用于三维测量的快速相位解包裹算法
2019-03-23伏燕军黄春志史耀群
王 霖,韩 旭,伏燕军,黄春志,史耀群
(1. 南昌航空大学 无损检测技术教育部重点实验室,江西 南昌 330063;2. 南昌航空大学 测试与光电工程学院,江西 南昌 330063)
引言
条纹投影三维测量方法,又称条纹投影轮廓术(FPP),具有非接触、低成本、高精度和高效率的优点,因此被广泛应用在三维测量中[1-4]。通过投影仪将条纹投影到被测物体表面,条纹由于受物体高度的调制发生变形。相机采集变形的条纹图像,然后通过计算机对其进行处理,解调出物体高度的相位信息,再结合系统标定参数获得物体的三维高度信息[1-2]。数字条纹投影的关键技术之一,是对变形的条纹图像进行相位解包裹(又称为相位展开),即将分布在(-π, π]区间的包裹相位展开为绝对相位[5]。经过几十年的发展,学者们提出了很多成熟的相位解包裹算法,可分为两大类:空间相位解包裹算法和时间相位解包裹算法。
最小二乘法[6]、枝切法[7-8]、质量图引导法[9-10]等经典的空间相位解包裹算法[11]与周围像素点的相位值紧密相关,相位展开过程中,相位容易产生误差传递。因此,空间相位解包裹算法仍有缺陷。
时间相位解包裹算法是在时间轴上进行相位展开,与包裹相位的相位值无关,不会出现误差传递。但是这种方法的条纹级次是由额外获得的条纹图像求得的,增加了图片数量,降低了测量速度。如果投影的正弦相移(N步)条纹图有T个周期,则二进制编码方法[12-13]和格雷码方法[14-16]均需要投影N+log2T幅条纹图。为了减少条纹图的数量,提高测量效率,学者们提出了另外两种时间相位解包裹算法:双频外差方法[17-18]和相位编码方法[18],这两种方法均需要投影2N幅条纹图[19-20]。
尽管时间相位解包裹算法取得很多进展,但所需投影的条纹图不少于2N幅,数量依然较多,而且都需要额外的条纹图来求条纹级次。我们自然想到,如果不用额外的条纹图,只用相移图求包裹相位和条纹级次,这样就可以进一步减少图片数量。在保证相同测量精度的条件下,且不用额外的条纹图求解条纹级次,本文提出一种用于三维测量的快速相位解包裹算法。首先,利用标准相移算法求得包裹相位和消除背景的掩膜;然后,直接利用包裹相位和掩膜,根据连通域标记算法计算出条纹级次,进而展开包裹相位求得绝对相位。该方法只需N(N≥3)幅正弦相移条纹图,数量比上述所提时间相位解包裹算法少,数据处理速度快,可应用于快速测量领域。
1 测量原理
首先,通过投影仪将计算机所生成的正弦相移条纹图依次投影到被测物体表面,相机在另一方向拍摄被测物体表面形貌调制的变形条纹图。然后,用本文所提出的方法对变形条纹图进行计算,得到每个像素点对应的相位,求得被测物体的绝对相位。最后根据预先系统标定得到的相位高度关系,最终获得物体的三维高度信息。本文方法的测量原理如图1所示。

图1 测量原理图Fig.1 Schematic of measurement
1.1 复合计算框架
图2描述了本文提出的计算框架的示意图。本文方法共使用N步相移正弦条纹图(I1~IN)进行绝对相位计算。
第1步,用相移算法计算包裹相位,具体过程在1.2节中详细解释;第2步,计算条纹图数据调制度,制作掩膜,具体细节在1.3节中详细解释;第3步,计算条纹级次,通过对包裹相位进行正反两次二值化处理,然后分别与掩膜卷积,并对其进行连通域标记,最后合并标记值得到准确的条纹级次,具体过程将会在1.4节中详细解释;最后,通过1.5节中的(13)式计算绝对相位。在后续小节,我们将逐步详细阐述细节。

图2 绝对相位的复合计算框架Fig.2 Composite computational framework for absolute phase
1.2 计算包裹相位
用投影仪将计算机所生成的N步相移正弦条纹图依次投影到被测物体表面,对每幅投影图像用相机进行采集,获得被待测物体调制后的条纹图,其光强分布如下:
Ik(x,y)=A(x,y)+B(x,y)cos[φ(x,y)+δk]
(1)
式中:Ik(x,y)为相机采集的正弦条纹图中像素坐标为(x,y)的光强;A(x,y)为平均强度;B(x,y)为强度调制;φ(x,y)为待求物体包裹相位;δk=2kπ/N,(k=1,2,3,…,N)为相移大小。
对采集到的正弦条纹图使用N步相移算法计算出包裹相位,求解方法如(2)式所示:
(2)
包裹相位是由反正切函数计算得到的,所以它被截断在(-π, π],具有2π相位跳变点。需要用相位解包裹算法去除2π不连续点以求得绝对相位。
1.3 计算掩膜
为了提高三维测量的效率与准确性,减少相位解包裹时的计算量和出错率,我们要分割物体相位区域,计算掩膜(Mask)图像。先由以下公式计算出平均强度和强度调制:
(3)
(4)
进一步,可以计算得到数据调制度γ(x,y):
(5)
数据调制度γ(x,y)表示每个像素点的条纹质量,1.0表示质量最好,此信息通常用于确定图像的背景,通过分割数据调制度以获得Mask,用Imask(x,y)表示。
1.4 计算条纹级次
由(2)式计算得到的包裹相位分布在(-π, π]。首先,我们对包裹相位分别按(6)式和(7)式进行正反两次二值化处理,得到两个相反的二值化结果φP(x,y)和φN(x,y):
(6)
(7)

(8)

(9)
(10)
(11)
得到这两个初始标记值,就可以利用(12)式将这两个值逐像素对应相加合并,计算得到完整的条纹级次。
K(x,y)=Kright(x,y)+Kleft(x,y)
(12)
1.5 计算绝对相位
一旦求得条纹级次K,就可以通过(13)式计算得到物体的绝对相位Φ(x,y)。
Φ(x,y)=φ(x,y)+2π+K(x,y)
(13)
2 计算机仿真

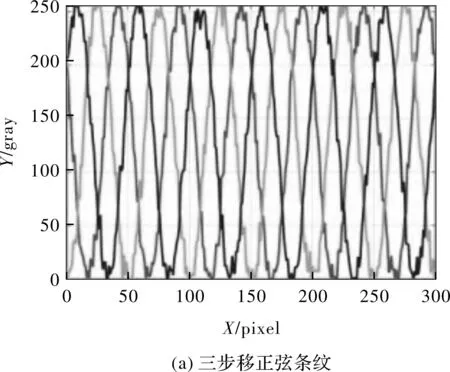
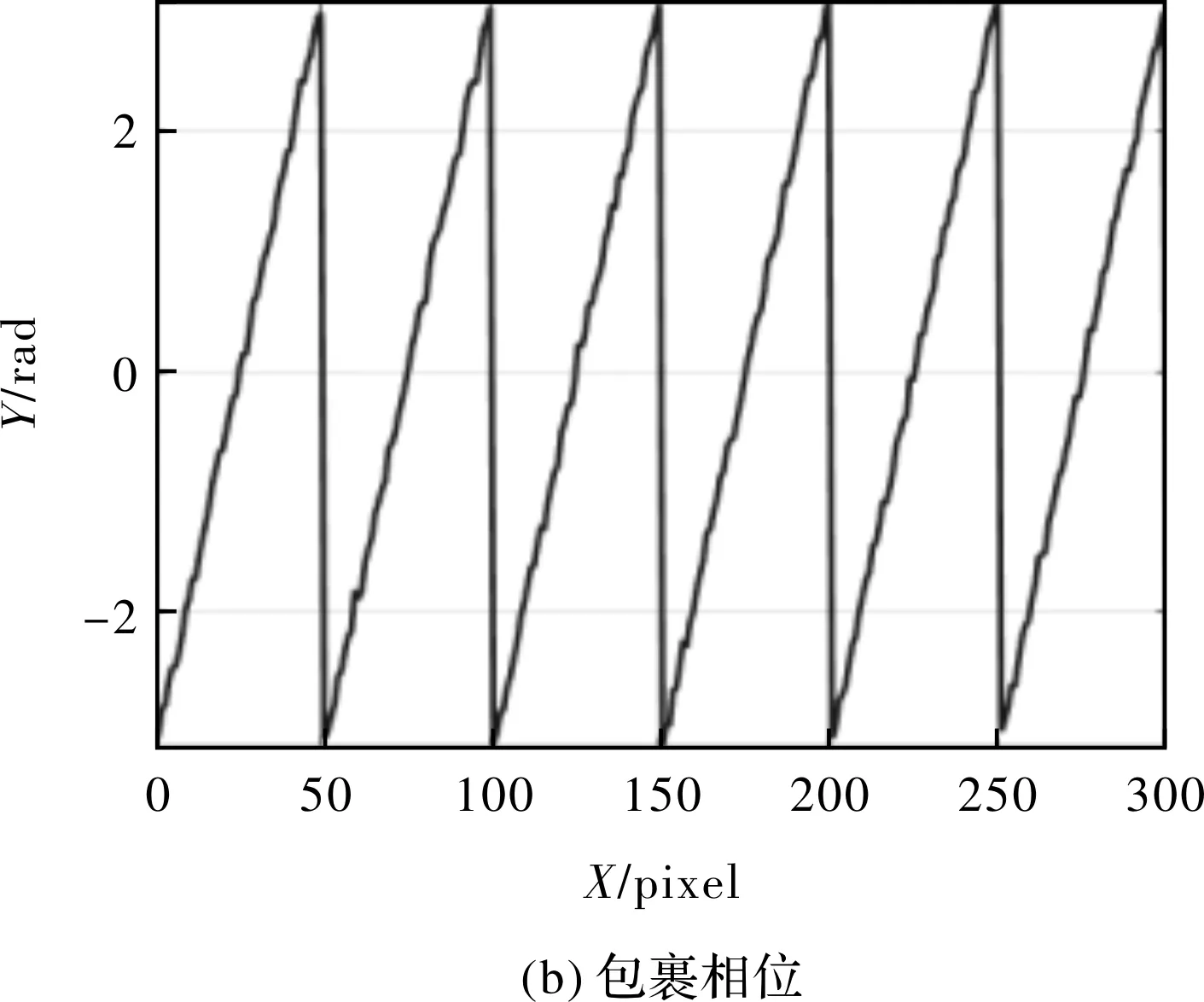
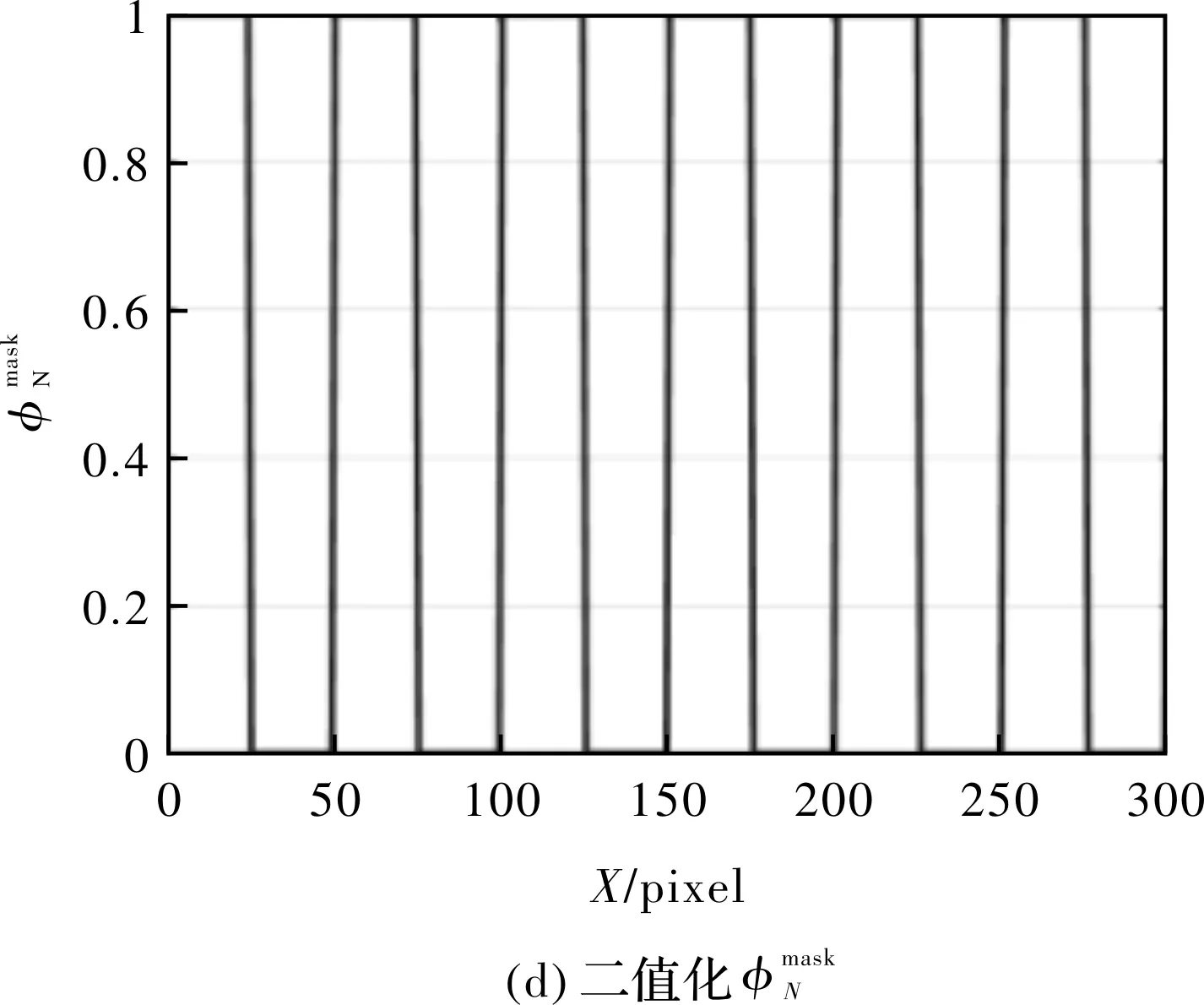
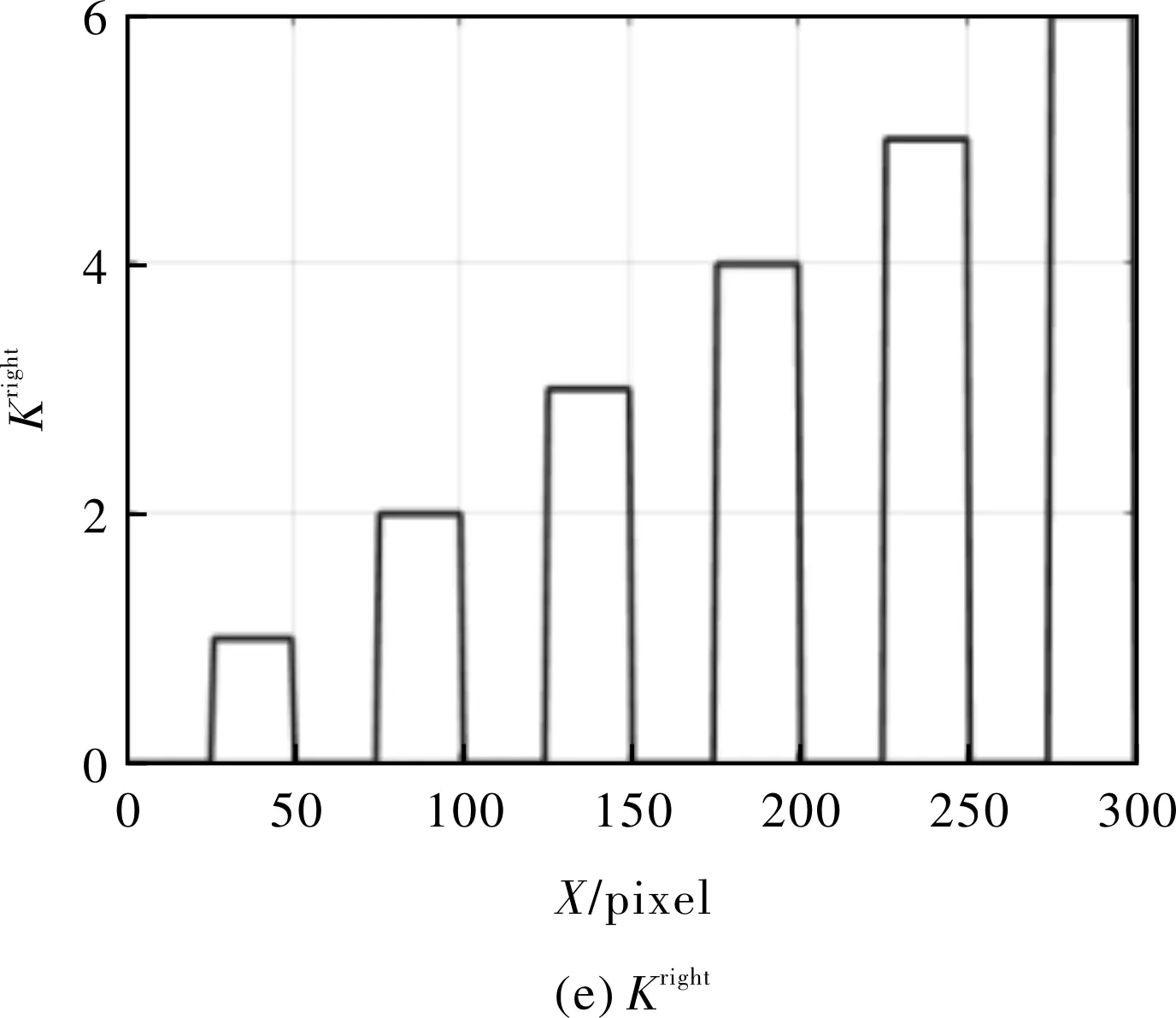

图3 仿真过程Fig.3 Simulation process
仿真结果如图4所示,图4(a)是计算求得的条纹级次;图4(b)是最终求得的绝对相位。由仿真结果可知,该方法在正弦条纹图存在一定噪声的情况下也能有效求解条纹级次,从而计算出准确的绝对相位。


图4 仿真结果Fig.4 Simulation results
3 实验结果与分析
为了验证本文所提出的相位解包裹算法,首先搭建了三维测量系统,并对此系统进行标定,建立绝对相位和高度数据间的关系。所搭建的测量系统由计算机、相机和投影仪组成,如图5所示。计算机用于控制整个实验中的投影仪、相机、显示器等。投影仪选用型号为Texas Instruments LightCrafter 4500 的DLP(digital light processing)数字投影仪,内含数字微镜装置DMD,可实现红、绿、蓝三颜色的单通道投影,分辨率为1 140×912像素。相机选用型号为acA1600-20gm GigE的德国Basler工业CMOS相机,搭载焦距为8 mm的镜头,分辨率为1 280×1 024像素。正弦条纹图是由计算机生成1 120×912像素大小,条纹周期为35个像素的8位灰度图。
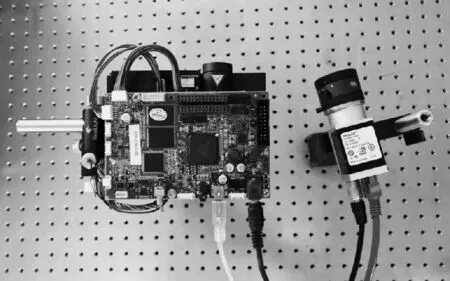
图5 三维测量系统Fig.5 Three-dimensional measurement system
首先,测量一个模型。在实验中,我们取相移步数N为3。利用投影仪将计算机生成的三步相移正弦条纹图依次投影到被测模型表面,相机依次采集被模型调制后的条纹图像。其中:图6(a)~(c)是模型的三步相移正弦条纹图;图6(d)是所测量模型的二维图像;根据三步相移正弦条纹图可计算出包裹相位和Mask,分别如图6(e)、6(f)所示。


图6 模型测量过程Fig.6 Model measurement process
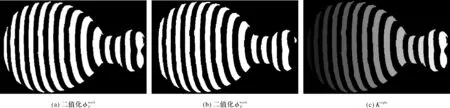

图7 模型测量结果Fig.7 Model measurement results
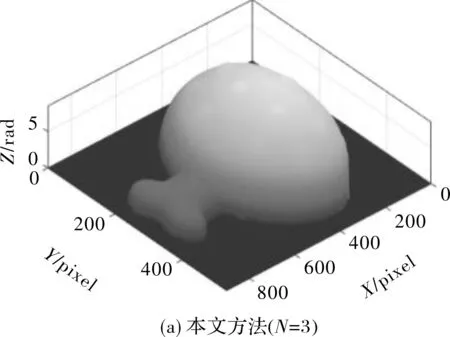
图8(a)是模型最终的三维重建结果。为了与其他方法进行比较,我们用格雷法[13-15]和相位编码方法[18]分别对模型进行了测量。图8(b)是格雷法的三维重建结果,图8(c)是相位编码方法的三维重建结果,这两种方法的测量结果与本文方法的测量结果基本一致。格雷法需要投影8幅条纹图,相位编码方法需要投影6幅条纹图,而本文方法只需要投影3幅条纹图,所需条纹图明显减少。因此,在一定程度上,该方法加快了测量速度,可应用于快速测量领域。为了验证本方法在相移步数N大于3时的可行性,取N为4时在相同条件下对模型进行测量,同样得到了正确的三维重建结果,见图8(d)。相移算法随着相移步数的增加,相位测量精度越高。假如需要较高的测量精度,本方法只需要增加相移步数N,不需要对测量系统进行任何改进,操作简便,耗时较短。

4 结论
本文提出了一种用于三维测量的快速相位解包裹算法,只需要N步标准相移正弦条纹图,就可以完成绝对相位的计算。首先,利用标准相移算法计算包裹相位和消除背景的Mask;然后,对包裹相位进行正反两次二值化处理,将二值化后的结果分别与Mask卷积,再利用连通域标记算法计算出条纹级次;进而求得绝对相位,最终获得物体的三维重建结果。计算机仿真和实验结果验证了本文方法的有效性和鲁棒性。本文方法中,条纹级次是根据包裹相位计算得到,不会出现条纹级次周期错位的情况;且最少只需3幅条纹图,就可以完成三维测量,数据处理速度快,可应用于快速测量领域。实际应用时,若需要较高的测量精度,可适当增加相移步数N。
