一种结合噪声辅助技术和现场数据的模拟电路实时可靠度预测方法
2019-03-13闫理跃王厚军刘震
闫理跃, 王厚军, 刘震
(电子科技大学 自动化工程学院, 四川 成都 611731)
0 引言
故障预测和健康管理(PHM)技术研究是武器装备可靠性领域的尖端课题[1-5]。随着信息化时代的技术进步,模拟电路已经成为现代化武器装备中的重要部分,引信系统、电源系统、制导系统等都离不开模拟电路,模拟电路的可靠性已经成为影响武器可靠性的关键因素[6]。
现实工程中,由于实验时间和运行成本的诸多限制,同类电路中各个个体之间的可靠性也存在着差异,从而导致反映同类产品总体平均特征的传统可靠性分析方法已经很难适用于个体产品的实时可靠性评估。因此,为了满足工程和实验的需要,需要探索新的实时可靠性预测方法。
对于模拟电路可靠性评估和预测而言,最关键的步骤是寻找合理表征电路性能退化特征的模型。在已有研究中[7-10],一些学者采用添加额外噪声的方法来改进信号处理能力,并进行了有效的模拟电路故障诊断。Yan等[11]利用基于卡尔曼滤波的噪声辅助技术来确定电路的退化趋势,取得了较好效果。为了在时间序列上跟踪电路的退化趋势,美国马里兰大学Vasan等[1]提出了一种故障指示器(FI)的概念,根据FI变化情况预测系统的失效时间。这些研究成果均为模拟电路的预测方法提供了新的研究思路。然而,为了使预测的研究结果更具现实意义,针对模拟电路日趋复杂的电路结构,还需要引入电子元器件的失效物理(POF)模型,以代替理想化的理论假设。美国马里兰大学Alam等[12]的研究展示了在一定温度应力作用下某种嵌入式平面电容器的退化模式,并给出了其作为POF模型的量化数学模型。对于模拟电路而言,基于不同材料特性的电子元器件POF模型是影响电路可靠性的关键因素,根据电路元器件之间的拓扑关系,可以很容易地量化电子元器件POF模型和电路退化模型之间的互联关系。
2011年,美国马里兰大学He等[13]首次将剩余有效性能(RUP)的概念应用于电池系统的故障诊断和可用性能预测研究中,使得预测结果不再是一个具体时间,也不再是一个预测均值,而是一个表征剩余可用性能分布的概率密度函数。这个概率密度函数可以为研究人员提供更多的预测可能性信息,作为一个电子产品故障预测结果的有效最终量化指标,剩余的有效性能被定义为从观察时间到有效性能结束(EOP)标准到达时的时间间隔[14],从而为PHM技术方法提供了新的评价指标。
尽管如此,目前对实时可靠性的研究还是有限的。文献[15]采用平稳Gamma过程描述系统或元件的退化过程并使用贝叶斯估计方法来实时更新其参数,但是由于缺乏数据分布等其他信息,针对性较强。文献[16]采用数据预处理技术搭建了基于时序建模的可靠性分析模型,但这种方法在不考虑现场实验数据情况下可能更可取。文献[17-19]采用贝叶斯方法对先验密度函数中的未知参数进行估计,但存在样本分组方法不合理甚至所估计的参数不准确问题。文献[18-19]采用基于贝叶斯推断的信息融合方法搭建动态的实时预测框架,取得了不错效果,但是没有考虑产品实际的失效物理模型,使得先验信息的准确性不能保障,无法推广。文献[20]采用基于隐半马尔可夫模型(HSMM)的预测方法预测轴承故障,但是其假设条件过于简化,影响了预测精度。基于上述情况,本文提出一种基于辅助噪声技术和贝叶斯估计方法的综合评估方法。该方法能够在最大程度上利用外推产品的伪失效性能,获得高可信度的先验信息,再结合现场数据,更新得到较准确的实时可靠度评估结果。
本文展示了所提出的PHM方案框架和流程;采用一种基于噪声辅助技术的新型算法表征电路的退化趋势,并利用粒子滤波方法计算外推电路退化的伪失效性能;结合现场数据,采用基于贝叶斯推断的信息融合方法,更新电路退化的实时RUP. 在实验验证阶段,引入基于一个嵌入式平面电容实测数据的失效模型,并利用仿真电路例子验证本文所提实时预测方法的有效性。最后,对本文所提方法进行总结,并探讨未来工作的可能方向。
1 实时预测流程
为了更好地解决模拟电路的实时故障预测问题,本文针对RUP的预测,引入了电容器物理失效模型和相关退化数据作为研究的关键,利用有效的粒子滤波方法对电路系统进行了伪失效性能的预测。
贝叶斯理论是信息融合领域的常用方法。它依据概率原则对原始信息进行组合,以条件概率表示测量不确定性。贝叶斯理论可以将各个单独物体的关联概率分布合成一个联合的后验概率分布函数,通过使联合分布函数的似然函数为最小,提供信息的先验模型,并提供整个信息的一个特征描述。
本文信息融合方法实行步骤如下:1)选择合适、具有时变参数的适当分布来表示性能变量的分布;2)确定相应时变参数的先验密度函数;3)结合现场数据与贝叶斯方法得到相应的后验密度函数,根据预估样品的预估寿命来计算实时可靠度,进而得到失效模型。实时可靠度预测流程如图1所示。

图1 实时可靠度预测流程Fig.1 Flow chart of real-time reliability prediction
2 算法步骤及流程
2.1 先验密度函数中未知参数的估计
众所周知,电子系统的失效分布通常为指数分布、威布尔分布或者正态分布[15, 21],限于篇幅,这里只对正态分布的现象进行探讨和研究。此处,将RUP的时间参数表示为T~(μ,σ2),其概率密度为
(1)
式中:μ和σ分别表示产品在某一时刻其RUP分布的均值和方差。对于稳定的产品或系统,在估计j(j=1,2,…,n)时刻产品有效性能的分布参数时,通常认为T的均值μj未知、方差σj已知。这是因为对于性能稳定成熟的产品或系统,部分样本寿命可能会相对于整体样本的寿命均值有较大偏差,部分样本寿命可能会相对于整体样本寿命均值非常接近,但由于其总体性能的稳定性,其偏差程度与总体偏差程度大致相近。而具体寿命均值则要根据具体产品各个批次的实际生产情况和产品实际被使用情况而定,会在一定区间内波动。根据正态分布的方差计算公式可得
(2)



针对以上问题,为了合理利用仅有的历史数据,本文提出一种滑动窗口的样本分割法。该方法首先假设用于估计均值μj的可靠性试验数据量共有n个,分别表示为D1,D2,D3,…,Dn,设滑动窗口的长度为m、滑动步长为1. 将第1个至第m(m 这种方法既可以保证样本的数量,又可以在一定程度上保证样本内的数据量,从而不会出现前述两种方法存在的问题和风险,实现了更为优化的样本生成方法。若可靠性试验数据的变化很缓慢,则可以根据实际情况适当放大滑动步长。同时,结合噪声辅助方法,可以更好地估计产品的伪失效性能,保障最后RUP预测精度的提高。 文献[10,22]已经证明,在电路输出信号的时域或频域中所提取的特征参数集,对于描述电路的退化特性没有本质区别。因此,本文基于电路时域输出信号的卡尔曼滤波方法高斯白噪声估计技术,给出有效噪声辅助技术外推伪失效性能方案如图2所示。 图2 有效噪声辅助技术外推伪失效性能Fig.2 Extrapolation of pseudo-failure performance using noise-assisted technique 为了进行电路预测,假定故障退化程度随时间逐渐增加。由于预测过程的不确定性和系统扰动的影响,模拟电路输出总是与无故障输出值有一定的小偏差。对于一个典型线性系统如线性电路,理想的无故障输出信号在退化过程开始时被视为初始状态。由于性能退化随着时间的推移而增加,输出波形随时间的推移逐渐偏离理想的无故障输出信号。因此, 特征提取模型可以看作为对于各个退化时刻输出特征信号提取的一个线性随机差分方程组: (3) 式中:xk和yk分别为k时刻信号输出和测试值,且xk、yk∈Rn;F为状态转移系数,表明当前系统状态xk只随上一时刻状态xk-1而改变;离散并可变的wk-1和vk分别表示由元件退化、测试和容差等引入的过程噪声和测试噪声,且假定它们服从正态分布: (4) 式中:Q和R分别表示过程噪声方差和测试噪声方差。尽管方差Q和R在每个时刻时都可能会发生变化,但这些变化与测量值相比非常小,因此设定Q和R为1个常量。 为了找出故障与输出信号之间的关系,根据电路输出信号提取的模型(3)式,提出一种基于卡尔曼滤波的新模型。输出波形表示为初始波形叠加高斯白噪声,进而构造FI的变化模型。对于每个时刻,FI变化可用一个线性随机差分方程表述。 系统动态模型: xk=Axk-1+Buk+wk, (5) 测量方程: zk=Hxk+vk, (6) 式中:uk为k时刻对系统的控制量;A和B为系统参数;zk为k时刻的测量值;H为测量系统的参数。 此外,对于被测模拟电路而言,xk总是非常接近xk-1,因此设置控制输出为u=0且uk=0;同时,参数A和H都假设等于1. 根据系统模型,可以根据系统的前一时刻状态信息来预测当前状态: (7) (8) (9) 式中:Kk为k时刻的卡尔曼增益, (10) (11) xk和Pk都将作为下一次预测的初始值参与到新的预测当中,并不断迭代。在预测过程中,FI代表了实时的退化趋势。从上述噪声辅助方法中获得的辅助噪声值在每个离散时刻中都被认为是FI,从而可以生成一个基于时间序列的FI数据集。 为了计算每个离散时刻的FI值,可以通过卡尔曼滤波器估计辅助高斯白噪声值。评估步骤如下: 1)提取初始状态(无故障状态)并输出。在退化过程中,将电路理想的无故障输出信号作为初始状态值。本文采用误差范围内实际的电路输出信号无故障状态和电容元件的无失效测试值,作为理想的初始状态电路信号输出值。 2)在元器件退化过程中提取电路并输出。假设电容元件的电容值退化随时间的推移而加重,需要提取各时刻的电路时域输出波形,并提取相应的特征参数集。 3)基于卡尔曼滤波的噪声估计。为了估计无故障输出和每个元件退化时间下的输出之间变化所等价的辅助噪声值,采集无故障输出波形所得的特征参数集并设定为xk-1,将每个时刻电路故障情况下所采集的输出波形所得到的特征参数集设定为yk.卡尔曼滤波器被用于估计电路时域输出信号的当前状态,同时假设卡尔曼滤波器估计的噪声满足标准正态分布。由于xk逼近或背离yk的概率是均等的,且xk和yk之间的欧几里德距离d不能直接用作判别值来确定最优辅助噪声,因此用(12)式来确认最优辅助噪声的判别式: (12) 式中:α1,α2,…,αn表示由卡尔曼滤波器估计得到的当前输出数据序列;β1,β2,…,βn表示采集每个时刻元件退化情况下的输出波形所得到的数据序列;γ1,γ2,…,γn表示采集无故障、无元件退化输出波形所得到的初始数据序列;n为数据序列矩阵的维数。 电路RUL定义为从当前时间到其有效寿命结束的间隔。本文中当一个模拟电路的电容偏离了其标称值、超出设计时所定义的某一限制级别时,认为它是故障的。但是,已出故障的关键组件仍可正常工作,只是不能在操作范围内运行。另一方面,对于电路或系统,RUP代表了剩余的仍然可运行时间,因此本文用RUP代替RUL作为预测的衡量。 随着时间t的推移,产品的累积失效概率F(t)与失效概率密度f(t)之间有如下关系式: (13) 则产品剩余可靠度的计算方法[15,21]为 (14) 式中:F(t)为产品的失效分布。在实践中,需要利用已经得到的现场数据来估计μj和σj,从而外推得到产品的失效性能,这个外推预估的失效性能被称为伪失效性能。 (15) (16) (17) SIR方法用来解决粒子的退化问题。经过几次迭代,在SIR过程中,权重较小的粒子被消除,权重较大的粒子被留下。在每个预测步骤中,用故障阈值检查预测状态。当FI超过故障阈值时,预测过程会停止。RUP估计是通过计算预测的故障时间和当前时间之间的距离进行的。α步预测可近似表达为 (18) 式中:ng为粒子重叠的次数。 假设利用现场数据外推得到的伪失效性能退化数据为xj,则其后验密度函数为f(T|xj)。根据贝叶斯公式,则T的先验均值μj的后验概率密度函数f(μj|xj)[15]为 (19) 由于正态分布具有共轭特性,即后验分布和先验分布具有相同的分布类型[21],假设后验均值分布的均值为μ1,方差为σ1,则有 (20) 何军是我1988年从南宁邮政调到广西艺术学院带的第一届学生,当时我做班主任。他绘画基础较好,在大学期间通过专业学习,广泛接触了国画、油画、版画、设计等专业课程,加上人也比较勤奋,在学生时代就创作了不少优秀作品,令人印象深刻。比较巧的是他1992年本科毕业分配在广西邮政从事设计工作,说起来我们都有“邮缘”。 (21) 从而得后验密度函数 (22) 嵌入式平面电容对于整体电路的可靠性有重要影响,在整个电路中具有重要作用。文献[12,25]将嵌入式平面电容器作为一种典型研究对象,在温度125 ℃和恒定电压285 V条件下持续进行500 h的退化实验,得到反映退化趋势的经验方程:C=C0-klnt,式中:C0为初始电容值,这里是1个常数;k为反映电容退化的系数,用以表征电容值的退化程度和速度。系数k的取值根据材料特性而定。表1给出了相应的初始数值。 表1 电容器初始电容及其在实验环境中 电容退化的系数 在电容器退化模式研究中,电容值退化趋势一般随时间的推移而逐渐变化。因此,本文中将电容值作为非常好的量化指标,以此衡量电容退化的情况。 根据2.1~2.6节所述方法,以图3所示的实验电路为例,考虑到电容C2为退化电容,假设所有元件都处于正常容差中,容差设为±10%,可得到时域波形(见图4)。 图3 实验电路Fig.3 Circuit under test 图4 初始波形和故障波形在时域特征上的比较Fig.4 Initial and fault waveforms 如图4所示,为了测量两种波形之间的差异,根据基于卡尔曼滤波器的高斯白噪声估计方法,将噪声加入初始波形中,结果如图5所示。 图5 添加辅助噪声的初始波形和故障波形在 时域特征上的比较Fig.5 Initial waveform with auxiliary noise and fault waveform 此时,可以对电路性能的退化趋势(见图6)进行跟踪建模。 图6 电路性能的退化趋势Fig.6 Performance degradation trend of circuit 进而得到FI退化趋势的曲线拟合方程为 f(t)=aktbk+ck, (23) ak=ak-1+v1,v1∈N(0,σ1), 式中:f(t)为时刻t的FI值;k为测试时刻;v1、v2、v3为服从均值为0、标准差为σ1、σ2、σ3的高斯分布。用不同时刻(10、20、30)的3个数据集来预测伪失效性能的特征参数集,预测结果如图7所示。 图7 不同时刻的不同预测结果Fig.7 Different predicted results at different moments 由图7可见:不同时刻的不同拟合曲线具有不同的预测精度;代表前10个时刻预测值的蓝色曲线和前20个时刻的红色曲线均明显偏离原始数据,但第30时刻的绿色曲线具有较好的预测精度。 图8 实时可靠度预测曲线Fig.8 Real-time reliability prediction curves 由图8可见:从0时刻开始,客观产品具有完全的可靠度,经过一段时间的有效加速测试后,其可靠度会随时间逐渐变化为0;随着集成现场数据量的增加,预测曲线逐渐接近产品真实的可靠性退化趋势。 上述仿真结果表明,现场信息越多,该产品的实时可靠度预测精度就越好。随着有效时间的增加,产品的可靠度开始急剧下降。 本文所提方法基于历史数据,通过辅助噪声技术和粒子滤波估计来获取到电路伪失效性能的相关时间参数,并利用合理优化的样本生成方法做出估计,再利用贝叶斯方法融合现场数据,最后得到当前产品的实时可靠度模型。所得主要结论如下: 1)本文方法可以有效预测电路的实时可靠度,并随着现场信息的增多,预测精度不断提高。 2)本文方法能够优化估计性能参数,减小当前计算实时可靠度的方法中存在的误差,让工作人员更好地了解产品的实时工作状况,为技术人员关于故障PHM的决策提供了实时数据支持。 但是,当系统不够稳定、数据有异常波动时,目前研究方法均有可能出现不能充分利用历史数据以及样本选取不准确等问题,从而影响最终的实时可靠度结果。因此,在今后研究中,需要在样本选取环节进行数据的差异性分析等预处理,以避免不合理的样本选取对最终预测结果的危害。2.2 噪声辅助技术

2.3 卡尔曼滤波


2.4 估计伪失效性能的估计


2.5 粒子滤波


2.6 计算后验密度函数


2.7 计算实时可靠性

3 实验与仿真验证
3.1 嵌入式平面电容实例

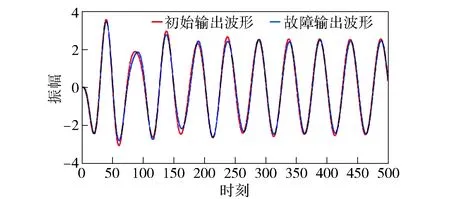
3.2 仿真电路讨论



bk=bk-1+v2,v2∈N(0,σ2),
ck=ck-1+v3,v3∈N(0,σ3),



4 结论
