基于车辆走行性能的9号直线型道岔允许通过速度研究
2019-03-07李晨钟陈嵘陈嘉胤徐井芒王平罗信伟
李晨钟,陈嵘,陈嘉胤,徐井芒,王平,罗信伟
基于车辆走行性能的9号直线型道岔允许通过速度研究
李晨钟1, 2,陈嵘1, 2,陈嘉胤1,2,徐井芒1, 2,王平1, 2,罗信伟3
(1.西南交通大学 高速铁路线路工程教育部重点实验室,四川 成都 610031;2. 西南交通大学 土木工程学院,四川 成都 610031;3. 广州地铁设计研究院有限公司,广东 广州 510010)
基于迹线法和车辆-道岔耦合动力学,考虑长期运营条件下车轮廓形磨耗,针对标准及磨耗后LM型车轮踏面和9号直线型道岔,对道岔区轮轨接触几何和车辆侧向通过道岔转辙器的走行性能展开评价,并分析9号直线型道岔的允许通过速度。研究结果表明:标准LM型踏面的轮轨接触关系优于磨耗后踏面,其允许通过速度高于磨耗后踏面。在相同的速度下运行时,标准LM型踏面的安全性,平稳性均优于磨耗踏面。在标准LM型踏面下运行,道岔侧向允许通过速度由车体横向振动加速度控制,为50 km/h;考虑实际运营条件下踏面磨耗,道岔侧向允许通过速度由脱轨系数控制,为40 km/h。
9号直线型道岔;允许通过速度;轮轨接触几何;车辆走行性能
道岔是实现车辆转线的关键轨道设备,为满足城市轨道交通“大编组、高密度”线路的行车折返需求和快慢车运营模式下越行站的设置要求,提高道岔运营效率和允许通过速度成为了必然需求。而过去对道岔允许通过速度的确定通常是基于质点运动学,其计算结果偏于保守。随着车辆−轨道耦合动力学的理论不断完善和计算机效率的不断提升,使得车辆−轨道多刚体动力学仿真计算成为可能。在不同道岔线型中,由于直线型道岔的曲尖轨工作边在尖轨与基本轨密贴段内为直线,相比于切线型和半切型道岔,车轮在通过直线型道岔时对尖轨的冲击更加突出,但由于直线尖轨加工制造简单,成本低,因此在允许通过速度不高的地段仍在大量使用。本文将针对常见的城市轨道交通9号直线型道岔,基于车辆过岔走行性能,提出道岔侧向允许通过速度。至今国内外已有许多学者通过静力分析及现场测试对车辆过岔的允许通过速度展开研究。崔景阁[1]以运动学指标作为评价标准,对提高9号道岔侧向允许通过速度进行论证;吴祖荣 等[2]提出了四次代数式导曲线和导曲线超高,通过实测机车过岔的轮轨横向力及钢轨弹性挤开程度,从而验证该优化线型可提升道岔侧向允许过岔速度。车辆−道岔耦合动力学的发展为揭示车辆与道岔系统的相互作用规律提供了有效方法[3]。孙宏友 等[4]基于车辆−道岔耦合动力学,分析了动车组和货车通过12号交叉渡线的的行车安全性和舒适性;翟婉明等[5]运用TTISIM仿真软件对不同速度下的机车通过12号提速道岔的运行安全性进行了全面仿真计算及评估分析;XU等[6]建立了多体动力学模型及有限元模型,研究了标准及磨耗踏面的车辆通过道岔的动态响应。Kassa等[7]运用GENSYS多体动力学软件并结合现场测试,分析对比了列车在不同速度下实测和仿真计算的各向动力学指标,罗赟等[8]基于SIMPACK多体动力学软件,建立了动车组及单车的变截面道岔动力学模型,并分析了两者通过18号道岔动力学性能的差别。不少学者在车辆−道岔耦合动力学的基础上展开道岔优化设计,王平等[9]以减小两侧车轮滚动圆半径差为目标函数,结合二次序列规划方法开展直基本轨廓形设计,显著提高了车辆过岔平稳性。曹洋等[10]对比了不同18号道岔线型方案下轮轨系统动力响应及其与车辆过岔速度间关系,结合动力学指标初步确定对应的道岔允许通过速度。然而,上述对道岔允许通过速度及车辆动力学特性的研究大多面向标准的车轮踏面,而鲜有考虑在实际运行磨耗作用下车轮廓形演化。本文针对标准及磨耗后车轮廓形,基于迹线法和车辆−道岔耦合动力学,分析轮轨接触几何和车辆通过道岔的动态运行行为;结合轮轨力,脱轨系数和车体加速度等指标评价车辆过岔走行性能;提出9号直线型道岔在标准及磨耗LM型踏面工况下的允许通过速度并分析控制因素,为满足城市轨道交通运量快速增长的需求提供技术 支撑。
1 轮轨接触几何
本文基于经典迹线法[11],针对9号直线型道岔和标准及磨耗踏面廓形,对滚动圆半径差、接触点对分布和道岔结构不平顺等轮轨接触几何展开 分析。
1.1 道岔及车轮廓形
图1是9号直线型道岔曲尖轨部分的关键断面道岔廓形图,通过对关键断面进行spline三次样条插值,可以得到顶宽1~71 mm、步长为1 mm的各个断面廓形。为考虑车辆服役性能的演变,采用Miniprof轮轨廓形测量仪测得300 组地铁车辆车轮廓形,通过spline三次样条插值获得车轮型面轮廓线,并对300组廓形数据进行平均化处理,得到磨耗后廓形如图2所示。图中显示车轮踏面磨耗最严重在70 mm即名义滚动圆半径处,符合实际情况。随廓形位置至名义滚动圆距离的增大,磨耗量逐渐减小,其中车轮踏面最大磨耗量为2.17 mm。
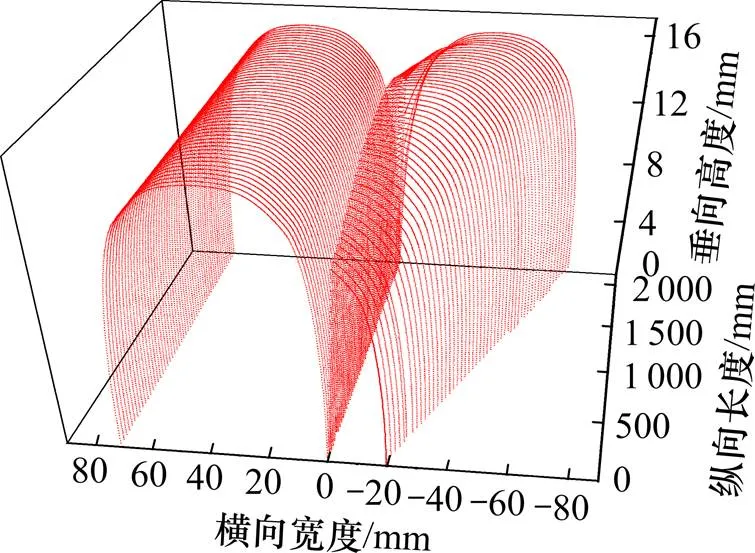
图1 曲尖轨与直基本轨组合廓形
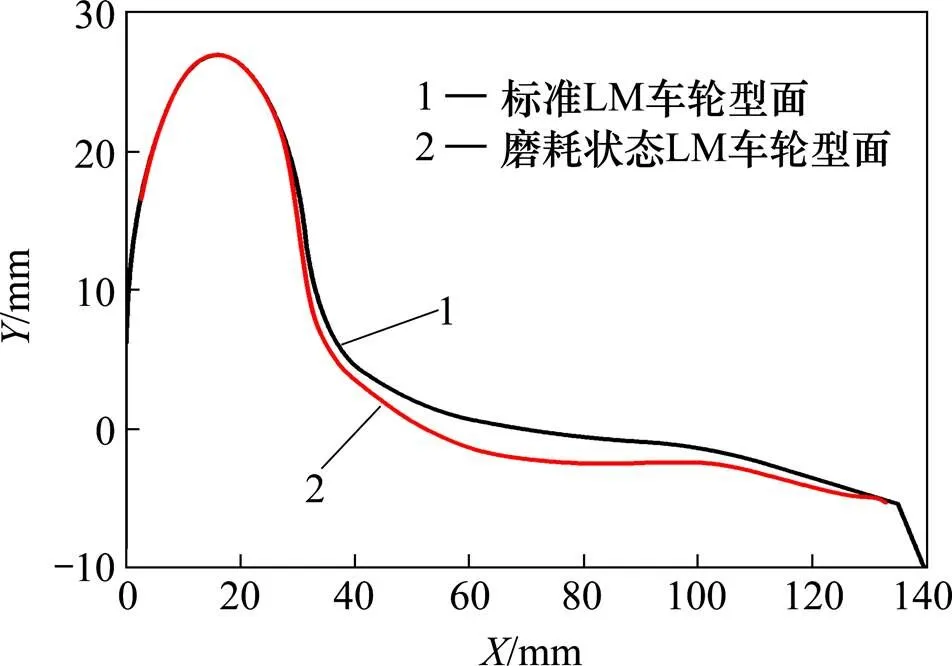
图2 标准LM踏面及磨耗踏面廓形图
1.2 车轮踏面磨耗对轮轨接触几何影响
基于迹线法,图3表示标准及磨耗后LM型踏面车轮在不同轮对横移量下,滚动圆半径差随尖轨顶宽增大的变化趋势[12]。
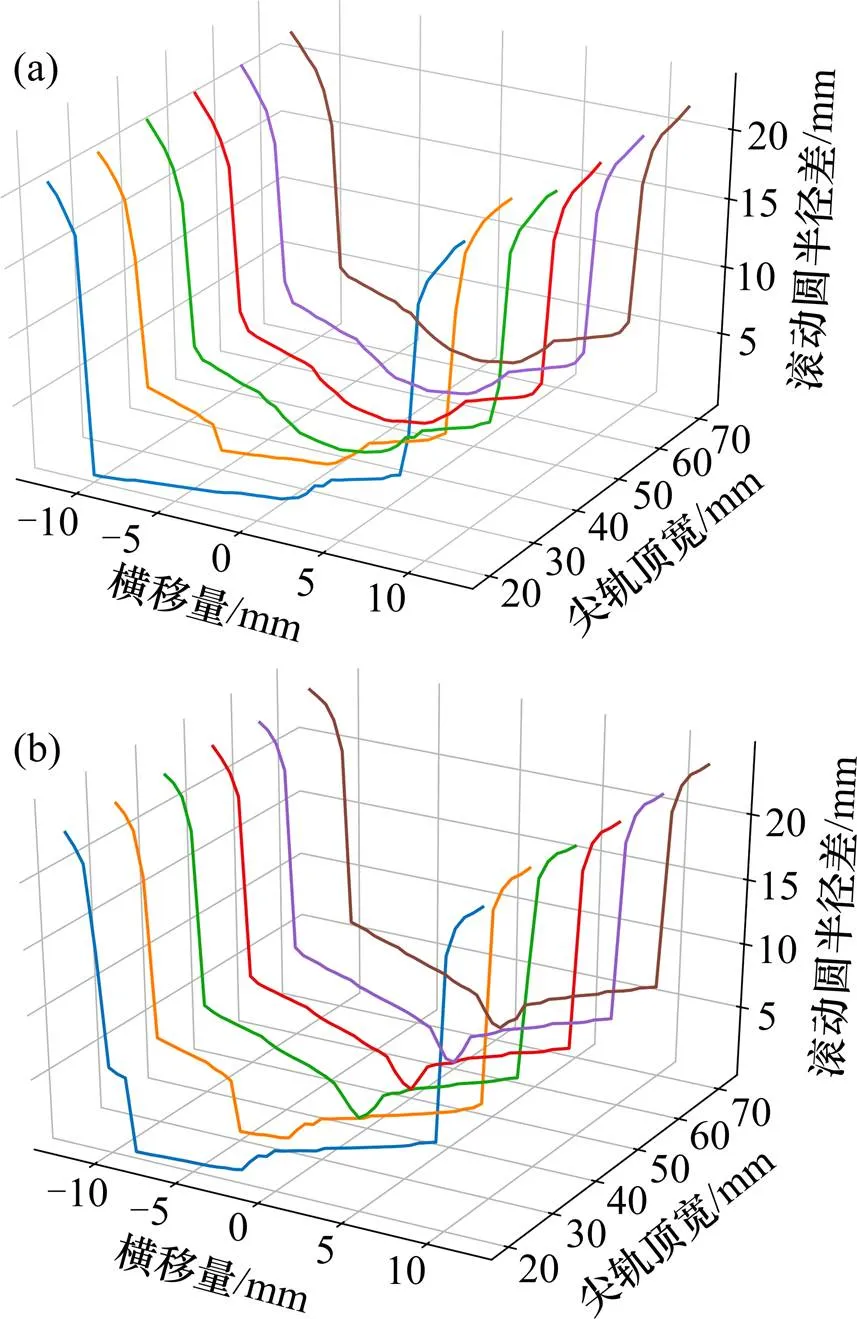
(a) 标准LM型踏面;(b) 磨耗后LM型踏面
由图中计算结果分析得出,当轮对横移量一定时,尖轨顶宽的变化对磨耗前后的滚动圆半径差影响较小。当尖轨顶宽一定时,随轮对横移量的增加,滚动圆半径差增加,且大约在轮对横移量为±10 mm处发生突变。其原因是随着轮对横移量的增加,一侧车轮轮轨接触点外移,其实际滚动圆半径增大,另一侧则相反。大约在轮对横移量为±10 mm处一侧钢轨与轮缘接触,该侧车轮滚动圆半径发生突变,因此滚动圆半径差在该处变化剧烈。对比磨耗前后滚动圆半径差,不难发现磨耗踏面的滚动圆半径差变化速率和最大值均大于标准LM型踏面,说明磨耗踏面在通过道岔时更容易由滚动圆半径差激扰而产生蛇形运动,影响其车辆运行平稳性,从而降低了该工况下的9号直线型道岔允许通过 速度。
分析图4~5的接触点对分布图发现,标准及磨耗后LM型踏面轮载过渡位置均发生在顶宽30 mm至顶宽40 mm,标准LM型踏面在顶宽35 mm处所有接触点对均在曲尖轨上,而磨耗踏面在顶宽35 mm处仍存在部分接触点对在基本轨上,说明磨耗后的轮载过渡位置较标准LM型踏面更靠后。从磨耗的角度看,延迟轮载过渡可以有效保护尖轨薄弱断面,以此减少薄弱断面的磨耗,延长道岔使用寿命。然而轮载过渡处尖轨顶宽越大,发生轮载过渡时的接触点位移变化越大,由此激扰产生的不平顺值也越大,所以磨耗踏面的平稳性相比标准LM型踏面更差。
由于尖轨沿线路采用顶面逐渐加宽,逐渐升高的结构,轮轨接触点位置不可避免地随尖轨廓形变化而变化,这种类似于区间线路的不平顺被称为道岔的“结构不平顺”。图6为在不考虑轮对横移量的情况下道岔结构不平顺计算结果。2种踏面的横向不平顺变化规律相似,曲尖轨侧轮轨接触点随着尖轨顶宽的增加而外移,横向不平顺增加。随着顶宽的继续增加,轮轨接触点从基本轨突变至尖轨,从而横向不平顺在轮载过渡位置(顶宽30~40 mm)处突变至0。标准LM型踏面的垂向不平顺在轮载过渡之前变化不明显,在轮载过渡位置处突变至最大值,轮载转移完成后渐变归0,而磨耗踏面车轮型面的磨损导致车轮廓形沿踏面方向的曲率在名义滚动圆附近变化剧烈,从而磨耗踏面的垂向不平顺在初始位置就发生突变,随后变化规律与标准LM型踏面一致。标准LM型踏面和磨耗后踏面由轮载过渡引起的横向不平顺幅值分别为34 mm和50 mm,垂向不平顺幅值变化分别为1.62 mm和2.35 mm,在磨耗的影响下,横向不平顺及垂向不平顺分别增加了47%和45%,平稳性相应降低。此外,当考虑轮对的横移量时,轮载转移点是动态变化的。由于磨耗踏面的横向不平顺幅值更大,使其轮缘更加贴近钢轨,当轮对向尖轨侧发生横移量时,磨耗踏面更容易冲击尖轨。因此,磨耗踏面的平稳性和安全性均较差。后文通过动力学仿真计算结果可以进一步证实该结论,从而确定磨耗踏面工况下9号直线型道岔的允许通过速度低于标准LM型踏面。
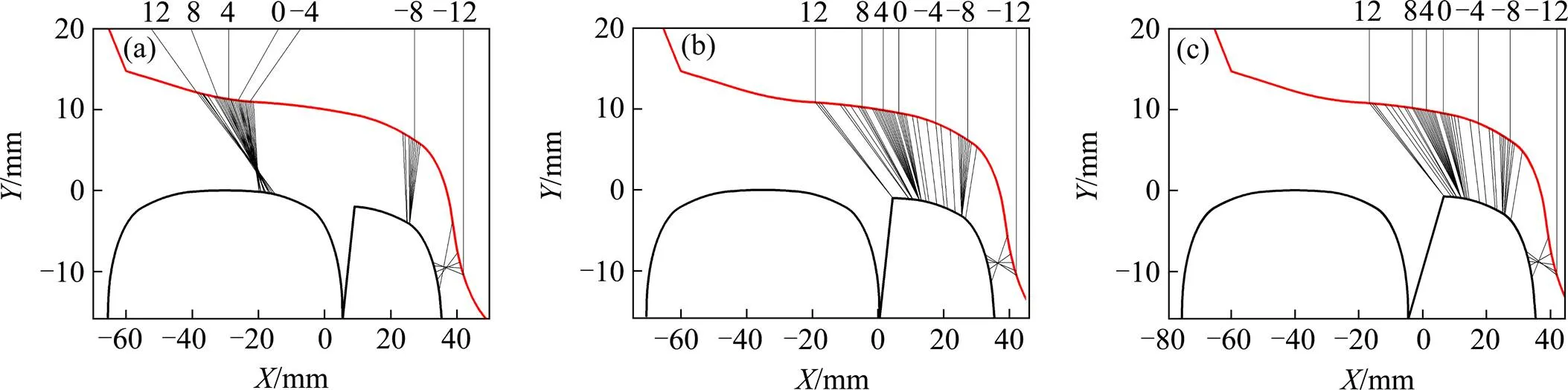
(a) 顶宽30 mm;(b) 顶宽35 mm;(c) 顶宽40 mm
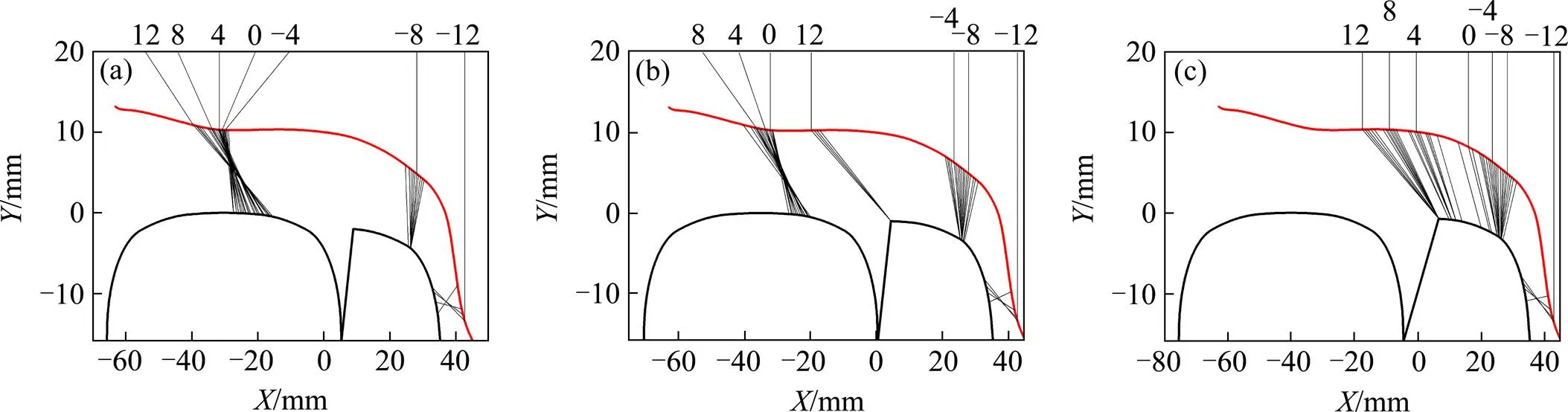
(a) 顶宽30 mm;(b) 顶宽35 mm;(c) 顶宽40 mm
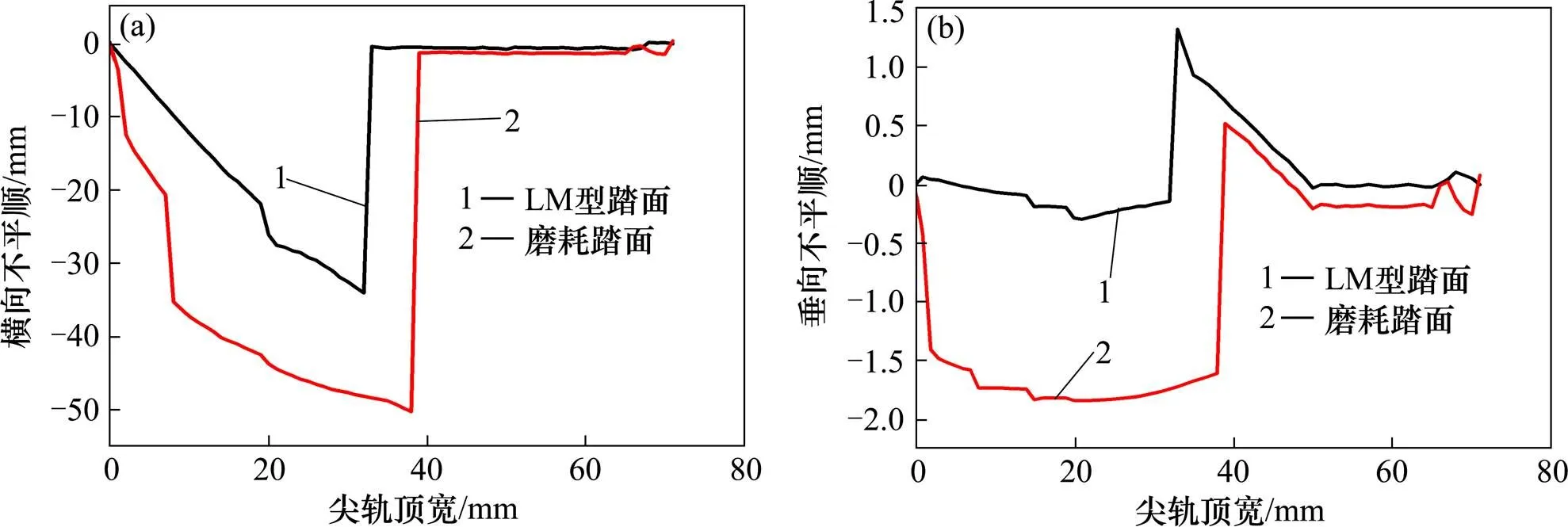
(a) 横向不平顺;(b) 垂向不平顺
2 车辆−道岔耦合动力学模型
为了准确获取轨道车辆的动力学性能,本文利用SIMPACK软件进行建模。该模型分为2部分,车辆动力学子模型和道岔动力学子模型,2个子模型之间通过轮轨接触模型进行串联[13]。
2.1 车辆模型
在模型建立过程中,将车辆主要结构部件简化为刚体,包含轮对、转向架和车体等组成部件,其中车体与两转向架之间的二系悬挂、两转向架与四轮对之间的一系悬挂均由弹簧与阻尼元件模拟,由于轮对主要运动形态为滚动,故除4个轮对刚体不考虑点头运动外,转向架和车体均考虑横移、侧滚、沉浮、点头和摇头5个自由度,因此整个车辆子系统共有31个自由度。车辆拓扑模型如图7所示,其中力元、铰接的类型及编号见图中注释。
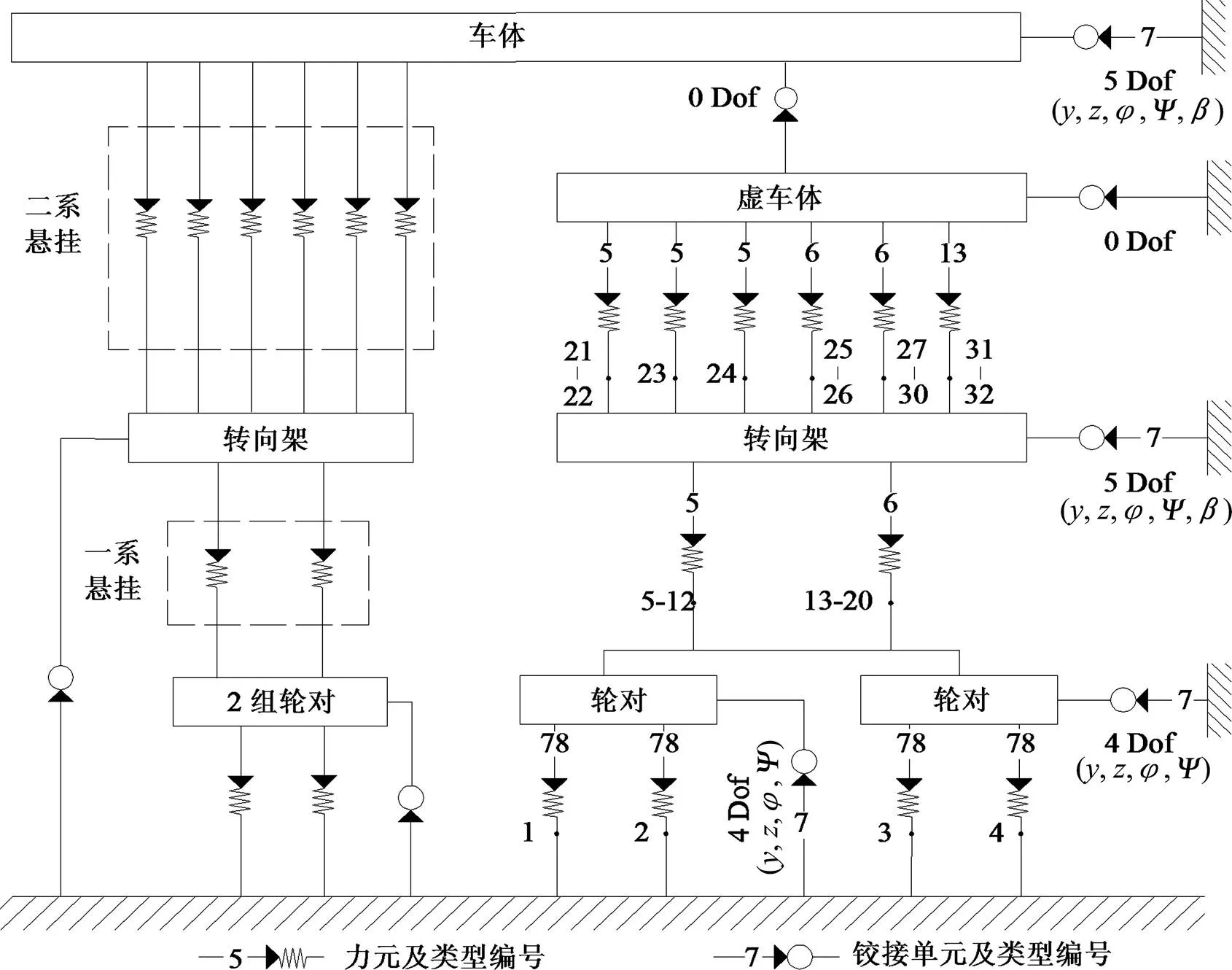
1—4轮轨力;5—12一系钢弹簧力;13—20一系垂向阻尼力;20—21二系空气弹簧力;23—牵引拉杆力;24—横向止档力;25—26二系横向减振力;27—30二系垂向减振力;31—32抗侧滚扭杆力
2.2 道岔模型
在建立道岔模型时,由于9号直线型道岔容许过岔速度较低,因此可以不考虑钢轨及道岔板的弹性,将其模拟为无质量块,只考虑道岔沿线路的廓形变化。通过选取若干顶宽的道岔截面作为关键断面,对关键断面的等距离散点之间采用Spline 3次样条插值得到沿线路纵向连续变化、顶宽间隔为1 mm的任意道岔廓形。将道岔变截面廓形及其里程文件导入SIMPACK即生成道岔模型。
2.3 轮轨接触模型
车辆模型和道岔模型之间通过轮轨接触模型连接。轮轨接触模型采用Hertz 接触理论计算法向应力,蠕滑力的计算主要是基于等效的Hertzian接触特性,并且使用Kalker简化的滚动接触的非线性理论——FASTSIM算法。SIMPACK中通过设置允许车轮抬起选项,在轮对抬起时,轮轨之间的法向力设为负值。如果轮对瞬时脱离轨道,SIMPACK停止刚性的法向力计算程序(通过状态向量求解约束力得到轮轨法向力),并且调用弹性的接触模型,在轮轨间建立弹簧−阻尼力元件,法向力通过轮轨相对位移及速度实时计算确定。
3 车辆过岔走行性能
折返线道岔以车辆侧向过岔为主,其侧向允许通过速度显著影响城市轨道交通运输效率。相比于切线型和半切型道岔,直线型道岔制造简单、便于更换,其尖轨工作边成一直线,尖端角、转辙角和冲击角相等,车辆对尖轨的冲击力更大。其次,对9号道岔,车辆侧向过岔时速度较低,对辙叉撞击较小,转辙器区轮轨动力响应和车辆走行性能的变化比辙叉区更剧烈。考虑到9号道岔的侧向通过速度主要由转辙器和导曲线部分控制[14],本节针对车辆通过转辙器的走行性能展开分析。利用车辆−道岔耦合动力学模型分别对标准及磨耗后LM型踏面在3种速度下进行模拟,因为车辆各轮轴的振动响应相似,所以只取第一轮对计算结果进行分析。通过分析轮轨横向力,轮轨垂向力,安全性指标(脱轨系数、轮重减载率),平稳性指标(车体横向和垂向振动加速度)评价车辆过岔安全性及平稳性。
由于本文中模型只针对转辙器部分,很少出现轮轨分离现象,且不考虑轨道不平顺激励作用。因此文中用轮重减载率指标作为轮轨分离评判标准。根据规范规定,轮重减载率低于0.8能够保证车辆运行安全性,通过仿真计算结果可知,标准LM型和磨耗踏面2种工况下,车辆达到允许通过速度后轮重减载率最大值均未超限。
3.1 标准LM型踏面
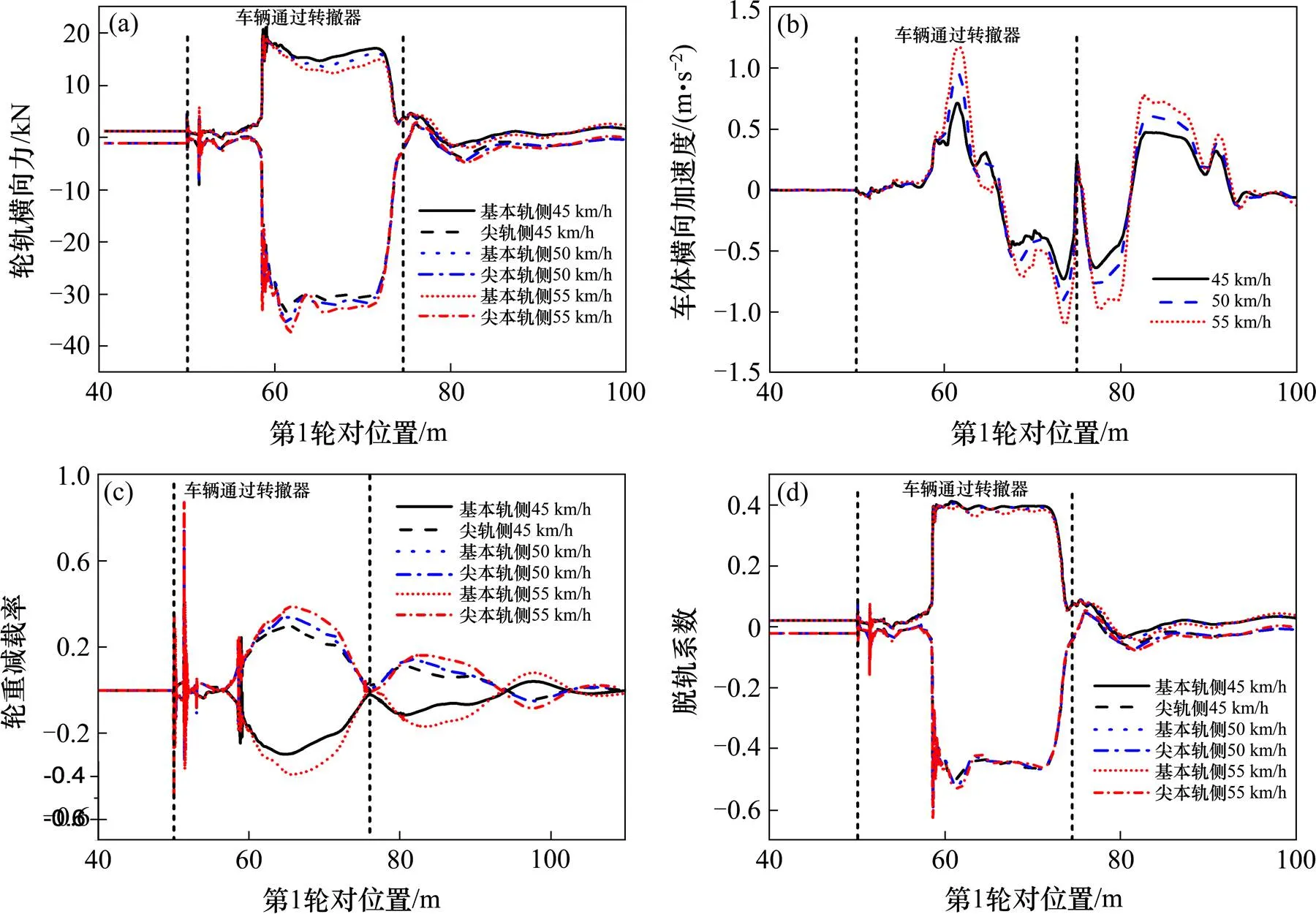
9号直线型道岔转辙器部分6.448 m,车辆全轴距18.5 m,因此车辆从第1轮对进入转辙器到完全离开大约通过25 m。标准LM型踏面动力学部分指标计算结果如图8所示。结果表明,随着速度的不断增大,车辆侧向通过直线型9号道岔的安全性及平稳性降低。横向力、横向加速度及脱轨系数的变化主要是由于车辆在通过道岔时未被平衡离心力累积引起的,因此车辆第1轮对初始进入转辙器时产生较小冲击响应,而当车体中心位置完全进入转辙器后即第1轮对到达60 m附近时横向力、横向加速度及脱轨系数突变至最大值,车辆通过轮载过渡位置以后直到完全通过导曲线部分之前,轮轨横向力和脱轨系数没有较大的波动,完全通过导曲线部分后横向力,横向加速度,脱轨系数均恢复稳定。轮重减载率的产生主要是由于在轮轨撞击力和离心力的作用下,两侧钢轨的轮轨垂向力在静轮重值上下波动。当第1轮对初始进入转辙器部分时,由于尖轨撞击及轮载过渡的作用,轮轨垂向力有较大的突变,因此轮重减载率在该处达到最大值。此后通过导曲线部分时,在离心力的作用下,尖轨侧轮轨垂向力增载,基本轨侧减载,轮重减载率绝对值呈递减趋势不断波动,趋于稳定后回到零点附近。
表2结果显示,随着速度从45 km/h增加到55 km/h,标准LM型踏面工况下的动力学各项指标均增加,其中横向加速度变化最敏感,增加了60.3%;轮轨横向力变化最不敏感,增加了11.6%。车辆以3种速度侧向通过转辙器时的安全性指标均未超过国家规定的安全限值;当车辆以55 km/h侧向过岔时,车体横向加速度指标超过限值,过岔平稳性较差。为保证车辆侧向过岔时安全性及平稳性,标准LM型踏面下既有9号直线型道岔最高侧向通过速度50 km/h。
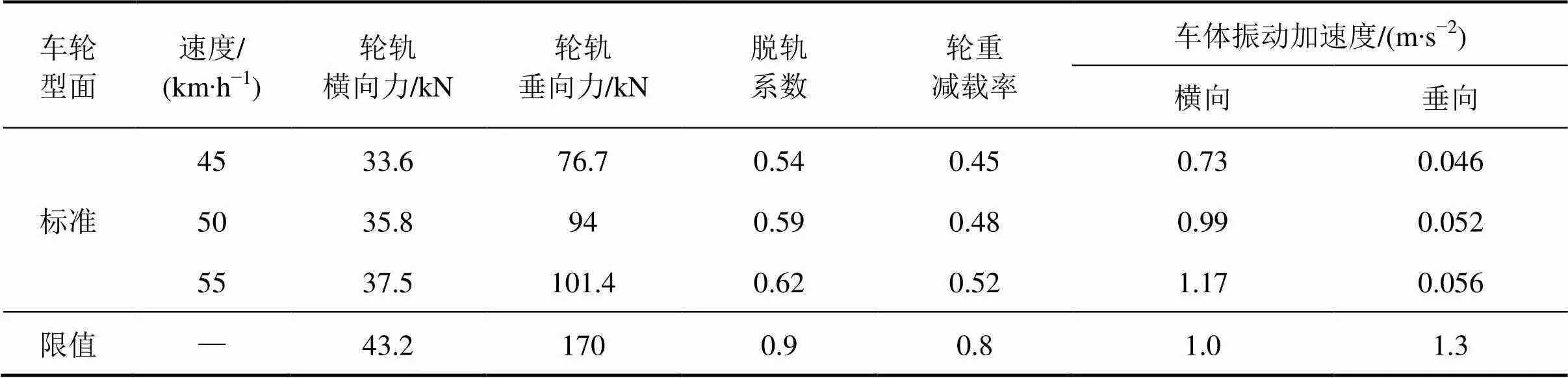
表2 标准LM型踏面动力学指标结果汇总
3.2 磨耗后踏面
图9为磨耗踏面工况下部分动力学指标计算结果。对比图8发现,2种车轮踏面在3种速度下动力学指标的变化规律基本一致。磨耗踏面由于在长期服役下轮轨廓形共形程度较高,导致该工况下第1轮对初始进入转辙器位置处轮轨垂向力较小,因此相较于标准LM型踏面而言,磨耗踏面的轮重减载率和脱轨系数值较大。根据表3各项指标统计结果,车辆侧向通过道岔的安全性及平稳性指标随着速度的增大而增大。车辆以35 km/h及40 km/h侧向通过道岔尖轨时的安全性、平稳性指标均未超过国家规定的安全限值,车辆以45 km/h侧向过岔时的脱轨系数超过国家规定限值。为保证车辆侧向过岔时安全性及平稳性,在磨耗车轮运行下既有9号直线尖轨道岔最高侧向通过速度为40 km/h。
对比表2和表3发现,当车辆以相同速度(45 km/h)下侧向过岔时,磨耗踏面工况下安全性指标已经超过限值,而标准LM型踏面的车辆走行性能良好,直到车辆通过速度为55 km/h时其平稳性指标超过限制,标准及磨耗LM型踏面2种工况下的9号直线型道岔允许通过速度的控制因素分别为平稳性指标和安全性指标。且磨耗踏面工况下的车辆走行性能及允许通过速度均低于标准LM型踏面。
(a) 轮轨横向力;(b) 横向加速度;(c) 轮重减载率;(d) 脱轨系数
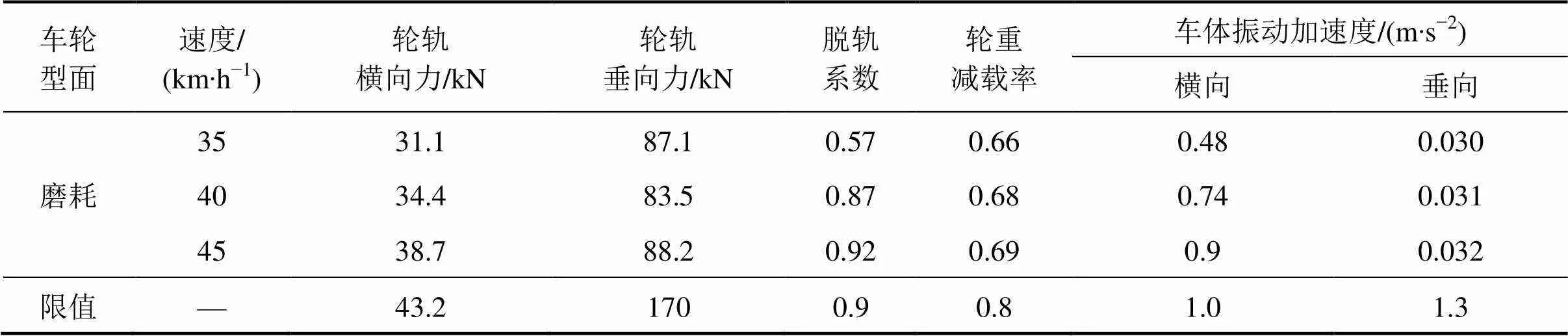
表3 磨耗踏面动力学指标结果汇总
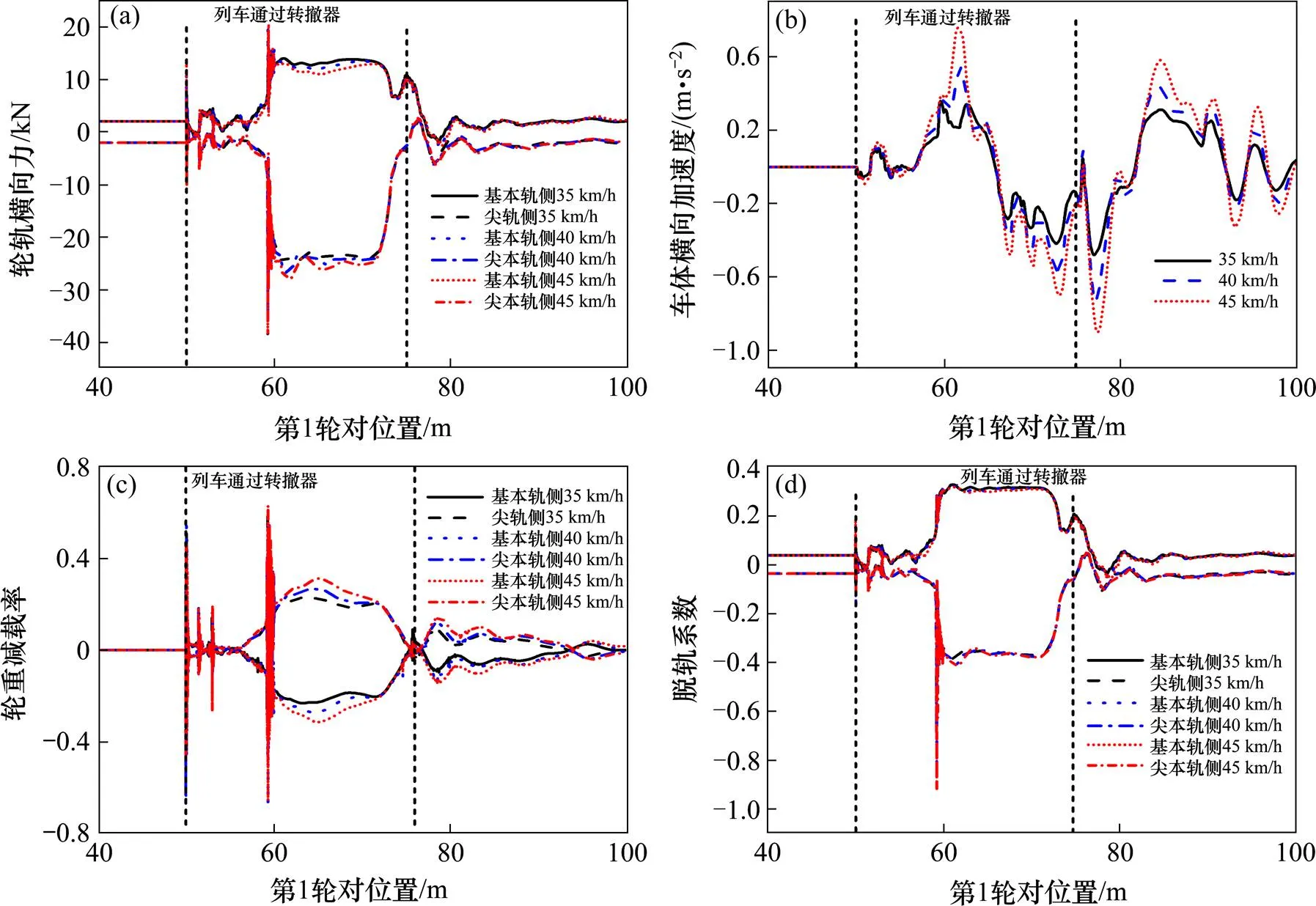
(a) 轮轨横向力;(b) 横向加速度;(c) 轮重减载率;(d) 脱轨系数
4 结论
1) 静态轮轨接触几何计算结果表明,相比较标准LM型踏面而言,磨耗后踏面的滚动圆半径差的最大值和变化速率更大,轮载过渡位置更靠后,且在轮载过渡处由轮载转移激扰引起的结构不平顺幅值更大。磨耗踏面过岔更容易冲击尖轨,其过岔安全性、平稳性均低于标准LM型踏面。
2) 动力学计算结果表明,9号直线型道岔在标准及磨耗后LM型踏面运行下的允许通过速度分别由舒适性指标中的车体横向加速度及安全性指标中的脱轨系数控制,且车辆在相同运行速度下,标准LM型踏面工况下的车辆走行性能及各项动力学指标均优于磨耗踏面工况。因此,标准LM型踏面工况下的允许通过速度高于磨耗后踏面。
3) 踏面磨耗影响车辆过岔的走行性能,从而降低其允许通过速度。因此,为了保证车辆过岔的安全性及平稳性,针对不同的轮轨匹配工况,提出合理的道岔侧向允许通过速度。9号道岔在标准LM型踏面下允许通过速度为50 km/h,磨耗踏面下允许通过速度为40 km/h。
[1] 崔景阁. 北京地铁9号道岔提高侧向允许通过速度的论证[J]. 都市快轨交通, 2015, 28(2): 102−105. CUI Jingge.Demonstration of increasing permissible side track velocity on No.9 turnout in Beijing subway[J]. Urban Rapid Rail Transit, 2015, 28(2): 102−105.
[2] 吴祖荣, 姚晓平, 管天保. 提高12号道岔侧向过岔速度的有效途径[J]. 铁道学报, 1988, 10(2): 121−125. WU Zurong, YAO Xiaoping, GUAN Tianbao. Effective ways to increase the side track velocity of No.12 turnout[J]. Journal of the China Railway Society, 1988, 10(2): 121−125.
[3] 王平, 陈嵘, 徐井芒, 等. 高速铁路道岔系统理论与工程实践研究综述[J]. 西南交通大学学报, 2016, 51(2): 357−372. WANG Ping, CHEN Rong, XU Jingmang, et al.Theories and engineering practices of high-speed railway turnout system: survey and review[J]. Journal of Southwest Jiaotong University, 2016, 51(2): 357−372.
[4] 孙宏友, 王平, 张东风, 等. 动车组与货车侧向通过整体道床12号交叉渡线道岔动力学特性分析[J]. 铁道标准设计, 2015, 59(5): 70−73. SUN Hongyou, WANG Ping, ZHANG Dongfeng, et al.Dynamics analysis of emus and freight car passing through No.12 crossover turnout with solid bed[J]. Railway Standard Design, 2015, 59(5): 70−73.
[5] 翟婉明, 王开云. 机车车辆侧向通过道岔时的运行安全性评估[J]. 同济大学学报(自然科学版), 2004(3): 382−386. ZHAI Wanming, WANG Kaiyun.Safety assessment of trains passing through branch lines of turnouts[J]. Journal of Tongji University (Natural Science), 2004(3): 382− 386.
[6] XU Jingmang, WANG Ping, WANG Li, et al. Effects of profile wear on wheel-rail contact conditions and dynamic interaction of vehicle and turnout[J]. Advances in Mechanical Engineering, 2016, 8(1): 1−14.
[7] Kassa E, Nielsen J C O. Dynamic interaction between train and railway turnout: full-scale field test and validation of simulation models[J]. Vehicle System Dynamics, 2008, 46(Suppl 1): 521−534.
[8] 罗赟, 吴安伟. 动车组与单节车侧向通过道岔动力学性能比较[J]. 机车电传动, 2007(1): 5−7. LUO Yun, WU Anwei. Comparison between dynamic performances of EMUs and single locomotive when passing a turnout[J]. Electric Drive for Locomotives, 2007(1): 5−7.
[9] WANG P, MA X, WANG J, et al. Optimization of rail profiles to improve vehicle running stability in switch panel of high-speed railway turnouts[J]. Mathematical Problems in Engineering, 2017: 1−13.
[10] 曹洋, 王平, 杨生. 道岔平面选型的动力学研究[J]. 华中科技大学学报(自然科学版), 2017, 45(11): 35−40. CAO Yang, WANG Ping, YANG Sheng. Dynamics study on turnout plane alignment selection[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(11): 35−40.
[11] 王开文. 车轮接触点迹线及轮轨接触几何参数的计算[J]. 西南交通大学学报, 1984(1): 89−99. WANG Kaiwen. Calculation of wheel contact point trace and wheel track contact geometric parameters[J]. Journal of Southwest Jiaotong University, 1984(1): 89−99.
[12] Elias K, Clas A, Nielsen J O. Simulation of dynamic interaction between train and railway turnout[J]. Vehicle System Dynamics, 2006, 44(3): 247−258.
[13] CHEN Rong, CHEN Jiayin, WANG Ping, et al. Numerical investigation on wheel-turnout rail dynamic interaction excited by wheel diameter difference in high-speed railway[J]. Journal of Zhejiang University- Science A (Applied Physics & Engineering), 2017, 18(8): 660−676.
[14] 王平. 高速铁路道岔设计理论与实践[M]. 2版. 成都:西南交通大学出版社, 2015: 43−44. WANG Ping.Design of high-speed railway turnouts: theory and applications[M].2nd ed. Chengdu: Southwest Jiaotong University Press, 2015: 43−44.
Research on the permissible velocity of No.9 straight switch rail based on the vehicle running behavior
LI Chenzhong1, 2, CHEN Rong1, 2, CHEN Jiayin1, 2, XU Jinmang1, 2, WANG Ping1, 2, LUO Xinwei3
(1. MOE Key Laboratory of High-speed Railway Engineering, Southwest Jiaotong University, Chengdu 610031, China; 2. School of Civil Engineering, Southwest Jiaotong University, Chengdu 610031, China; 3. Guangzhou Metro Design & Research Institute Co., Ltd, Guangzhou 510010, China)
This paper evaluated the wheel/rail contact geometry and running behavior on the turnout area when vehicle pass the switch by side way, based on the trace method and vehicles-switch coupling dynamics, considering on the wheel profiles evolution in the long-term operating conditions, according to the standard and wear LM wheel tread and No. 9 straight switch rail. The results show that the wheel/rail contact relations of the standard LM tread are better than that of the wear tread, and its permissible velocity is higher than the wear tread. When running at the same speed, the safety of the standard LM tread is better than the wear tread. The permissible side track velocity on turnout under the standard LM tread is controlled by lateral vibration acceleration of the vehicle body, which is 50 km/h; Considering the wear under actual operating conditions, the permissible velocity of the side track on turnout will be controlled by the derailment coefficient, which is 40 km/h.
No. 9 straight switch rail; permissible velocity; wheel/rail contact geometry; vehicle’s running behavior
10.19713/j.cnki.43−1423/u.2019.02.008
U213.2
A
1672 − 7029(2019)02 − 0332 − 09
2018−03−09
国家重点研发计划资助项目(2017YFB1201102)
徐井芒(1987−),男,河北清河人,讲师,博士,从事高速重载轨道结构及轨道动力学研究;E−mail:mang080887@163.com
(编辑 涂鹏)
