菜鸟看模型
2019-03-18

一、俯仰力矩平衡
影响模型稳定滑翔的关键是俯仰力矩平衡,其与模型绕机身横轴转动的俯仰运动有关。模型上的各种力,只要不通过重心,就会产生使模型绕横轴转动的力矩:使模型上仰的为抬头力矩;使模型低头的为低头力矩。注意,力矩的大小由作用力和该力到重心的距离的乘积决定。因此,在分析力矩时,既要注意力的方向,还要注意力的大小(计算时,相同方向的力矩可以相加,相反方向的力矩可以相减)。
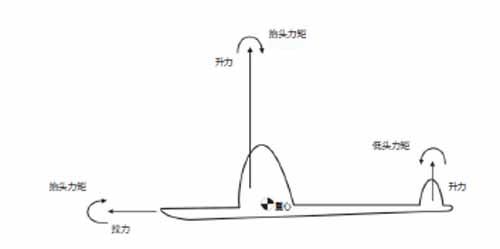
模型力矩分析示意图
模型上,所有促使其抬头的力矩相加可得到总抬头力矩;所有促使其低头的力矩相加可得到总低头力矩。这一对力矩决定着模型的俯仰运动状态:如果总抬头力矩大于总低头力矩,模型就会绕机身横轴抬头;如果总低头力矩大于总抬头力矩,模型就会绕横轴低头;只有总抬头力矩等于总低头力矩时,模型才不会出现俯仰运动而保持平衡状态。这就是俯仰力矩平衡。
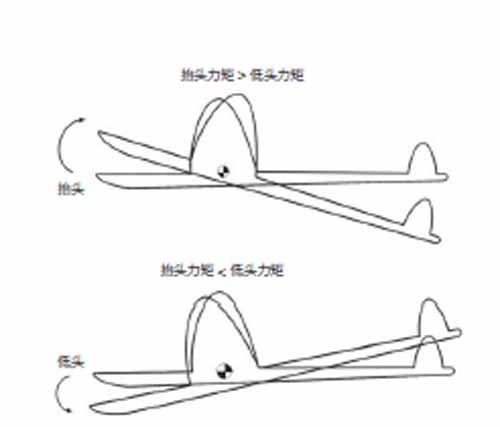
俯仰力矩決定模型的运动状态
产生俯仰力矩的力通常有3种:一是动力装置的拉力,其产生的力矩方向由拉力相对重心的高低位置而定,拉力线如果在重心之上,则会产生低头力矩;如果在重心之下,就会产生抬头力矩。二是飞行时作用在机身各部位的阻力。阻力的力矩一般较小,且不会随迎角而变化或变化甚微,调整模型时一般不用考虑。三是作用在机翼、水平尾翼上的升力。机翼和水平尾翼产生的升力力矩对俯仰力矩平衡的影响最大,是调整模型俯仰力矩平衡的关键因素。
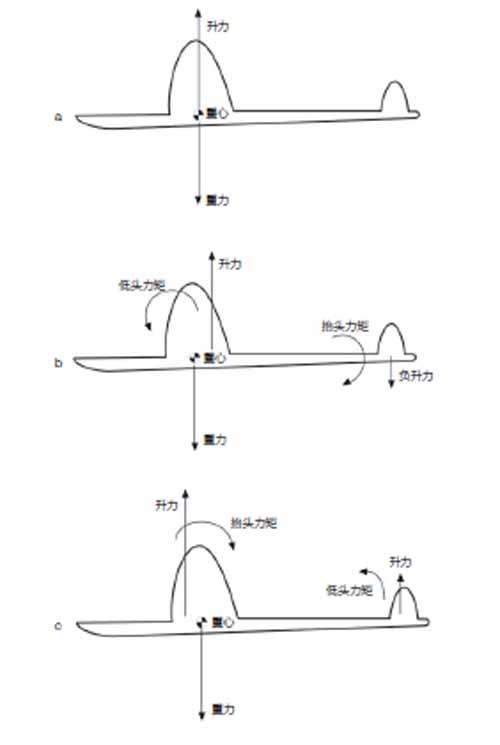
升力力矩平衡的3种方式
二、升力力矩平衡
升力力矩平衡通常有3种形式:第一种是机翼升力通过重心、水平尾翼不产生升力。由于它们对重心都不产生力矩,因此总力矩为零,可使模型达到力矩平衡。第二种是机翼的压力中心(升力作用点)在重心之后,机冀升力产生低头力矩,水平尾翼产生负升力形成抬头力矩,两个力矩达到平衡。第三种是机翼压力中心在重心前,机翼升力产生抬头力矩,水平尾冀产生的负升力形成低头力矩,两个力矩达到平衡。
调试模型时,可根据其重心位置大体上估计出是哪一种力矩平衡方式:重心在机翼30%一35%翼弦长之间的,通常是第一种平衡方式,此时尾翼阻力最小。重心在机翼30%翼弦长之前的,一般是第二种平衡方式,此时模型的稳定性较好,但尾翼会产生负升力,空气动力略有损失。重心在机翼35%翼弦长之后的,一般是第三种平衡方式,此时模型稳定性较差,但能利用水平尾翼产生升力,提高其空气动力性能,常见于竞时项目中。
升力力矩平衡和空气密度无关,调整好的模型不会因空气密度的改变(如高度变化等)而破坏平衡状态。同时,它与模型的飞行速度也无关。升力力矩平衡只取决于机翼和尾翼的面积、升力系数和力臂。如果模型的升力力矩不平衡,可以用改变上述因素的方法使之达到平衡。需要注意的是,实际调整时一般不采用改变机翼或尾翼面积的方法,因为对于已做好的模型来说,这种方法十分麻烦。
常用的调整方法是改变力臂大小,即通过配重的方式移动整机的重心位置。对于重心靠后的机型,前移重心相当于减小了机翼的力臂、增大了水平尾翼的力臂,即减小抬头力矩、增大低头力矩。反之,若后移重心则会增大抬头力矩、减小低头力矩。
对于重心靠前的模型来说,前移重心后,机翼和水平尾翼的力臂都会增大,但前者增加的比例大于后者,故机翼低头力矩的增大多于水平尾翼抬头力矩的提高。而后移重心时,机翼低头力矩的减小大于水平尾翼抬头力矩的减小。总之,无论重心在什么位置,重心前移相当于抬头力矩减小;重心后移相当于抬头力矩增大。
改变升力系数也是调整升力力矩平衡的常用方法。具体来说是改变机翼或水平尾翼的安装角:在一定范围内,增大安装角会增大升力系数;减小安装角会减小升力系数。
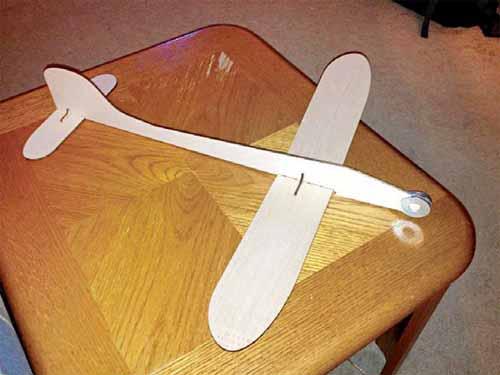
通过加装配重的方式改变模型重心位置,可调整模型的俯仰平衡。
三、迎角
迎角是翼弦与相对气流的夹角。模型飞行时,哪个升力系数能保证抬头力矩和低头力矢卧目等,这个升力系数对应的迎角就是模型飞行中能保证其力矩平衡的迎角。如果模型不以该迎角飞行,抬头力矩和低头力矩就不相等,就会在力矩作用下产生绕横轴的转动,最终达到合适的迎角而保持平衡。
在一定范围内,机翼和水平尾翼的安装角差与其所对应的迎角大体上是正比例关系。具体表现为,机翼与水平尾翼的安装角差越大,保证力矩平衡的机翼迎角就越大;反之,该迎角就越小。操纵模型时的拉杆以及调整时垫高水平尾冀后缘,都会增大安装角差,使该迎角增大;而操纵时的推杆或调整时垫高水平尾翼前缘,则会减小安装角差,使该迎角减小。
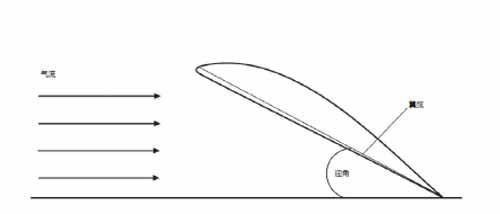
迎角示意图
无论模型是正常滑翔还是不正常的俯冲、波状飞行、或者迫降,其飞行状态的变化均与迎角有关,变化的全過程通常为:小迎角飞行时,模型表现为俯冲,此时迎角越小、俯冲角越大、速度越大。随着迎角的增加,俯冲角和速度都逐渐减小,到一定程度后,模型达到正常滑翔。迎角继续增大超过临界迎角后,模型表现为波状飞行——先是连续的波状飞行(机翼失速、尾冀未失速),接着是间断的波状飞行(机翼、尾翼均失速)。迎角增大到90°时,模型进入迫降姿态。
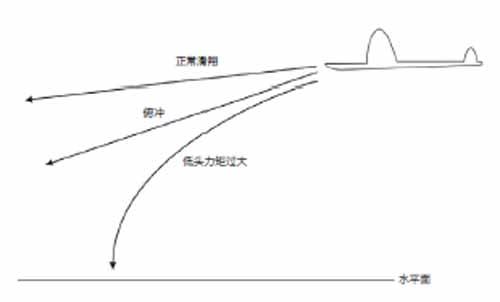
模型俯冲原因示意图
四、俯冲、波状飞行与迫降
模型滑翔试飞时,经常会出现俯冲和波状飞行两种不正常的飞行姿态。想要纠正模型这种错误的飞行姿态,掌握正确的调整方法,首先要了解其形成原因。
造成模型俯冲的原因主要是飞行迎角太小。由于迎角减小,模型的升阻比减小,其下滑角会增大。同时,由于迎角过小,模型的升力系数减小,因此下滑速度很大。解决模型俯冲最常角的方法有3个:一是减小水平尾翼的安装角;二是调整模型重心,使其后移;三是加大机翼的安装角。
造成模型波状飞行的原因是临界迎角以内的所有迎角都不能满足平衡要求。例如,假设一架模型的最大升力系数是1.2,而平衡所需的升力系数是1.4。此时,若用小迎角飞行,模型会产生抬头力矩,导致其不断抬头,迎角随之增大。由于能保证模型力矩平衡的迎角并不存在,因此模型的迎角会继续增大直至超过临界迎角。此时升力系数骤减、阻力系数猛增,模型会因失速下冲。下冲获得速度后,模型又会抬头。如此周而复始,便形成波状飞行。
可通过减小模型保持力矩平衡所需的迎角来解决波状飞行问题,具体方法有3种:一是加大水平尾翼安装角;二是使重心前移;三是减小机翼安装角。在调整模型时,若机翼、水平尾翼安装角差扩大到30°以上、机翼的迎角达到90°附近时,模型的升力为零,只能垂直下降,这种飞行状态被称为迫降。迫降的正确姿态是:机身基本上保持水平,模型的运动方向为平稳垂直下降,且速度缓慢。
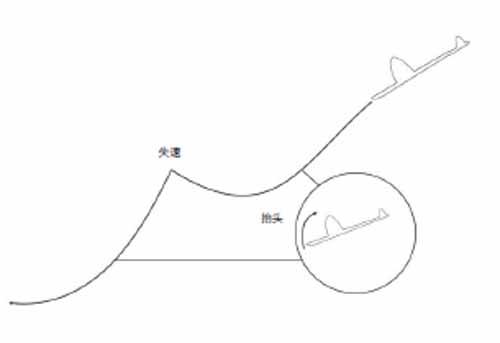
模型波状飞姿态示意图
迫降时,模型可能出现波状飞行、低头前滑和抬头下降3种不正常的姿态。若模型发生波状飞行,一般是因为水平尾翼翘起太小;若模型低头前滑,一般是因为水平尾翼翘起稍小;若模型抬头下降,一般是因水平尾翼翘起太大。切记,迫降时模型出现波状飞行是很危险的,一旦出现要立即调整。而后两种现象虽不危险,但下降速度较大,也应调整。此外,模型迫降时还容易发生螺旋,通常是由横侧力矩或方向力矩引起的,主要是因为机翼扭曲或水平尾翼向一边翘起偏斜。
