无人机自动避障技术在输电线路巡检中的应用
2019-03-16方远征刘洪伟胡春生
方远征,刘洪伟,刘 霄,胡春生,王 伟
(国网山东省电力公司检修公司,山东 济南 250118)
0 引言
超、特高压线路已成为全国电力网络系统的大动脉,为确保电网系统主干网络的安全稳定运行,需对输电线路本体及线路通道内出现的各类情况进行掌握,尽早发现隐患,并及时进行处理。在输电线路巡检中,无人机能够近距离检查输电线路本体,其携带的各类传感器能够拍摄、存储大量影像资料,给输电线路运维人员进行比对、分析,能够快速判定输电线路存在的缺陷,相较于人工巡检,具有检查线路缺陷效率高、安全系数高等优点[1]。无人机在巡检过程中,需保证与带电线路保持安全距离,利用无人机自动避障技术,有效避免了碰撞事故的发生,提高无人机巡检的安全水平。
1 无人机自主避障系统设计原理
自主研发的多旋翼无人机避障系统依据其测距方法主要可分为3类:一是超声波测距法;二是飞行时间测距法;三是由多种测距和图像处理方法相结合的复合型测距法[2]。以上3种方法只应用在某种特定的无人机飞控系统自主避障功能的开发设计中,当开发者对无人机构造不了解时,以上测距方法不能与无人机飞控系统相适配。多旋翼无人机运行机理为遥控器接收机接收飞行控制信号并将其传递给控制模块,进而传送给无人机执行机构驱动其飞行。根据无人机设计原理在遥控器接收机与飞控模块之间增设自主避障模块,其中自主避障模块由超声波传感器和Arduino UNO平台两部分组成,如图1所示。超声波传感器通过发射超声波信号并收集由障碍物反射回的信息,实时检测出无人机与其飞行环境周围存在的障碍物之间的距离,并传递给Arduino UNO平台。Arduino UNO平台通过比对遥控器接收机接收的无人机飞行控制信号和采集到的超声波传感器检测的无人机与障碍物之间的距离信息,进行逻辑判断,进而重构出飞行控制信号,并将重构出的飞行信息传递给无人机系统的执行机构,当无人机飞行中遇到障碍物时飞机能够以准确姿态避开,从而在不改变无人机飞控系统软硬件的情况下实现精准避障。

图1 多适配性无人机避障系统方案
2 无人机自主避障模块硬件平台搭建及软件设计方案
2.1 硬件平台搭建
2.1.1 电源模块
Arduino UNO控制板作为超声波传感器及遥控器接收机的信息存储单元,为减少了外界信息的干扰,采用外部独立电源供电,图2为系统供电模块原理图,Vin为电源输入端口,允许输入电压范围为5~10 V,A4端连接二极管,其单向导通的特性有效避免了系统元器件因电源极性接反而被烧毁的问题。
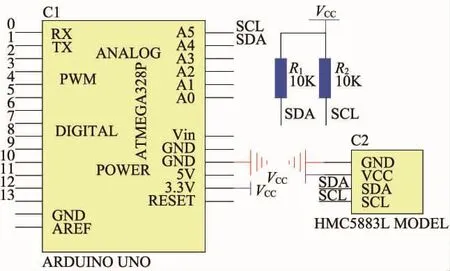
图2 外部供电模块
2.1.2 Arduino UNO与飞控接口设计
Arduino UNO芯片作为Arduino市场的主流产品,端口丰富,功能强大,用户根据不同的需求可灵活选择各类开发平台,选取该型号芯片作为自主避障模块核心控制元件[3]。Arduino是当前市场上比较受欢迎的嵌入式开发平台,该处理器无论硬件还是软件都是开源的,用户可以查看其源代码、设计图表等信息,设计方式极其灵活。主要包含两大部分:Arduino电路板和Arduino IDE模块,前者是起连接系统作用的硬件部分;后者根据传感器来感知、反馈周围环境的变化,开发板上的微控模块可以应用其自身的开发语言进行编程,并将翻译后的机器代码,录入控制芯片内。
Arduino UNO控制板与飞控系统之间采用14路数字信号传递数据与控制信号,端口工作电压为5 V,端口输出接入最大电流为40 mA,外部配置20~50 kΩ上拉电阻。Arduino UNO各芯片引脚的功能为:控制接收信号串口RX(1号),控制发送信号串口TX(2号),连接信息交换芯片,控制与外部芯片进行信息交换;脉宽调制 PWM(2、3、4、5、6、7)引脚,输出8位控制数据信号;外部触发中断(8号和9号)引脚,为跳沿触发方式;SPI(10(SS),11(MOSI),12(MISO),13 (SCK)) 可以 SPI通信接口;LED 灯(13号)测试接口,用于测试Arduino的LED接口,当该端口输出低电位时LED为熄灭状态,反之该灯被点亮。
2.1.3 超声波传感器选型
综合分析超声波传感器测距范围、测量精度及其质量、体积与无人机负荷能力相适配等问题,选取尺寸、重量适中,测量范围较大、精度较高型号为 US100-Y401的超声波测距传感器,如图3所示。

图3 US100-Y401的超声波测距传感器
US100-Y401型超声波测距系统通过软硬件结合可实现串口的全双工通信,通过设定不同访问地址,单个通信口可实现对16个不同地址的设备的访问,且在测距中选择其低功耗模式,能够大量节省传感器热损耗,在实际应用中选择采集信息的指令校准功能,能进一步提高测量精度。其声波输出功率较强,能在复杂的外界干扰条件下(电磁波和声波),通过实时校准,实现对距离信号的精准测量。该型号传感器工作电压为3.3~5 V,探测功能强大测距范围可达700 cm,环境温度在-40~65℃范围内正常工作,其高频率声波探测能力,避免了被探测物形状、颜色等干扰因素的影响,从而获取准确的距离信息,达到精准快速避障的目的。
在探测无人机飞行环境周围的障碍物时,为消除US100-Y401超声波传感器的检测盲区,飞控系统对测距结果将进行分组处理。
2.2 软件设计方案
2.2.1 软件流程
基于以上硬件控制平台,无人机自主避障模块软件设计流程如图4所示。Arduino UNO平台首先接收用户通过遥控器输入的无人机的原始飞行控制信息,然后读取超声波传感器检测到的无人机与障碍物间的距离信号,并进行逻辑判断。若通过系统判定得知无人机与被测量障碍物之间的距离大于系统设定的安全距离,则无人机按照遥控器接收机的原始输入信息执行飞行任务;若通过系统判定知无人机与被测量障碍物之间的距离在系统设定的安全距离范围之内,则无人机认定障碍物对其安全飞行构成威胁,飞控系统赋予飞行器执行机构值为K*(安全距离和测量距离之差)的控制信号,使无人机远离障碍物到安全距离以外,其中K值为正系数避征值,其值越大,无人机避障反应越明显。

图4 软件流程
2.2.2 算法实现
基于以上设计思想,在设计完成的Arduino UNO硬件控制平台上,完成自主避障飞控系统的软件程序调试工作。设计中无人机的加速与方向舵通道为独立控制单元,系统综合信息判定的结果只控制升降舵与副翼的运行,万一发生无法预料的情况时,可直接控制加速与方向舵调整飞机运行状态,避免意外状况发生,保证飞机运行安全。自主避障飞控系统软件程序内定义无人机与障碍物间的距离变量为distance,对于检测结果系统首先进行滤波处理,若测量距离大于等于40 cm,distance赋值为40 cm。无人机的安全距离设置为40 cm,其目的是在无人机与障碍物之间设定了一个0~40 cm敏感区域,若无人机进入该范围,系统认定无人机为非安全飞行状态。自主避障模块运行时,由系统设定的安全距离减去变量distance并将差值赋予变量error,若error值为0,无人机机按照遥控器原始输入信号飞行;若测量知无人机与障碍物之间的距离为30 cm,则error值为10 cm,通过调整比例系数飞控系统获取控制信息驱动无人机调速机构飞离障碍物,至安全距离大于40 cm,从而实现准确避开障碍物的目的,无人机避障反应与变量error值成正比例关系。
2.3 系统验证
为验证设计的有效性,需进行飞行测试,选择六轴六浆的多旋翼无人机平台Wookong-M飞控系统进行试验。试验时,操作人员操作无人机匀速接近障碍物时,无人机避障反应明显,当无人在雷达区域外时,可稳定悬停在空中。无人机操作人员对其飞行环境周边的障碍物做出提前预判,及时调整飞机运行姿态,为保障无人机与输电线路的安全提供保障。该型号超声波传感器检测障碍物的范围达700 cm,辨识精确度达到0.1 cm[4]。此外,该型号传感器对采样数据可以进行滤波处理,其指令集中有校准功能指令,能进一步提高测量精确度,通过实际验证测量模块得出如下特点:1)测量角度30°锥形;2)与地面平行飞行不受电磁干扰;3)超声波传感器波束方向与被测物因测量夹角存在的误差,不影响其自主避障功能的实现;4)测量最小能见度1.5 cm2左右;5)物体最大测量面积700 cm2左右。考虑无人机巡视输电线路时的飞行环境,综上可知选用US100-Y401型传感器能够满足使用要求。
系统采用Arduino UNO和超声波传感器相结合的方式,超声波传感器探测无人机飞行环境周围存在的障碍物,Arduino UNO平台收集输入的相关信息进行逻辑信息重构,进而驱动无人机调速器改变飞机运行姿态,准确避开障碍物。本设计具有超强的抗电磁干扰能力,整个系统按照国标设计,静电抗扰度和电磁抗扰度等级均达到500 kV输电线路运行要求。 同时充分考虑了系统应用环境的变化,系统应用到不同型号无人机,可根据环境的不同,用户要求的不同,灵活地调整系统设置。
3 结语
多适配性无人机避障模块介于遥控接收机和飞行控制系统之间,采用外接电源进行独立供电,选用US100-401超声波传感器进行测距,并将超声波雷达与Arduino UNO硬件控制平台相融合,发射探测信号,采集反馈信息,接收遥控器接收机数据,实现了接收机与飞控系统的互联。通过对试飞过程的跟踪观察,和无人机在飞行过程中对障碍物的感知和躲避的分析确认,能够实现有效躲避障碍物,提高了无人机巡检的安全性,推广使用将充分发挥避障系统的实时性、可靠性、易用性和可扩展性。