无人驾驶汽车的眼睛:激光雷达与机器视觉
2019-03-07王亮
王亮
(华中科技大学光学与电子信息学院,武汉 430074)
1 引言
美国高速公路安全管理局将智能汽车定义为以下五个层次[1]:完全无智能化的层次;具有特殊功能的智能化(车辆通过警告的方式反馈驾驶者执行操作,避免车祸的发生);具有多项功能的智能化;智能化汽车的第四个阶段是有限制条件下的无人驾驶;眼下我们能够看到的最远的那个阶段,全工况下的无人驾驶。在汽车智能化的各个阶段,车辆的智能化视觉系统都是最为重要的环节。感知系统分为主动系统(主动系统:通过接受自己发出信号经反射得到反馈信号,探测目标体)和被动系统(接受自然发出的信号)两种[2],两种系统各有利弊,将两种系统充分融合才能最大程度上提升性能。
LiDAR(Light Detection and Ranging)是激光探测及测距系统的简称,也称Laser Radar[3]或LADAR(Laser Detection and Ranging)[4]。通过光在空气中的传播时间来丈量发射器到目标障碍物的距离。此外,我们利用目标物表面材质不同的特性,以此通过光在表面反射强度的不同来检测环境及气候变化。按照探测的原理、探测方法不同可以分为米散射、瑞利散射、多普勒、荧光、布里渊散射等激光雷达[5]。
机器视觉则是一种综合性技术,其在智能汽车上的关键就是激光探测技术(LiDAR)。此外,除了光学上的技术,它仍要求图像处理、机械工程技术、控制、计算机技术和模拟与数字视频技术的结合。由于将机器代替人,它拥有更高的灵活性,有着更广阔的潜在价值。同时,在大批量重复性工业生产过程中,效率和自动化程度也可以通过机器视觉检测的方法大大的提高。
2 激光雷达和机器视觉的历史及应用
2.1 激光雷达
激光雷达起源于20世纪60年代初,也就是在20世纪60年代发明之后不久。激光,并结合激光聚焦成像和计算距离的能力,通过测量时间的信号返回使用适当的传感器和数据采集电子。它的第一次应用出现在气象学上。国家大气研究中心用它来测量云彩[6]。一般市民在1971年认识到激光雷达系统的准确性和有用性,即阿波罗15号当宇航员使用激光高度计绘制月球表面地图的时候。
除了军队对野外三维地理环境探测的需求,激光扫描方法还在更广阔的领域应用(如农业开发、土地利用、城市规划、交通通讯、水利工程、资源勘探、环境监测、防震减灾及国家重点建设项目等方面)。与传统的测量方法相比,低机载LIDAR地面三维数据获取方法具有后处理成本及生产数据外业成本低的优点。目前,机载LIDAR技术获取数据速度快、成本低、密集程度高、且精度高,因而它在各种测量技术中成为最为欢迎一种[7]。给国民经济、社会发展和科学研究带来了极大的便利,有着优良的发展前景。
2.2 机器视觉
20世纪60年代由美国学者罗伯兹提出机器视觉,开始是为了理解多面体组成的积木世界。而今,过去的技术在今天适也同样适用。用边缘检测技术确定轮廓线,用区域分析技术将图像划分为由灰度相近的像素组成的区域,这些技术统称为图像分割(即我们今天常见的灰度像素块。这种类似矩阵的描述方法大大简便了对物体特征的描述)[8],其目的在于用轮廓线和区域描述所分析的图像,来匹配已知库中储存的模型。
应用:①检测高精度定量的物体[9](如在机械、医学精密仪器、工程学、生物等领域应用)和检测半定量的或不用量器的定性产品(如产品的装配完全性检测、外观检查和缺陷性检测)。②机器人视觉:指令机器人的大范围操作和行动(对于小范围的运动我们还必须借助触感传感系统)。
3 激光雷达基本原理
3.1 测量系统
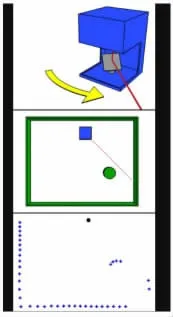
激光雷达一般由激光发射器、激光接收机、信息处理系统、控制系统和显示终端组成。一个基本的激光雷达系统包括一个由旋转镜(顶部)反射的激光测距器。激光在数字化的环境中扫描,在一个或两个维度(中间),收集在指定的角度间隔(底部)的距离测量(即与目前所接触到arduino的红外传感器类似,只不过是将红外光源换成的一种特定的波长较长且对人体不造成伤害的光源,以提高激光雷达的效率),进而通过两次(发射和接受的时间差)来判断目标的距离。基本公式:
其中,S是传感器到被目标物之间的距离;t是激光脉冲从激光器到被目标物之间的往返传输时间;c是光速。测时间的三种方法:脉冲检测法、相干检测法以及相移检测法。
对于径向速度,我们可以测量多个位移并计算其平均变化率求得速度,也可以通过反射光的多普勒频率的偏移来确定目标的径向速度。
目前激光发射光源主要有半导体激光器、半导体泵浦的固体激光器和气体激光器等。此外,激光扫描器去配合速度传感器一并使用,且将原始数据到最终报表生成需要包括以下模块:工程管理模块;数据采集模块;数据处理模块;三维显示模块;成果输出模块。
3.2 构建三维模型
为了重建道路真实场景(三维),我们将激光雷达在进步雷达上以一定的速度旋转,且激光雷达实时扫描。在扫描之后得到大量的坐标信息,并结合角速度来计算各个点的距离,这样就可以重建场景。此时用点云数据的笛卡尔直角坐标转换可以得到二维场景。在此基础上,我们将二维图像进行层层叠加组合就可以得到三维图像。
4 前景与展望
由于机器视觉的在处理信息中的便捷和加工控制信息的高集成性,在现代自动化生产中,人们在成品检验和质量控制、工况监视等领域广泛应用机器视觉系统。由于生物技术的不足,人们面临最大的困难是尚不清楚人的视觉机制,这也是机器视觉复杂的原因之一。人类无法用计算机的内省法来模拟人类的视觉过程,因此,建立机器视觉系统十分困难。但是可以预计,随着机器视觉技术的不断发展,它将在无人驾驶等领域得到得到愈加广阔的应用。
机器视觉的发展趋势:价格持续下降,功能逐渐增多,产品小型化,集成产品增多。
