基于小波分解的客运列车车号定位及阈值分割∗
2019-03-01辛明远梅劲松蒋银男
辛明远 梅劲松 蒋银男
(1.南京航空航天大学自动化学院 南京 211106)(2.南京拓控信息科技股份有限公司 南京 210019)
1 引言
近年来,随着我国铁路建设快速发展,铁路成为了更多人的出行选择,铁路车辆的日常检修随之变得尤为重要。各种检修数据通常以车号为索引进行存储和调用,快速而准确的车号定位算法是车号识别系统的基础。车号区域由于光照、背景等影响会导致图像中含有大量干扰。因此,定位算法的关键就是要有较好的鲁棒性。目前已有的定位方法有投影法[1]、基于颜色及形态学的车号定位[2~3]、基于笔画宽度变换的车号定位[4]等,但是对复杂光照下的多型车厢的客运列车车号定位没有讨论。
针对此问题,根据车号纹理特点,本文提出了一种基于小波分解的定位算法,提高了复杂光照下的多种车号定位的准确率,具有较好的鲁棒性。对提取的车号图像采用基于局部灰度特性[5~7]的阈值分割方法,并结合连通域个数指导最终阈值分割,相比于传统的二值化方法获得了较好的效果。
2 图像预处理与车号纹理分析
本文研究对象是客运列车车号彩色图像,尺寸为500×375,如图1所示,由于列车检修大都在晚上,图像不仅颜色不同,而且由于光线的影响,导致车号区域光照不均匀,并存在一些噪点。为了提高车号定位精度,需对原始图像进行预处理。本文预处理主要包括灰度化、中值滤波和拉普拉斯锐化,之后对预处理图像车号区域进行纹理分析,研究车号区域纹理特点。

图1 原始图像
2.1 图像预处理
首先,将采集到的彩色图像转化为灰度图像,本文采用经典的加权平均值法实现灰度化,将RGB图像转化为YUV图像,一般提取Y分量实现灰度化,YUV空间与RGB空间的转换关系常表示如下:

由于光照不均匀,车号区域对比度不强,导致车号的定位、分割等处理难以进行,为了增加对比度,需对图像锐化处理,本文采用拉普拉斯锐化方法增加对比度。
拉普拉斯算子是一种各向同性微分算子,适合改善因为光线漫反射造成的图像模糊,在二维情况下,离散的拉普拉斯算子表达式为

上式等号右边两项分别表示x方向和y的二阶差分,进一步有

实验结果如下,对比发现,图3车号轮廓更加清晰,对比度高且噪点减少。
图2 灰度图像

图3 预处理结果
2.2 车号区域纹理分析
根据客运列车车号涂刷标准可知,车号区域纵向边缘比较丰富,其他区域如车窗部分水平边缘比较丰富,车号区域等细节信息包含在图像的高频部分,以下是关于预处理后的车号区域纹理分析的实验,取x=190(x∈1∶375)(图3车号区域中间位置)的一条数据线,采用小波分解[8]进行纹理分析,采用哈尔小波对该条数据线进行多层分解后发现车号区域是一个高频纹理区,在前3层的分解中,车号区域纹理特征明显,较容易分离出来,第4层及第4层后的干扰逐渐增多,高频特性逐渐变弱,实验结果如图4所示。
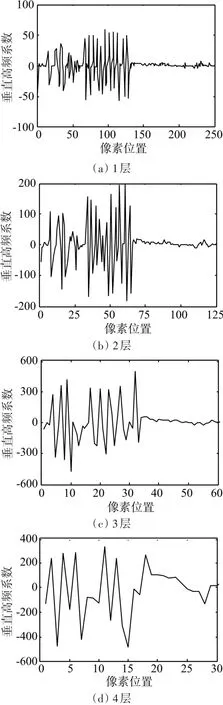
图4 车号区域垂直高频特性变化
3 车号的定位及其二值化
由于客运列车车身及车号颜色较多,光照变化较大,传统的定位算法效果往往不太理想,本文引入小波分解及形态学处理[9~10]完成车号定位,并采用基于局部灰度均值和标准差的二值化算法,对车号进行阈值分割。
3.1 车号定位
根据车号区域纹理分析实验,本文对预处理后的车号图像选择两层分解的细节信号进行车号定位,算法步骤描述如下:
1)使用哈尔小波对预处理图像进行两层分解提取垂直高频分量;
2)使用改进的 Canny边缘检测算法[11]进行边缘检测;
3)形态学处理,使用线性算子进行闭运算[12~13],使检测的边缘信息连接成连通区域,根据图像中车号长度和实验,选取的线性算子为[1,1,1,1,1,1,1,1,1,1,1];
4)根据客运列车车号的喷刷规则以及实际采集图像中的车号长宽等先验知识,结合小波分解图像尺寸变换关系,采用最小外接矩形分割,将满足约束条件的区域提取出来,完成车号的定位。约束条件:车号尺寸250×50,长和宽的误差分别为5个像素。
该算法有效克服了光照不均匀及不同颜色对于车号定位的影响,实验结果如图5所示,其中,图(a)是经过小波分解得到的图像,可见车号纹理清晰,其他区域边缘信息则被弱化,噪点减少;图(b)和(c)是边缘检测的图像,未改进前边缘检测易发生断裂,改进后边缘信息更完整;图(d)是采用线性算子经过闭运算后得到的图像;图(e)是采用最小外接矩形分割并结合先验知识得到的定位结果。
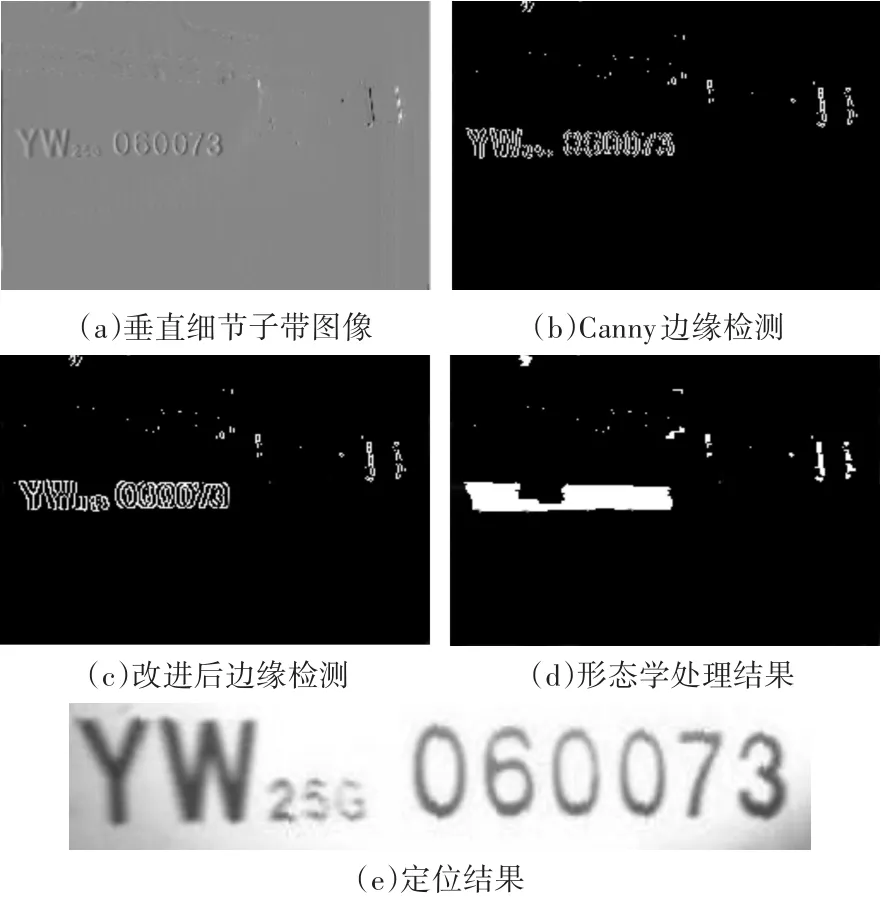
图5 车号定位
3.2 车号的阈值分割
阈值分割的作用是将客运列车车号与背景分割开来,是车号字符分割与识别前非常重要的一步。常用的方法一般可分为全局阈值法和局部阈值法,二者的典型代表是大津法[14~15]和 Niblack法。通过对比,本文采用基于局部灰度均值和标准差的二值化算法对提取的车号图像进行阈值处理,其原理为对图像中(x,y)处的点,在它的R×R邻域内,计算邻域内灰度均值m(x,y)和标准差s(x,y),然后用下式计算阈值进行分割:

式中K是修正系数。
此外,由于客运列车车号颜色与车厢颜色有多种,经过阈值处理后,字符灰度值不统一,而且Niblack算法虽然突出了细节,但有时阈值处理后会出现干扰。针对此问题,本文提出一种连通域个数指导阈值分割的算法,得到车号字符灰度值统一的图像,并去除初次阈值处理后产生的干扰。算法步骤描述如下:
1)采用Niblack法对提取出的车号灰度图进行初次阈值处理,根据大量实验,窗口大小R=7,K=0.7;
2)采用最小外接矩形分割,记分割出的连通域数为num,用来指导初次阈值处理图像是否进行颜色翻转,考虑到字符之间有时会出现粘连并根据实验,如果num<10,进行翻转处理,如果num≥10,不进行处理;
3)遍历每个连通域的最小外接矩形,根据车号涂刷规则等先验知识模块,将干扰去除,得到阈值处理最终图像。
实验结果如图6所示,图(a)是定位结果;图(b)是采用大津法得到的阈值分割图像,字符容易发生断裂;图(c)是采用Niblack法并进行翻转得到的图像,可见车号字符二值化效果较好,但有时会出现一些干扰;图(d)是本文方法得到的最终阈值分割结果,可见符合字符分割识别要求,且不含干扰。

图6 车号的阈值分割
4 实验分析
为了验证本文算法的有效性,从某机务段现场采集了700张含有车号的图片作为验证集,涵盖了我国主力客运列车车厢,除了前述车型的车号图像,图7展示了另外两种具有代表性的车号图像及其定位和阈值分割结果,可见,在多种车厢及复杂光照下,定位及二值化效果较好。

图7 样本图片及处理结果
表1对比了投影法、基于颜色及形态学的定位算法,本文算法在定位精度及漏检率方面具有一定优势。

表1 试验对比结果
5 结语
本文提出了一种基于小波分解的客运列车车号定位及阈值分割方法,相对于传统方法有以下三点改进:1)在预处理阶段,采用拉普拉斯锐化算法,增加灰度图像对比度;2)引入小波分解提取垂直高频分量,并采用改进的Canny边缘检测算法,突出车号纹理特征,降低干扰;3)在阈值分割阶段,本文提出一种以连通域个数指导最终阈值分割的方法,并引入先验知识去除局部自适应阈值分割产生的干扰。实验结果表明,在应对不同颜色的多种车型、光照变化等影响因素时,定位及阈值分割有较好的鲁棒性。
