天文大地测量的发展现状和展望
2019-03-25时春霖袁晓波李崇辉陈长远袁明泽
时春霖,张 超,袁晓波,李崇辉 ,陈长远,叶 凯,秦 炜,袁明泽
(1.信息工程大学,河南 郑州 450001;2.中国人民解放军61206部队,北京 100042;3.中国天绘卫星中心,北京 102012; 4.中国人民解放军91937部队,浙江 舟山 316000)
天文大地测量(Astronomical Geodetic Measurement)是通过观测恒星位置以确定地面点的天文经纬度,或者确定两点间天文方位角的测量工作[1-4]。它是一种隐蔽、可靠的定位定向手段,具有不受电磁干扰,自主工作,被动探测的特点,并且在所有测量中其定向精度较高,定位精度仅次于卫星定位。因此无论是在大地网起始点、边的数据测定,还是在国防建设和科技领域中,天文大地测量都有着不可替代的作用。
科学技术的发展带来测量设备的革新,带动了天文大地测量的发展。天文大地测量观测设备包括测量仪器、守时仪器和计时仪器[1]。传统的天文大地测量使用光学仪器T3、T4等作为测量仪器,采用无线收时器收录时号,使用石英钟作为授时工具,全程利用人工测量。电子技术、激光技术、数据记录处理技术以及卫星定位技术的发展,使得天文大地测量朝着小型化、半自动化迈出了重要一步。其中,电子经纬仪已由单纯的电子测角功能,发展为具有自动测距、自动测角、自动存储输出测量数据、自动识别目标等功能的自动跟踪照准全站仪[5],可较大程度减少人力观测,卫星导航定位系统也可为天文大地测量提供高精确的自动授时服务。而CCD的出现则为天文大地测量自动化和智能化提供了可能。从 1970 年美国Bell实验室成功研制第一个电荷耦合器件以来,CCD 技术便得到迅速发展,尤其在天文大地定位的应用上。利用装有 CCD 芯片的测量设备可以在短时间内获得目标的星空恒星图像信息,采用数字摄影测量方法在计算机上对恒星影像直接进行自动处理,通过数据解算和转换,便能获得恒星位置,从而实现快速定位[6]。
随着测绘仪器和科技水平不断发展,天文大地测量正在逐渐摆脱人的束缚,从费时费力的人工模式不断朝着小型化、简易化、快速化、自动化、智能化发展。
1 传统的天文测量
传统的天文大地测量往往通过接收天文台发布的时号来确定时刻,用计时器记录时刻[4],观测中使用WILD T4全能经纬仪或60°等高仪。其中,WILD T4全能经纬仪(以下简称T4)由瑞士威特公司生产,是我国20世纪50年代以来一、二等天文大地测量中的常用仪器,它主要由望远镜、目镜接触测微器、水准器、轴系、度盘及读数设备、电源及照明设备和附件组成[7],如图1所示。
在利用T4进行野外天文作业中,常采用太尔各特法测定一等天文纬度,采用东西星等高法(金格尔法)测定钟差,进而测定一等天文经度[2],并采用北极星任意时角法测定天文方位角;或利用60°等高仪(由T3加上60°棱镜等组成),采用多星等高法同时测定二、三、四等以及等外天文经纬度[4]。传统的天文测量,借助光学测量仪器高精度的特性,可以获得较为精确的观测数据,为早期国家构建天文大地网,进行国防军事建设发挥了重要作用。到了20 世纪 80 年代,在全国天文大地网整体平差后,通过对大地天文测量实测结果统计结果进行分析,得到一等天文点纬度、经度、方位角的中误差均方值分别为±0.19″、±0.189″、±0.29″,二等天文点纬度、经度、方位角的中误差均方值分别为±0.29″、±0.385″、±0.46″[2]。
然而,传统的天文大地测量存在诸多局限,如:在传统天文大地测量中都是人工寻找待测恒星,耗时较长,相邻2颗待测恒星观测时间间隔应大于3 min[4]。此外,在观测过程中,时常会出现星位分布很好,但因时间相距较近而要舍去一颗恒星的情况,这势必要再等待较近位置下一颗恒星,导致整个测量效率下降。不仅如此,传统的测量仪器过于庞大笨重,不易携带;设备操作复杂,观测的准备和程序多而杂;观测操作技术要求高,需要测量人员进行专业的技术培训,尤其是收时、读表的操作,观测员劳动大,需要全程用人眼寻星和观测目标;计算工作量大,数据记录和解算完全需要人工完成。尽管该仪器设计精密,测量精度高,但是因为其测量效率低下,WILD T4全能经纬仪在20世纪已停产,我国一直使用其进行天文大地测量至本世纪初,近年已基本停止使用[7-8]。在现代天文大地测量中,T4逐渐被其他仪器所取代。
2 基于电子经纬仪的天文大地测量
智能计算机和全站仪等测量仪器在天文大地测量中的广泛应用,从根本上改善了传统天文大地测量的不足,使得天文大地测量快速化、简易化成为了可能。如图2所示,基于电子经纬仪开发的天文大地测量系统Y/JGT-01具备了小型化、快速化、半自动化的现代测量需求特点,相较于传统天文大地测量大大地提高了作业效率[4]。在Y/JGT-01系统中,得益于卫星定位技术,使用了卫星计时器代替以往的计时器进行更精准的授时;采用计算机进行数据记录和数据解算,测量解算结果更加容易获得。并且采用了先进的徕卡系列全站仪及自动寻星软件,使得在待测星即将到来时,计算机驱动仪器将望远镜自动指向待测星的预计到达位置,大大减少人眼观测的时间。且在测量中仅要求相邻2颗观测恒星的时间间隔大于30 s即可,放宽了对恒星选择的要求,极大地方便了观测,提高了效率。根据全站仪特点采用多星近似等高法,每颗星可采几到十几个数据(操作规定中定为10次),观测灵活,观测条件较以前大为放宽,观测数据量增加十倍以上,并在数据解算时,可以将电子经纬仪的指标差等误差及大气折射改正的残余项一并解出[4]。实际作业证明,其测量定位结果完全满足野外一等天文测量精度要求。目前已有基于徕卡TS30系列智能测量机器人的天文测量系统及其应用研究[9]。

图2 Y/JGT-01系统
在新型天文测量系统Y/JGT-01中,授时由卫星完成,测量天文经纬度采用多星近似等高法。如式(1)所示:
cosz=sinφsinδ+cosφcosδcost.
(1)
其中,z为测站天顶距,φ为测站天文纬度,λ为天文经度,α为恒星的赤经,δ为赤纬,t为时角,且t=S-α+λ,S为观测瞬间的格林尼治真恒星时,由观测瞬间的UTC时刻换算得到。
采用北极星多次时角法测量方位角。设测站测得某地面目标的水平度盘读数为R和恒星M在钟面时S′ 瞬间的水平度盘读数R′ ,对应瞬间恒星的方位角为A,则北极P方向的水平度盘读数为
N=R′-A,
地面目标方位角为
a=R-M=R-(R'-A).
式中的A可由下式计算:
(2)
其中,多星近似等高法是利用高精度电子经纬仪、卫星计时器等,观测近似等高,即用电子经纬仪在等高圈上下小幅度地跟踪选定恒星进行多次测量。最后对从电子经纬仪传输回来的观测数据进行处理,进行大气折射、仪器误差、恒星视位置计算、地极移动、UTC转化UT1等各项改正。对改正后的数据进行近似等高平差计算,解出天文经纬度以及天文方位角,并给出其精度[4]。文献[4]给出了其具体的相关数据和精度。其中,内符合精度如表1所示,外符合精度如表2所示,大地天文测量精度要求如表3所示。数据显示基于电子经纬仪的天文大地测量可以满足一等天文测量精度需要[4]。

表1 内符合精度

表2 外符合精度
特别值得注意的是:全站仪进行测量的关键是获得目标恒星的度盘观测值。无论TPS1000、T3000系列电子经纬仪还是目前TS系列测量机器人,在利用全站仪平台进行测量时,数据解算全部依赖于全站仪的观测数据,即度盘上水平角和高度角的读数,所有计算都需要观测值参与计算,它对解算天文经纬度起决定性作用。相较于传统天文测量,新系统大大提高了作业效率,但是在测量星点位置坐标时依旧需要人眼进行瞄准观测星点,记录度盘读数,天文定位结果受到人眼识别及操作和仪器误差影响,作业效率仍有待进一步提高。

表3 野外天文测量精度指标
3 基于CCD技术的自动天文大地测量
实现天文大地定位测量仪器的自动化观测,进一步提高天文大地测量作业效率,特别是消除传统天文大地测量人仪差影响的全自动测量,是现代天文大地测量发展的方向[10]。目前,天文大地测量正在以CCD数字摄影技术为依托,以不断深入开发的测绘仪器为平台向自动化、智能化发展。其定位基本原理是通过CCD相机获取恒星的数字影像,通过数字化可将恒星影像转换为数字信息,利用数字图像处理技术,对恒星数字影像进行坐标测量和数学处理,再加上配有高精度守时记时设备及相关恒星星表,最终获得测站点的天文经纬度[6]。整个观测过程使用CCD的客观记录来代替人眼的主观观测,不仅克服了人仪差影响,而且进一步提高了作业效率。
3.1 人仪差
为进一步提高天文大地测量作业效率、实现天文大地定位测量仪器的自动化观测,就必须要消除天文大地测量中的人仪差影响[10]。人仪差是由观测者生理和心理作用产生的系统操作误差[11-12]。只要在实际作业中使用人眼,测量结果便无法避免人仪差影响,它的实质是人和仪器本身对天文经度的测量精度影响。
目前解决人仪差问题的主要方法是标校法。测量规范要求:天文测量前后分别在天文基本点上进行一、二等天文经度测量。其中,在对一、二等点测量人仪差和经度时,必须同一人使用同一方法、同一仪器施测[11-14]。相邻两次人仪差的变动,分别不得超过 0.06 s和 0.08 s[11-14],且标定的相隔时间不得超过 12个月。目前人仪差标定是在北京市区的某天文台内的天文墩上进行的,测量作业员每次在外出作业前和归来后,都需要到北京进行人仪差测定。其标校原理如下:
设天文基本点的已知经度值为λ,某观测员的测量经度为λ′,则其人仪差为:
dλ=λ-λ′.
(3)
若采用测前和测后人仪差的平均值,即:
(4)
需要指出的是,测前测后人仪差的标定,其作业量均相当于一次单点天文观测。因此,一个天文作业流程相当于3次在天文点进行观测,并且天文墩数量有限,越来越多的观测墩已经年久失修,再加上天气等因素的制约,将大大的延长天文作业周期。
3.2 星图处理技术
CCD测量模式决定了自动天文大地测量不仅在观测中节省人力,还消除了人眼观测对作业结果的影响。通过CCD技术实现自动天文测量关键是对拍摄星图进行图像处理,获得星点像素坐标,实现星点提取和星图匹配。如图3所示,传统的星图处理过程一般分为星图预处理、星点目标识别与提取、星点质心定位、星图识别[15-18]等步骤,最终获取星点像素坐标。

图3 星图处理的流程
星图的预处理包括星图的灰度化和去噪。图像灰度化是指将拍摄图像转换为8位灰度图的过程;图像去噪的目的是为了在进行正式的图像处理时,获得良好的图像处理效果,以减少CCD在成像带入噪声对图像的污染和干扰影响。去噪的方法一般采用滤波,主要包括中值滤波、均值滤波、高斯滤波、小波变换等。
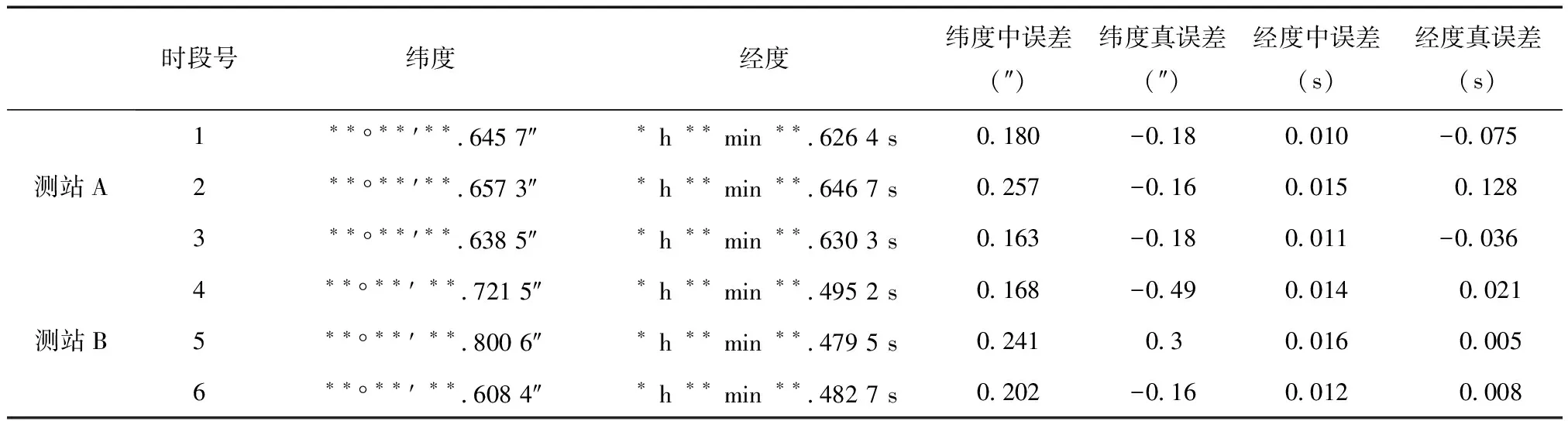
图像阈值分割就是利用前景和背景之间灰度的特征和差异,通过选择合理的阈值,确定图形中每个像素点属于前景还是属于背景,最后得到处理后的二值化图像。假设原灰度图灰度为f(x,y),以一定的约束条件和准则得到阈值T(0 (5) 常用的阈值分割算法分为全局阈值法和局部阈值法,算法主要包括:迭代法、Otsu算法、Bersen算法、Nblack算法、一维最大熵法等。分割性能与目标大小、目标和背景的灰度对比度、方差和噪声等因素有关,目前尚没有一种适合于所有图像的通用的分割算法[18-19],具体的图像需要具体的阈值分割算法进行处理。 阈值分割是分割前景与背景的关键一步,而星点提取是为了使前景中区分不同的目标。实际拍摄的星图经过滤波和阈值化处理后,过滤掉背景和绝大多数的噪声,星图中只剩下一些孤立的星点,其余部分的灰度值皆为0。为了区分不同的星点,星图中星点的提取一般釆用连通域标记法,包括四连通域法和八连通域法。 CCD 最小分辨率为一个像素,因而质心坐标的精度受到像素分辨率的制约。为了突破 CCD 分辨率对测量精度的限制,在现实使用中一般采用亚像元细分方法实现亚像素级的定位精度[17]。常用的计算星点中心亚像素算法主要是质心法和拟合法,质心法包括传统质心法、带阈值质心法和平方加权质心法,拟合法主要有椭圆拟合法和高斯曲面拟合法。其中,传统质心法由于算法简单、实现容易、适应性强而被广泛应用,其计算公式如下: (6) (x0,y0)为目标质心像素坐标,I(x,y)为目标在灰度图像上(x,y)处的灰度值。 星图识别作为星图处理的重要一环,一般利用星点间的角距关系等进行识别,目的是为了确定观测星图中的星点与实际恒星间的对应关系[14]。其主要算法分为两类:一是利用恒星星等和恒星间的几何关系完成星图匹配和识别,代表算法有三角形识别算法、圆形区域法、栅格算法等;另外一个是借助遗传算法和神经遗传算法等构建新的变量,实现星图匹配,如P向量法、基于蚁群聚类算法的星图识别方法、改进的HD距离的星图识别算法等。 星点坐标的获得为实现自动天文大地测量提供了数据基础。 3.3.1 基于数字天顶仪的自动测量 目前的天顶仪经历了模拟天顶摄影仪、数字天顶仪的发展。它主要通过观测天顶附近恒星的视运动获得测点的天文经纬度, 结合 GPS 的大地经纬度测量结果, 快速获取垂线偏差[20]。其中,相较于人眼观测,模拟天顶摄影仪使用相机及其底片代替人眼观测,较大程度上提高了观测效率和自动化水平。随着数字摄影技术发展,由于其具备曝光历元的记录和水平读数的全自动化, 且只在计算机上直接处理恒星影像,而无需对像片进行冲洗和测量等诸多优点,数字天顶仪逐渐取代了原有的模拟天顶摄影仪,使得天文大地观测实现自动化,进一步提高了天文大地观测效率和精度。 利用装有CCD芯片的天顶摄影仪获得天顶天区恒星图像[10],通过对图像进行处理,自动获得恒星位置,进行快速精确亚像素定位,这在天文大地测量中具有重要的应用价值。德国 汉诺威大学(University of Hannover)自上世纪 80 年代已经开始研究天顶仪,但由于当时技术水平不够的原因,模拟数字天顶仪自动化程度非常低,精度最高为 0.5″左右[21]。随着CCD的广泛应用,先后有慕尼黑大学等多所研究机构开始研究数字天顶仪技术,但精度普遍不高,多在1″~2″[21]。直到 2004 年左右,德国汉诺威大学在原模拟天顶摄影仪TZK2 和 TZK3基础上研制了数字天顶仪,使精度可达0.1″~0.3″[22],后来与瑞士苏黎世理工大学(ETH Zurich) 大地测量学和地球动力学实验室(GGL,Geodesy and Geodynamics Laboratory) 合作研制了另一套更高自动化的数字天顶仪系统,用 CCD 传感器代替摄影底片, 分别研制了数字式天顶相机系统 TZK2-D 和 DIADEM[23]。目前以这两所研究机构对数字天顶仪的研究最为全面和成熟[24-27]。奥地利维也纳技术大学也研制了小型的 CCD 天顶相机系统 ZCG1[28]。其在欧洲和美洲的许多发达国家被用于局部和区域大地水准面确定和其他地球物理学研究[29], 但是造价昂贵。而国内对数字天顶仪的研究也已经开始,最好精度已经优于0.5″[30-31]。 以数字化天顶望远镜样机DZT-1为例,图4(a)和图4(b)分别给出了在某测量点测量时经纬度的标准差[32]。 数字天顶仪是由光学望远镜、CCD图像传感器、GPS 接收机、调平系统 、控制系统和数据处理系统等构成。其基本流程为:利用集成的GPS获得大地坐标和精确时间[10,33],通过对CCD拍照技术获取的天顶恒星影像进行处理,获得相应的CCD坐标,运用星表对所得恒星进行匹配,实现恒星识别并根据天文大地测量原理和坐标转换得到高精度的垂线偏差,对测站点进行天文定位。图5显示了天顶仪作业示意图,具体原理如下: 图4 DZT-1测量结果 设某一测站天顶恒星的天文经纬度为(φ,λ),与其天顶赤道坐标(δ,α)之间关系为: (7) 其中,φ为天文纬度,GAST为格林尼治视恒星时(Greenwich apparent sidereal time),δ为赤纬,α为赤经。大地坐标和格林尼治视恒星时可以通过GPS和历元转换获得,只要获得(δ,α),便可以求得天文经纬度和垂线偏差。由于在测站天顶恒星场中很少有恰好经过天顶的恒星,且测站天顶点没有相应恒星标识,因此,天顶方向只能由CCD成像的天顶恒星通过内插得到[18]。 图5 天顶仪作业示意图 数字天顶仪全程利用GPS和CCD进行数据获取和解算,无需人眼测量作业,解决了观测中的人的误差问题。然而,数字天顶仪仪器较沉重,携带不便,小型化装备困难,并且天顶仪视场角较小,也不具备定向功能,测量中过天顶的恒星十分有限,观测条件存在较大局限。 3.3.2 基于视频机器人的自动测量 在原有Y/JGT-01系统的基础上,使用带有CCD功能的视频测量机器人代替以往的传统全站仪,也可以实现自动天文大地测量。徕卡TS50i系列智能视频测量机器人(以下简称TS50i),拥有先进的专业级精密测量镜头,首次加入了具备视频拍照测量的广角相机和长焦相机,相机关系固定,成像稳定。利用客观的TS50i视频测量功能代替人眼主观观测避免了观测过程中人眼持续瞄准测量,消除了人眼观测影响,为实现自动天文测量提供了平台和基础,较于传统的全站仪的作业模式进一步提高了工作效率,使得基于全站仪模式的天文测量逐渐自动化、智能化。实验数据表明,其自动测量精度优于0.3″,可以满足野外一等天文测量。表4给出了其中两个天文点6个时段的具体测量结果。 图6对比了原有的Y/JGT-01系统和自动测量系统测量定位的流程图,其中虚线框显示了使用视频测量机器人进行CCD视频观测的流程。与传统作业流程相比,基于该平台的自动天文测量优点如下: 1)在测量步骤上,省略了测定前后人仪差标定,整个作业时间节约了60%以上。采用自动天文测量模式可由当前的测前人仪差测量→天文测量→测后人仪差测量模式,改为直接进行天文大地测量,使得整个作业量与作业时间减少近2/3。 2)在测量过程中,由CCD视频观测代替人眼瞄准,测量时间减少50%。用人眼不断调整十字丝观测平均每颗星需要30 s,利用CCD观测每颗星用时约15 s,这样使得平均每颗星观测时间节约1/2。 利用视频测量机器人实现自动天文大地测量的重要一步是,将十字丝度盘值(A,B)转化到当前时刻星点目标度盘读数(A′,B′)。实现度盘值转化的关键是实现像素差值和度盘差值的转换,如图7所示。利用十字丝中心像素坐标(X,Y)→星点目标像素坐标(X′,Y′)的转化,完成十字丝度盘值(A,B)→星点目标度盘读数(A′,B′)的转化,而后仅需要坐标转化和数据解算处理即可获得天文测量结果。 表4 野外实测结果 图6 天文测量流程 图7 坐标转换的流程 值得注意的是,与数字天顶仪CCD处理图像与作业模式不同,全站仪测量的每颗恒星都是已知的,无需进行星图匹配,而仅需获得星点像素坐标。但是由于此系列仪器设备较新,目前基于该平台的自动天文测量正在推广普及阶段。并且相较于数字天顶仪,其转换模型仍需进一步精进,测量精度有待进一步提高。 观测技术不断发展,观测手段也随之日趋多样化。本文总结了已经实现装备化、技术较为成熟的天文测量技术。基于不同平台的天文大地测量模式各有优劣,表5给出了基于各种测量平台特点的比较。 表5 几种天文测量模式的比较 天文大地测量正在从人工测量逐渐向着小型化、快速化、简易化、自动化、智能化发展。目前,将 CCD数字摄影技术应用于天文大地测量,是国内外在天文定位方面的发展趋势。越来越多的新型天文测量形式正在对基于CCD拍摄的天文测量模式进行有益的探索,如利用鱼眼相机进行天文定位等。未来CCD性能将进一步改善,结构更简单,感光芯片将拥有更多像素数,感光面积将更大,敏感度更高,噪声进一步降低,成像质量进一步增强,这将使得基于CCD功能的天文大地测量精度进一步提高,作业更加智能化,使用更加方便,适用范围更广,装备化更容易实现。不仅如此,为了适应飞速发展的国防军事综合需求,诸如红外测量等更多的新型测量手段也将被开发研制应用到未来的天文作业中,使得未来的天文大地测量可以摆脱黑夜的条件限制,逐步向着全天时测量发展。
3.3 CCD天文大地测量





4 总结与展望

