基于模型的智能汽车电子电气架构发展综述
2019-03-11华一丁龚进峰戎辉唐风敏王文扬何佳
华一丁,龚进峰,戎辉,唐风敏,王文扬,何佳
(1.天津大学,天津 300072;2.中汽研(天津)汽车工程研究院有限公司,天津 300300;3.中国汽车技术研究中心有限公司,天津 300300)
0 引言
汽车电子已经从提供非重要功能演变到辅助驾驶,从感知和驱动的机电构件发展到高性能高负载的处理器,汽车电子领域已取得长足的发展。电子器件不仅越来越便宜,在电子产品消费的推动下,功能也越来越强大,足以处理汽车中越来越复杂的功能领域问题。电子控制单元(Electronic Control Unit,ECU)集成和功能化的趋势使得其实现域控制,在E/E框架演变的过程中,从模块方法转变成更加集成化的方法,实现ECU和域的融合。
近年来,自动驾驶所带来车辆结构的改变,使得许多传感器和电子控制单元被添加到当前的车辆架构中,并需要进一步提高其可靠性、安全性和可扩展性等要求。而汽车的电子电气架构也随之带来改变。
1 域控制器
汽车电子按“域”划分,传统上这些域之间无论是机械、电器还是控制上都是相互独立的,如今这些域之间有了更多的交互[1]。汽车电子一般分为动力总成域、底盘域、车身域与多媒体域。动力总成域包含发动机、变速器、传动轴和车轮,也有很多改善驾驶性能、减少污染、提高效率和安全性的传感器及控制元件;车身域包括加热和空调控制、座椅控制、车窗控制和灯光控制等[1]。
高级辅助驾驶(ADAS)功能与车载网络互连功能的出现衍生出新的系统,比如高级驾驶辅助系统和驾驶员/行人安全系统、人机界面(HMI)和远程信息处理系统等[2]。车载 E/E系统提供的众多功能中,有些功能只在一个域的内部进行信息互连互通,也有些功能需要跨域并与其他域的系统进行信息交互。
为了实现高度自动化的驾驶功能,智能驾驶对域内的ECU之间也提出了更多的交互要求,如雷达、摄像头、超声波传感器等,并且需要单独的域ECU来控制这些功能相似的传感器部件,比如自动驾驶中的多传感器融合。
如今,连接域控制单元和传感器以及执行器的数据集是预定义的。为了实现智能驾驶过程中的各种操作,必须预先设定每个域的工作模式以及每个域内的连接执行器和传感器的方式。根据域控制器功能的不同,具体的内部结构也有所不同,如图1所示。

图1 连接E/E架构的可能实现形式
未来不同域之间的联系也会更加紧密,比如底盘域和动力总成域;动力总成域和驾驶辅助域联系也会更加密切。NAVALE等[3]提出驾驶辅助域会成为传感器和底盘域中嵌入功能之间的联系,底盘域和动力总成域会融合,通过功能分割来协调,成为车辆运动控制域。该域与驾驶辅助域和能量管理系统共同工作,协同来控制车辆,这样的架构会很大程度简化高度自动驾驶的实现过程。
2 电子电气架构模型的演变
汽车E/E架构的演变过程如图2所示[3]。在发展初期,每个模块都有单独的ECU,随着ECU的合并以及软硬件的集成,促进了架构模型从单元模块到更加集成化模块的发展,并逐步实现了ECU和域的融合。域之间的联系愈发紧密,这种趋势随着自动驾驶的逐渐发展会继续发展。并且随着智能网联技术的愈发成熟,使用云端处理器来集中处理车辆也逐渐成为可能。

图2 汽车E/E架构演变示意图
智能网联汽车和电动/混合动力汽车的发展推动了汽车电子电气架构的变革。车辆个体复杂程度的增加、互联通信的普及,对于通信带宽、通信速度、计算能力以及电子电气架构的可延展性都提出了更高的要求。实时性需求、诊断服务请求、总线负载限制、安全与加密需求等整车功能导向目标都是在设计E/E框架时需要考虑的[2]。下面对当前及发展中的E/E架构进行更详细的介绍。
当前E/E架构的典型特征是将整个体系结构分为不同的域,如动力总成域、底盘域、车身域、信息娱乐和远程信息处理域,每个域对一部分ECU进行整合,这些ECU通过共享总线系统进行通信,中央网关将不同网络的域相互连接,并使不同领域的ECU能够进行通信[4]。
图3所示是一个实际的具有中央网关的集中式E/E架构,各组件和传感器与中央网关相连,由于ECU内部通信及ECU网关通信都处于同一线路上,使得网关的通信负载很高。这种结构导致复杂度的上升,因为太多可选组件整合在架构中,当多个ECU同时使用线路时复杂程度上升,同时软件更新更加困难。由于所有数据需通过网关,随着数据量的增大,网关逐渐成为瓶颈[5]。
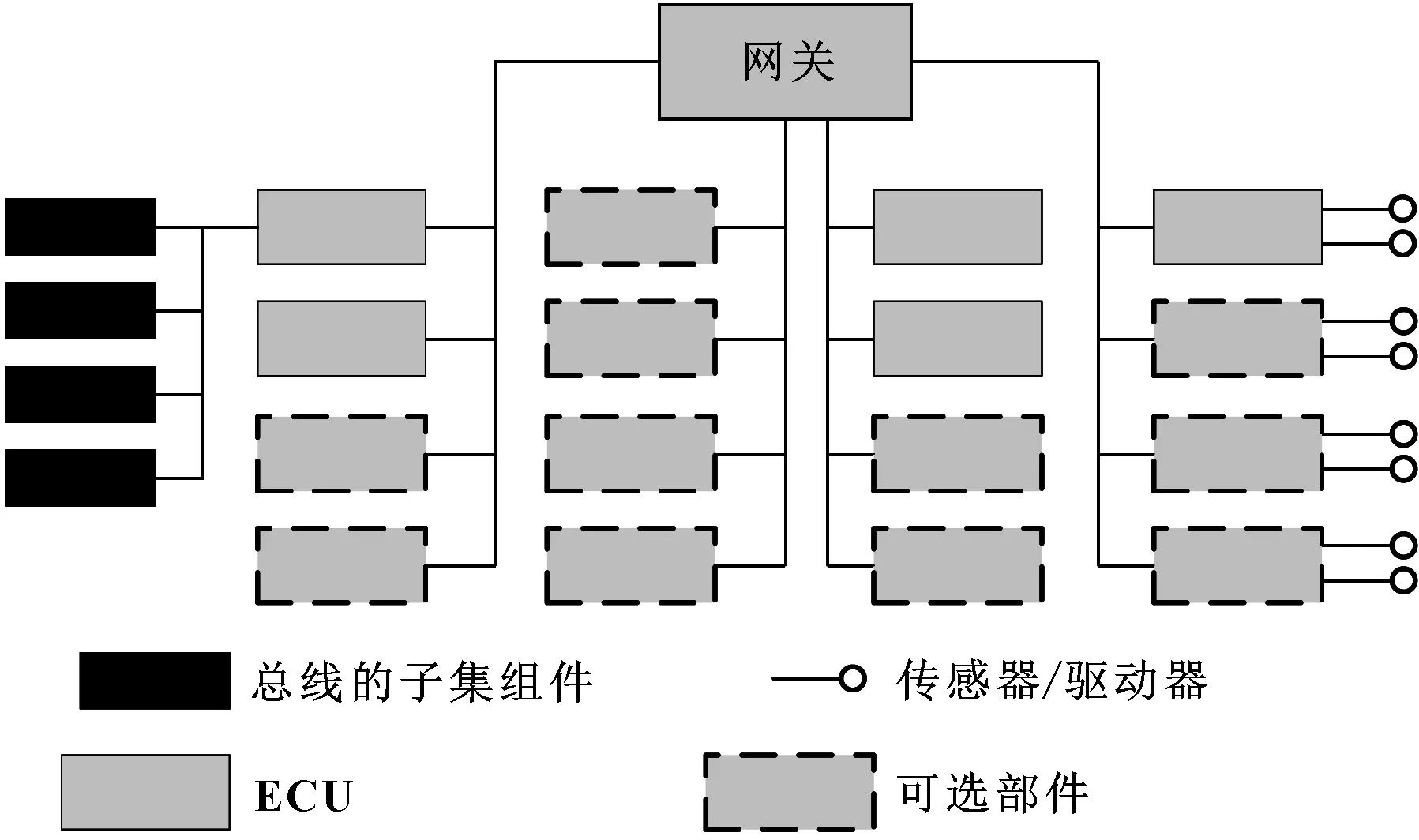
图3 具有中央网关的集中式E/E架构
一种基于功能域的架构(Domain Based Architecture)实现了网关的简化,如图4所示。ECU按其功能分组并连接到域控制器,这些域控制器通过中央网关连接。

图4 基于功能域和中央网关的E/E架构
实现网关简化的一种方法是将组件集成到功能域中,为每个域集成高性能控制器。这些控制器即域控制器,提供域内的通信和到网关的接口。这种结构由于大部分数据交换发生在功能域内,减少了ECU内部来自网关的通信。但是,对于网关建设来说,除了发生在域内的通信之外,不同域之间的信息交互也是需要考虑到的。这种架构的网关复杂程度降低,带来了更好的架构可伸缩性[5]。
自动驾驶中车辆功能的重叠增加,通信增多,网关负载会增大。为了避免这种情况,Brunner等[5]提出了区域架构(Zone Architecture),如图5所示。
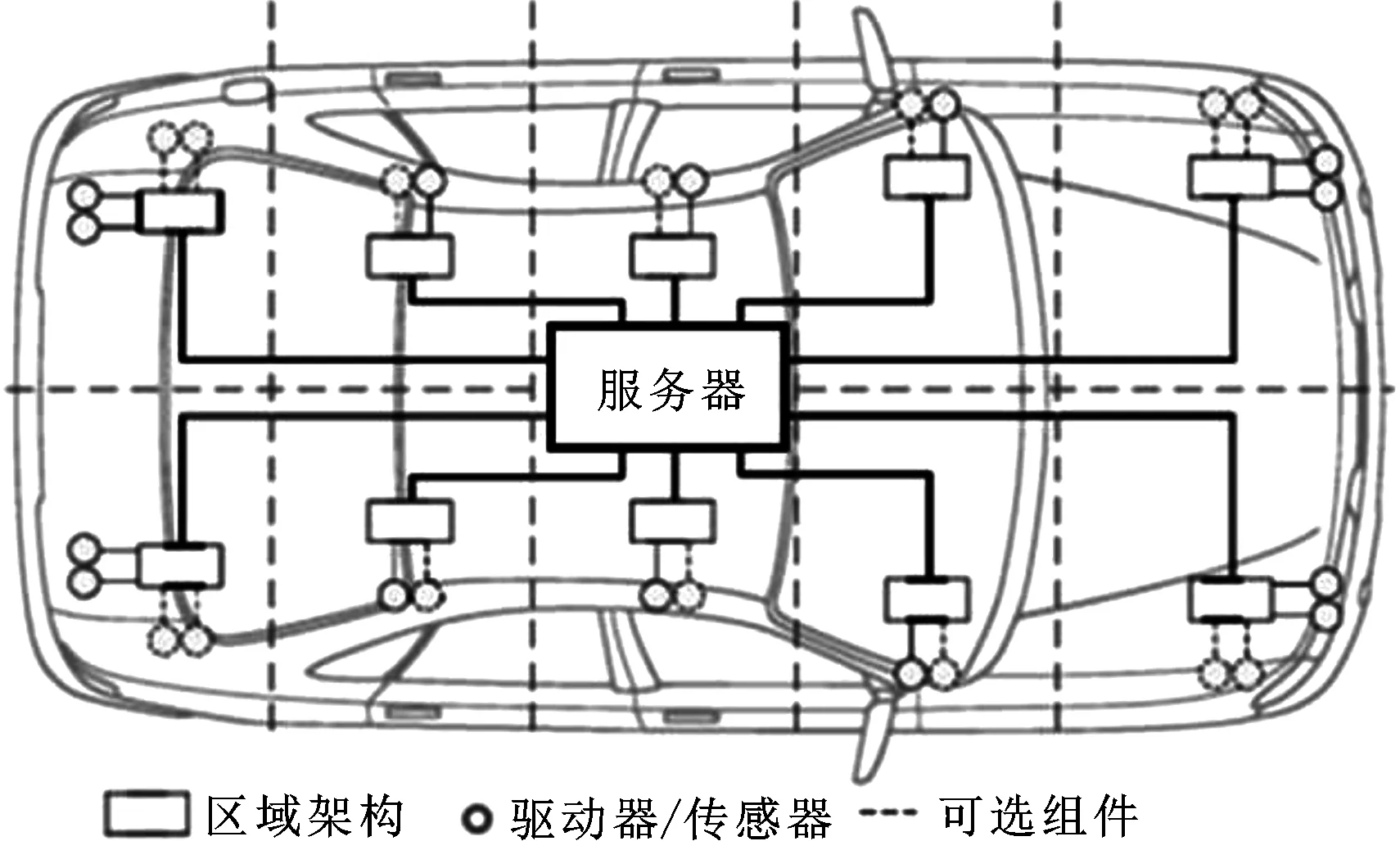
图5 具有中央服务器和区域控制器的E/E架构
除了功能域集群之外,还可以根据部件在车辆中的物理位置组成来进行整合。类似于上文中的功能域架构,车辆被分为几个区域,每个区域有一个区域控制器,区域控制器只实现转发而不进行处理,在服务器中完成处理。这些控制器会根据连接的外围组件而有所不同,来实现空间和成本的最优化。同时区域控制器还可以同时为外围组件提供通信和电力供给。
在这种架构中,服务器可以根据所需要的处理能力,为不同型号车辆设备提供灵活性的集群处理。由于只需在区域控制器外添加外围组件和在服务器中添加软件来实现集成功能,该架构具备了高度的灵活性。研究表明,该方法可降低布线成本约20%[6]。
3 车载通信网络
自动驾驶的发展以及车载信息娱乐系统的不断升级将推动车载通信网络架构及协议的变化。CAN、LIN、FlexRay、MOST等常用总线技术难以满足车联网时代复杂应用的带宽需求以及可扩展性要求。而车载以太网在带宽需求、开放性和可扩展性、物理层传输介质成本以及技术成熟性和标准化方面都有明显优势[1],它为车辆驾驶辅助、智能网联通信、高清信息娱乐及诊断高带宽、低延迟的数据传输带来了可能。
图6所示是Bosch关于通信网络协议的路线图[3],车辆中所划分的不同域根据不同的网络需求逐步转向新的协议。
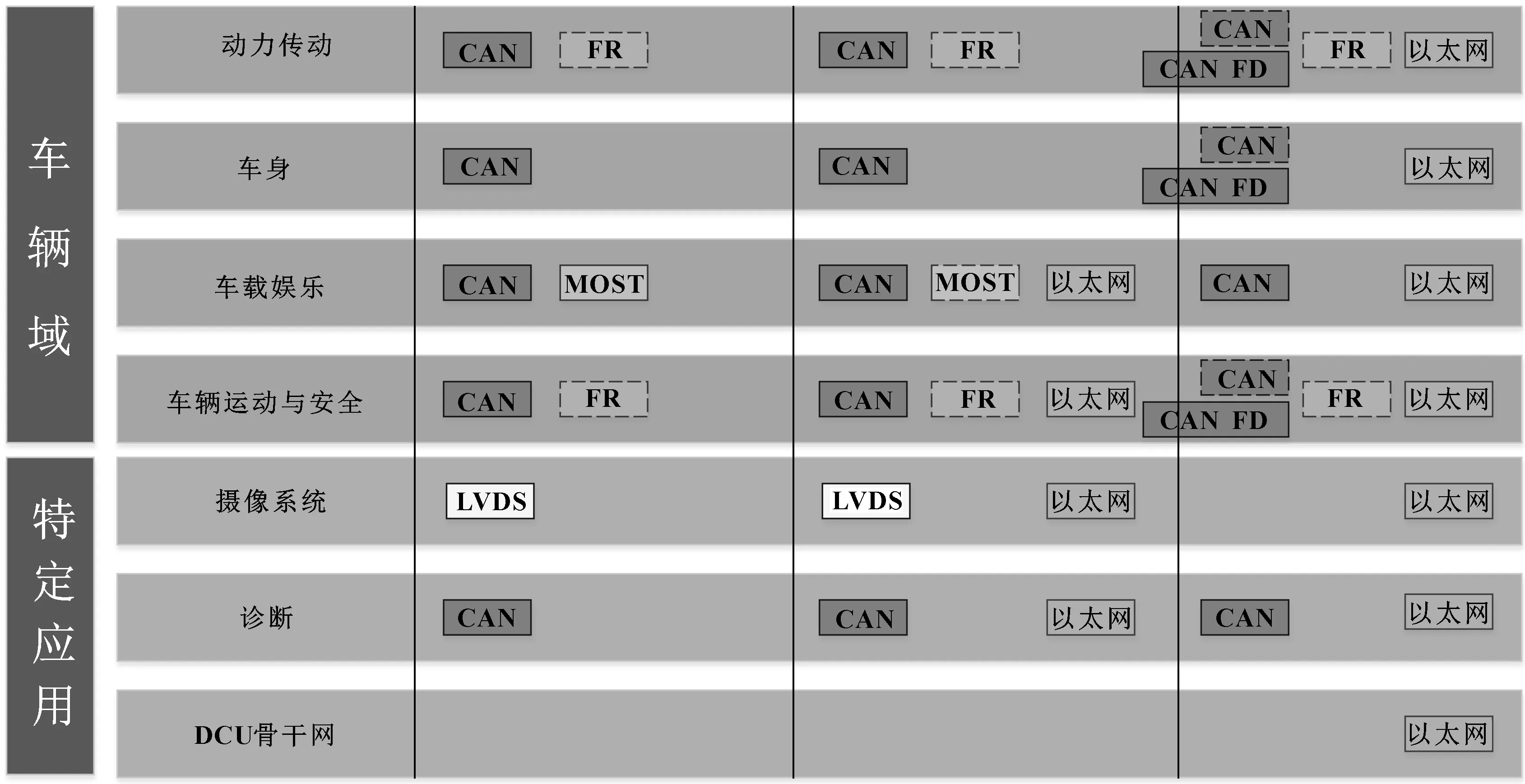
图6 Bosch车载通信网络协议路线图
4 结束语
智能网联汽车的发展所带来的基于模型的汽车电子电气架构的变革正在发生。由于高速高带宽的通信要求逐步引入了以太网在车载通信网络中的应用,越来越繁复的传感器和执行器构件也为车辆域的划分和域控制器的设计带来新的挑战,同时中央网关及高性能处理器等软硬件设备的进步也为智能网联汽车的E/E架构带来新的动力。因此,适应于自动驾驶时代的基于域控制器和车载以太网的E/E架构会是今后的研究重点。
