基于CAN总线的纯电动汽车故障诊断策略分析
2019-02-21□邓宁
□邓 宁
一、CAN总线概述以及特点分析
(一)CAN总线概述。控制器局域网,简称CAN,是目前在国际范围内应用最广的现场总线。它主要存在于汽车环境中,具有一定的通讯控制功能。同时通过以汽车内部控制装置ECU为载体对各类信息进行交换的过程,则可以建立起专门的控制系统。一般来讲在汽车内部发动机的管理系统、变速箱控制器等当中,均置入了CAN控制装置。
(二)CAN总线特点。第一,CAN总线中的任一网络节点在向网络中其他节点进行传递信息的过程中,有较高的灵活性,并且受外界因素影响较小,不用在固定地址中等待节点信息的传递,因此在进行多机备份系统构建过程中,就可以对此特点加以运用,具有较大的便利性;第二,CAN网络中的节点信息被分成不同等级或层次,使得对其使用的过程中更具有针对性,从而更好地满足相关运行工作的需求;第三,CAN网络以优先级为基础,采用不具备破坏性的仲裁技术,当CAN网络中各个节点在某时间段内同时输送信息时,优先等级低的网络节点就会自动退出信息输送过程,为优先等级高的网络节点节省一定的网络空间,而优先等级高的网络节点就会继续进行信息的传送,这样即使CAN网络所处网络环境不理想,也不至于发生网络瘫痪的情况。另外,CAN网络中的节点如果处于错误的运行环境中,那么它还具有一定的自我关闭功能,有效避免了因信息传送错误对其他网络节点的操作产生影响。然后,CAN中的网络节点数量多少直接受驱动电路的影响,据了解,目前CAN网络节点的数量最多可高达110个[1]。同时CAN网络在信息传输结构中主要采用的是短帧结构,在进行信息传输时耗时较短,受外界因素的影响较小,因此在对传输信息进行检错的过程中,可以有效保证检错效果,同时针对每帧所包含的信息,都由CRC对其的准确性进行检验,从而提高了信息数据的准确性;第四,CAN进行通讯的过程中,一般采用的是双绞线或者光纤作为通讯载体,所以在后期选择使用时有较强的灵活性。
二、电动汽车CAN网络结构分析
在对纯电动汽车的整车网络进行设计过程中,可以将电动汽车的功能需求和网络信息数据进行有效融合,并在此基础上进行设计工作。整车网络设计过程中一般包括以下三个网段,即CAN一段、CAN二段、CAN三段。其中CAN一段对发动机节点部分功能的完成有着特殊的要求,并且完成过程是否规范会直接对CAN一段的正常运行产生影响,因此一般都是由整车控制器来完成上述功能,同时它也是连接CAN一段和CAN二段网关的关键途径,从而确保发动机节点信息的传送。CAN总线利用双绞线网络来对各个控制器的节点进行连接,使得汽车车身网络内部的各组成部分整齐有序的连接在一起。通常CAN网络的通信速率基本控制在500KBit/s左右,电动汽车整车控制单元(EVCU)在开始运行时,都会严格控制好数据帧的发送频率,相邻两次间隔发送时间控制在50ms左右[2]。微控制单元(MCU)主要负责接受主控制器发出的控制命令并对该命令进行执行,同时电机的运行状态也属于微控制单元管理的范围内,因此微控制单元要严格对电机的运行状态进行监测,有效减少因电机故障导致整体系统不能正常运行等情况的发生频率。电池管理系统(BMS)主要通过对电池的相关电气数据以及热参数数据进行收集与测量,从而准确计算出电池电量,为后续电池管理工作提供依据。将整车控制单元进行启动,使整车各结构各部分处于运行状态,在这种情况下利用CAN网络为载体,可以在点火控制模块(ICM)中清晰看到微控制单元下的电机转速、电机的运行状态以及电池管理系统中电池整体电压情况、单独结构电压情况等,同时电动汽车整车控制单元、电池管理系统、微控制单元等各部分出现的故障也可以直接从故障诊断仪表来进行判断。电动汽车整体网络结构分析图如图1所示。
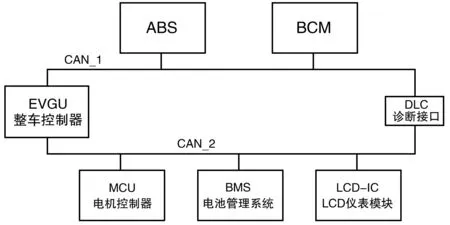
图1 纯电动汽车CAN网络结构
三、基于CAN总线的纯电动汽车故障诊断策略分析
(一)利用诊断工具来对电动汽车故障进行诊断。
1.基于CAN总线故障诊断系统的设计。本文主要通过对长安某款普通汽车改造后的纯电动汽车进行了深入研究与分析,并以此为研究对象,进行了基于CAN总线的纯电动汽车故障诊断系统的设计,实现对电动汽车各结构的诊断功能,旨在提高现有的故障诊断水平,确保电动汽车的安全运行,从而推动电动汽车行业获得更长久的发展。此次设计的故障诊断系统流程为:故障诊断仪表向电动汽车各结构发出诊断请求信息,各结构通过CAN网络接受到诊断仪表信息并进行响应,从而将各结构运行信息反馈给故障信息仪表,这样电动汽车诊断故障信息就可以通过诊断仪表直接显示出来。在对整车车身网络进行诊断时,故障诊断仪表发出的诊断信息请求主要是利用网关来进行的,网关在接收到诊断系统的请求信息后会对其进行识别[3]。在识别完成的基础上,会由网关直接与CAN网络中的发动机控制模块(ECU)进行对接,并传达一定的请求信息,这样CAN网络中的控制器在接收到请求信息后会直接对其作出回应,从而完成诊断系统与CAN网络的连接。
2.故障诊断仪表的设计。
(1)电源模块设计。一般来讲,故障诊断系统的输入电压为12V,在此背景下,就需要利用相关电源芯片对输入电压进行调整,将其设定为10V,从而满足电动汽车内部电池的电压需要,确保内部电池能够正常进行充电流程,在电动汽车内部电池完成充电过程后,就要对单片机和其他重要芯片工作所需电压进行详细的了解,而现有的10V电压就要利用专业电源转换芯片将其转换为5V和3.3V电压,以此来为其他集成芯片的正常工作奠定良好基础。
(2)单片机模块设计。在对单片机模块进行设计与挑选相关配置的时候,要清晰了解自身的工作需要,选择出高效率、性价比高的单片机。例如TI公司中的MSP430系列单片机,其内部的混合信号控制器可以在超低功耗的环境下产生较高的代码效率,因此在进行单片机模块设计过程中,可以从中进行挑选。此系列单片机精简指令集结构均是由16位组成的,CPU内部的寄存器等均可以使MSP430单片机内部的微控制器发生改变,使得其代码效率在自身范围内达到最高值。同时此系列单片机的时钟源具有较高的灵活性,因此可以使得各器件对功率的消耗降到最低。但是在特定工作环境下,对器件的功率消耗也有着固定的要求,所以低功率消耗的模式在此背景下并不适用。而数字化的振荡器(DCO)则可以对上述问题进行很好的解决,它可以在极短的时间内对器件的功率消耗进行改变,从而实现由低功耗模式迅速完成正常工作所需要标准功耗的转变。
(3)通信模块设计。MT公司生产的MCP2510系列控制器与传统的CAN控制器有一定的区别,它在传统CAN控制器的基础上设置了串行外设接口,从而方便后续CAN接口应用设计工作。MCP2510系列控制器不仅符合CAN的技术规范,发送的数据帧以及接收的数据帧均达到标准化要求,而且具有对接受到的数据信息进行有效过滤,并将留下的重要信息进行科学化管理的功能。
(4)存储模块设计。存储模块主要是对出现故障部分的信息数据进行存储的功能。因此在进行此模块设计的过程中,可以选择一些体积较小、能够节约I/O线以及存储性能好不容易丢失等特点的芯片。
(5)液晶显示设计。在进行液晶显示设计的过程中,可以选择一些中文控制芯片,例如台湾矽创电子公司的ST7920等就是此类芯片的最具代表性的一种,其内部控制整个显示系统的模块内部汉字图形点阵均为128×64位,从而更好地展现图形与文字信息。
3.故障诊断测试。想要完成对上述故障诊断系统以及诊断仪表设计的测试,可以通过CANoe软件与其他硬件进行结合,建立起针对发动机控制模块(ECU)进行检测和针对诊断仪表进行检测的相关应用平台,并在此平台中对上述诊断系统的设计进行测试。经过平台的建立以及相关测试等相关实践,将CANoe和诊断仪表的诊断结果进行对比,发现测试结果与诊断仪表显示结果具有较高的一致性,因此表明本文上述提出的诊断系统建立是可行的,并完成了对电动汽车故障诊断工作,所以此系统可以应用到实际生活当中。
(二)利用解码器进行故障诊断。由于CAN总线是电动汽车各网络节点的重要连接,因此CAN故障也是电动汽车中常见故障之一。针对此种故障的出现,可以采用解码器对CAN控制系统进行检测,从而判断故障出现原因。故障现象:有1辆2016款的长安电动汽车,当汽车开启空调制冷功能时,发现空调吹出的只有自然风,没有制冷效果。这也就证明,此汽车的鼓风机是处于正常运转状态的,只是空调的制冷系统出现了问题。故障检测与故障排除:通过利用解码器对该电动汽车的发动机控制系统故障码以及空调系统的故障码进行提取并分析,结果发现并没有故障码的出现。所以,故障来源可能是空调管路或压缩机出现了问题。经过详细排查结果发现,汽车空调压缩机的电磁离合器没有接触,所以可以推断出以下两种故障可能:一是故障来源于离合器的控制线路或电磁线圈出现了问题,二是空调的控制单元出现问题。但是经过电阻测量,发现电阻值是正常的。这种情况下,就要考虑空调控制单元故障,经测量,其数据流发动机转速为0,而汽车的发动机却是运行状态,因此可以得出,发动机控制单元与空调控制单元之间的连接线发生了故障,经过维修使得故障得到排除。
四、结语
综上所述,本文主要介绍了CNA总线的相关知识与特点,并提出了利用故障诊断系统以及CAN总线故障诊断方法等两种方法,并通过大量实践与检验,证明了上述两种诊断方法的可行性,因此可以在后续电动汽车故障诊断中进行应用。