结构光三维测量技术在列车走行部异物检测的应用研究
2019-03-23孙艳涛杨唐文秦勇
孙艳涛,杨唐文,秦勇
(1.北京交通大学 信息科学研究所,北京 100044;
2.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044)
由于高速铁路技术复杂度高、易受环境影响等原因,安全高效是高速铁路建设与运营的首要问题。近几年,越来越多的新技术应用到高速铁路安全保障体系中[1-4]。在此,阐述结构光三维测量技术,并探讨其在列车走行部异物检测中的应用。
1 结构光三维测量技术简介
基于结构光的三维测量技术是非接触式测量的一种,三维视觉能直观反映物体的尺寸、形状、体积等信息,解决二维图像对比度和颜色干扰等问题。结构光三维测量利用光学三角测量原理,以传统的三角测量方法为基础,通过计算被测点与光学基准线的角度变化来计算该检测点的深度信息,从而得到被测物体的三维模型。该测量技术可高效完成三维实体的重建和测量,在三维数字建模、考古发掘、数字化城市等诸多领域得到广泛应用。
三维测量技术在国外起步较早,产品面向各个领域,如工业产品检测、铁路网络检测以及高速三维检查等,检测速度和精确度都处在领先水平。我国结构光三维测量技术正在快速发展中,并已将研究成果应用到实际工业生产和生活领域[5-7]。随着研发的不断深入,结构光三维测量技术在铁路检测应用方面也取得了一些成果[8-11]。传统的铁路检测方式主要依靠人工巡查,不仅费时、费力、可靠性差、效率低下,而且缺少可靠的检测手段和方法。结构光三维测量技术具有精度高、非接触、测速快等优点,其在铁路方面的应用提高了检测工作的效率和可靠性,对保障高速铁路的安全性具有重要意义。
2 原理和方法
2.1 光条图像中心提取方法
在结构光系统中,线激光器由于投射距离和物体表面特性等因素,在被投射物体表面形成具有一定宽度的光条,工业相机捕获到被投射物体表面上的畸变光条图像,光条的宽度一般占5~15个像素(见图1),光条中心坐标的提取精度将影响整个测量系统的测量精度。
理想线结构光光条的灰度分布是高斯分布,现实情况下,光条受到投射距离、环境因素以及投射物体表面特性等因素的影响,光条呈现类高斯分布。综合考虑光条中心提取算法的优缺点以及实际光条的灰度分布特征,采取基于光条灰度特征的曲线拟合方法,该方法对于一定宽度的光条中心提取的精度高、处理速度快。

图1 光条宽度
2.2 激光三角法
激光三角法是结构光三维测量的基础,将光条中心的坐标转换成世界坐标系下的三维坐标。激光三角法原理见图2。
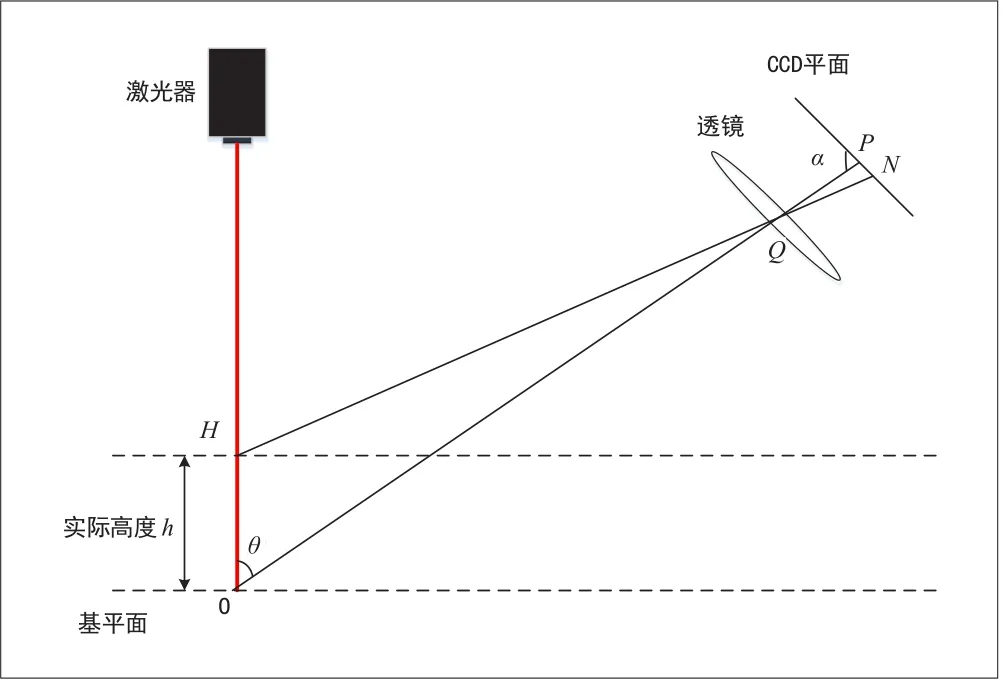
图2 激光三角法原理
首先确定基平面,测量高度h是相对于基平面的高度,激光投射到被测物体表面H处,PN为实际高度h在CCD平面上的映射,根据三角形相似原理,可以确定PN与实际高度h有以下关系:

式中:OQ为CCD光轴与激光光轴交点到透镜中心的距离;PN为实际高度h在CCD平面上的映射;QP为透镜中心点到基准点的距离;α为CCD光轴与CCD平面的夹角;θ为激光光轴与CCD光轴的夹角。夹角α和θ可以利用在相机坐标系下已知的坐标利用余弦定理求得。通过激光三角法,光条中心点坐标系被转换为世界坐标系,实现测量物体模型的重建。
3 技术应用
3.1 技术方案
整体方案分为数据采集端和数据处理端2部分。数据采集端主要由线激光器、工业相机组成,负责列车走行部的图像采集工作。数据处理端是基于MFC的处理程序,负责人机交互、设备控制、设备标定、三维重建以及数据分析处理。
基于技术方案的规划,实验室现场实施方案见图3,分为光电控制、结构光系统以及运动的列车。光电控制分别放在左右两侧,每侧光电开关由发射器和接收器组成,光电控制主要负责发送开始和结束信号到结构光系统。结构光系统被放置在钢轨一侧1~2 m处,线激光器和相机被固定在支架上,相机采集的数据经线路传输到电脑进行数据处理。
整体运行流程为:列车运行到光电开关开始采集点,光电开关触发结构光系统开始采集列车图像数据,列车运行到结束采集点,光电开关触发结构光系统结束采集列车图像数据。采集结束后,数据处理模块对采集到的图像数据进行处理,重建走行部的三维模型。
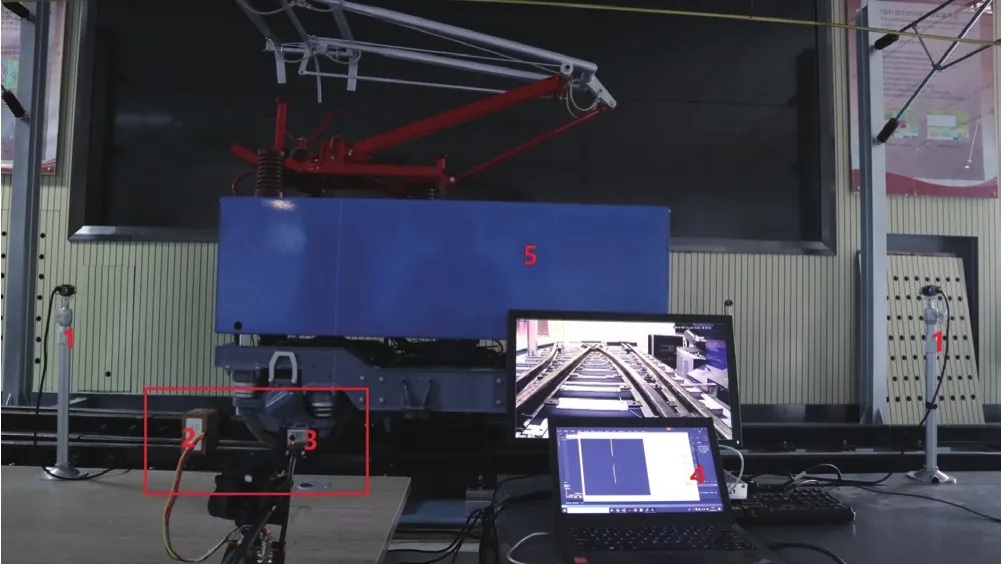
图3 实验室现场实施方案
3.2 硬件选型和软件设计
根据试验实施方案和实验室的平台条件进行硬件选型和软件设计。
(1)硬件方面,主要包括线激光器、工业相机、镜头以及光电控制开关。工业相机和线激光器被固定在可升降云台上,云台可安置在轨旁的任意位置。
(2)软件方面,设计可视化的交互界面,主要包括相机标定界面、光平面标定界面以及实时测量界面。相机标定和光平面标定是前期的准备工作,只需标定一次即可;实时测量界面可以看到结构光系统在工作时的设备状态、数据采集状态、重建结果的显示等。
3.3 数据可视化
数据可视化是将重建得到的走行部模型进行渲染,形成更好的可视化效果,主要分为2个方面:一是三维模型的表面重建,建立离散点云的拓扑关系;二是点云的着色。
(1)表面重建。三维模型的表面重建是将离散三维点云建立拓扑关系,从而还原出实物的原貌,重建后的模型中,轮廓和形状更加清晰,有助于对模型上各零部件进行判别。在获取点云数据时,由于受到设备精度、环境因素、被测物体表面性质变化等因素的影响,点云数据中不可避免地出现一些噪声。针对点云数据中的背景点、噪声点、离群点及空洞等,通过背景去除和滤波的方法进行有效去除。由于表面重建对于离散数据的平滑性有一定要求,通过下采样和增采样平滑点云,同时,下采样能够保证点云原本特征不变并降低点云的规模,提高处理的速度。表面重建使用贪婪投影三角化算法,重建效果见图4。

图4 走行部表面重建效果
(2)点云着色。点云着色是将离散三维点云的每个三维数据点赋值颜色信息。首先通过滤波的方法,滤除三维点云的孤立点。通过对三维数据点的距离聚类,将在空间位置上属于同一区域的离散点划分为同一类别,并对该类别的三维数据点赋值为同一颜色信息。通过对三维点云着色,能够有效区分各部件的相对位置关系。点云着色见图5。
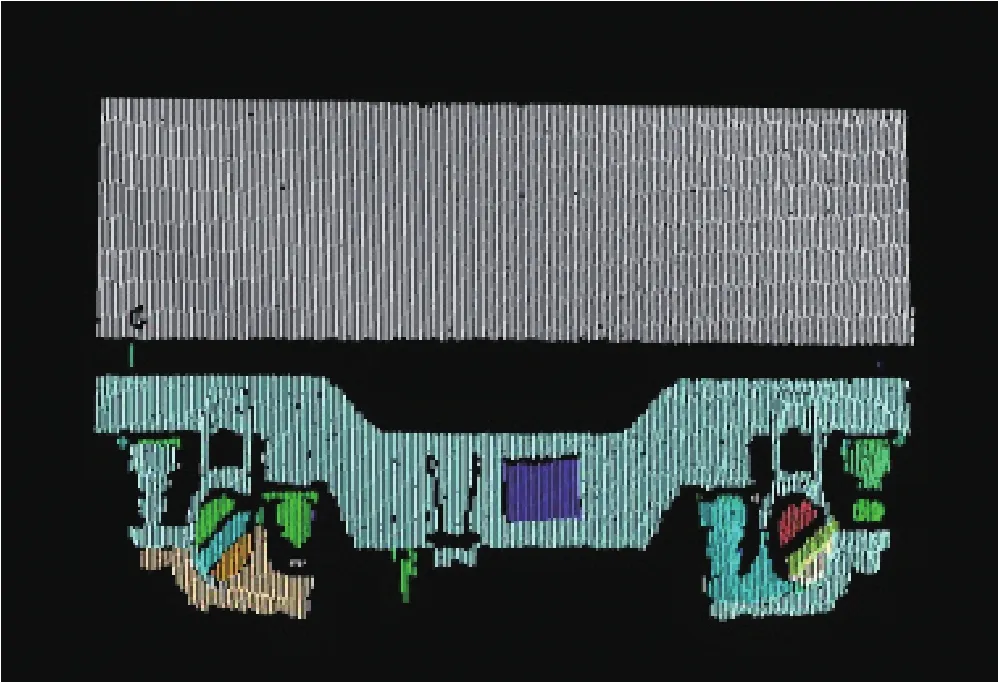
图5 点云着色
3.4 附着物体积测量
列车走行部粘附物的体积测量是三维异物检测的主要手段。体积测量通过点云差值的方法进行计算,其计算流程见图6。
加载重建点云模型和基准点云模型到同一坐标系下,受采集时间点的延迟和列车运行速度的影响,2次重建的点云模型整体出现偏移。利用迭代最近点(Iterative Closest Points,ICP)算法,将重建点云模型与基准点云模型配准,为了加快ICP的运算速度,采用去除背景数据和下采样的方法可降低点云数据量,通过迭代计算最优的旋转和平移矩阵,最终实现点云的配准。将配准后的2个点云模型做差,由于点云数据的离散性,做差后的点云存在大量冗余点。冗余数据大多分布在基准平面上,设定上下限阈值并检测特定位置,去除冗余点,形成附着物点云(见图7),对该点云进行积分计算,得到附着物的实际体积,计算误差为 4.14%。

图6 体积测量流程

图7 附着物点云
4 结束语
为了实现列车走行部的异物检测,提出基于线结构光的三维检测方法,通过结构光系统,重建走行部的三维模型,并进一步测量走行部粘附物的体积,能够为列车运营提供预警信息。在模拟实验环境下,验证了该技术方案的可行性,能够实现列车走行部的异物检测。在三维数据可视化方面,采用纹理重建技术能够进一步提升模型的可视化效果,在测量精度方面也需要进一步提高三维测量的精度。
