计不能大幅转动或摆动,所以倾斜与转动幅度不宜过大。
将系统悬挂离地面约2 m,并把光泵磁力仪固定于与系统相距约6 m的树干上。在人机交互界面上完成系统调试,确认身上无磁性物质并站于系统旁完成采集准备。开启SQUID三轴与光泵的同步采集,在不超量程前提下,缓慢转动系统,并尽量获取更多的三轴位置信息。文中采集了110 s数据,受采集电路动态范围限制,其转动或摆动角度均未超10°,SQUID三轴数据采样率为1 kHz,光泵磁力仪采样率为10 Hz。
4.4 实验数据处理及结果分析
将SQUID三轴数据的采样率降低到10 Hz,与光泵相对应。根据反演计算分析,以式(5)作为目标函数,并选取光泵测量值作为SQUID三轴的理想总场参照,对110 s数据进行零点偏移预校正后,将SQUID三轴总场误差的峰峰值从3.3 μT降至0.158 μT,同时获取了零点偏移初值为Obegin=[23528 nT,20 652 nT,-36 814 nT]T。基于预校正结果,将SQUID三轴数据分为两段,同时对两分段及整段数据进行校正,校正参数如表3所示。

表3 实验数据处理结果
由表3可知,经算法校正后,两段分段数据的校正总场与光泵误差的标准差均能到0.2 nT以下量级,且两组校正参数比较相近,此可初步验证校正参数的稳定性。整段校正结果如图5、图6所示。

图5 校正前三轴实验数据

图6 校正后与光泵比较
图6中SQUID三轴磁强计的校正总场曲线能很好的跟随光泵变化,与光泵的误差标准差也能达0.2 nT量级。为进一步研究校正参数稳定性,将第一段的校正参数应用于第二段数据,其校正后标准差为0.104 nT,且第二段的校正参数应用到第一段时,其标准差为0.181 2 nT,再次验证了参数的稳定性。
5 结论
对高灵敏SQUID三轴磁强计进行校正是三分量磁测量工作的必要基础,本文为超导全张量系统提供了先预校正磁场分量的零偏,于零偏校正基础上再校正磁场分量的非正交、灵敏度不一致及零偏误差获取高精度总场的方案。根据正演、反演结果可知,虽然总场误差会随着误差参数的增大而急剧增加,但是经自适应遗传算法校正后总场误差的峰峰值均能稳定在0.02 nT量级,其中零偏预校正方法可对零偏作快速初步定位。在实验验证中,预校正操作使总场误差峰峰值由3.3 μT降至0.158 μT,最终校正后的总场曲线与光泵拟合的很好,其标准差达0.2 nT以下。为验证校正参数稳定性,数据分两段进行校正,均能获得总场误差标准差达0.2 nT以下结果,且校正参数相似度高,将两组校正参数交换校正两段数据,也能达到相同量级结果,进一步验证了参数的稳定性。
采集过程中,因电路的动态范围不能满足系统大幅度旋转或摆动的情形,导致SQUID磁强计高灵敏度优势被限制,下阶段拟开展磁通量子计数读出电路研制,扩展系统动态范围,实现系统全方位转动。