基于虚拟现实的下肢主动康复训练系统
2019-02-20李文肖郭冰菁韩建海李向攀毛永飞
李文肖 郭冰菁 韩建海 李向攀 毛永飞
关键词: 虚拟现实; 主动康复; 下肢康复训练; 传感系统; 活动度; 足底力
中图分类号: TN915.5?34; TP274 文献标识码: A 文章编号: 1004?373X(2019)04?0061?04
Lower limb active rehabilitation training system based on virtual reality
LI Wenxiao1, GUO Bingjing1,2, HAN Jianhan1,2,3, LI Xiangpan1,2, MAO Yongfei1
(1. School of Mechatronics Engineering, Henan University of Science & Technology, Luoyang 471003, China;
2. Key Laboratory of Robotics and Intelligent Systems of Henan Province, Luoyang 471003, China;
3. Collaborative Innovation Center for Machinery Equipment Advanced Manufacturing of Henan Province, Luoyang 471003, China)
Abstract: In allusion to problems of the low participation degree and gradually?losing active motion intention of patients in the traditional lower limb rehabilitation training, a lower limb active rehabilitation training system based on virtual reality is designed. In the system, the inertial measurement unit (IMU) is adopted to acquire and calculate the activity degrees of lower limb joints, which are taken as the motion control signals in the virtual scene. The wireless Bluetooth communication mechanism is established to realize the combination of the lower limb motions of patients with their motion function rehabilitation training actions. The plantar force parameters of affected limbs are obtained by using the multi?point plantar force sensing resistor (FSR) embedded in a shoe, so as to recognize the gait phase periods, which are taken as the data basis of the rehabilitation assessment. The veracity of the acquired rehabilitation data, the real?time performance of interactive communication, and the fluency of the rehabilitation scene operation were verified in the experiment.
Keywords: virtual reality; active rehabilitation; lower limb rehabilitation training; sensing system; activity degree; plantar force
随着社会老龄化的加剧,由脑卒中等导致的神经损伤引起的下肢功能障碍者逐年增加[1],严重影响患者的生活质量,给社会和家庭带来了沉重的负担。传统的康复治疗多采用医师手工辅助完成,效率低、康复过程枯燥,已不能满足患者的需求[2]。
根据大脑神经可塑性理论、镜像神经元理论和运动康复理论,丰富的训练环境可以促进康复的进程[3],也可以有效地提高患者的训练兴趣和积极性,从而提高康复效率。如德国柏林弗朗霍费尔研究所研制Haptic Walker机器人系统和加拿大蒙特利尔McGill 大学研究的多自由度反馈的下肢训练器;当前的下肢康复训练设备多为在医疗机构中使用,价格昂贵[4],同时也需要医护人员的协助,缺乏可供患者使用的家庭便携式智能康复训练设备,不利于患者的自主训练。
针对康复治疗的家庭化与个性化需求,本文设计一种基于虚拟现实技术的便携式下肢主动康复训练设备,此训练系统有效地提高了患者在康复训练中的沉浸感,增加了患者的兴趣和主动性。同时在穿戴设备中内置多种传感器,对康复数据实时检测、无线传输,基于运动康复数据信息完成康复评估,实时了解康复训练效果。
1 总体设计方案
此康复系统基于关节矫形器构建,包括:嵌入式传感系统、蓝牙无线通信接口及虚拟康复训练场景设计。传感系统由微控制器(Micro Controller Unit,MCU)、惯性测量单元(Inertial Measurement Unit,IMU)和多点足底压力传感器(Force Sensing Resistor,FSR)组成,集成嵌入在矫形器中,如图1所示。
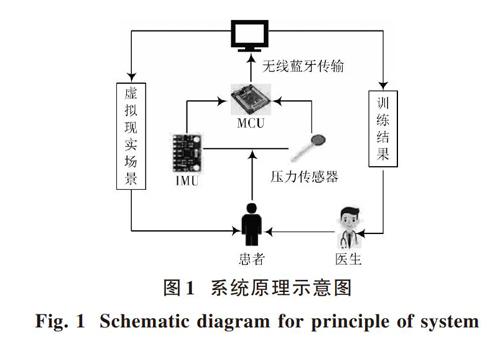
系统采用PC机作为上位机,基于Unity 3D软件平台开发人机互动游戏[5]。为了满足便携要求,数据通过无线蓝牙模块从下肢康复设备传输到PC机,电源模块采用迷你移动电源对系统供电。患者通过穿戴该系统,利用下肢运动来控制游戏人物的移动、旋转。内置的康复评估系统让使用者在锻炼时能实时了解自身步态参数的变化,及时保持或调整步态,以达到最优的训练效果。
2 虚拟康复场景的设计与分析
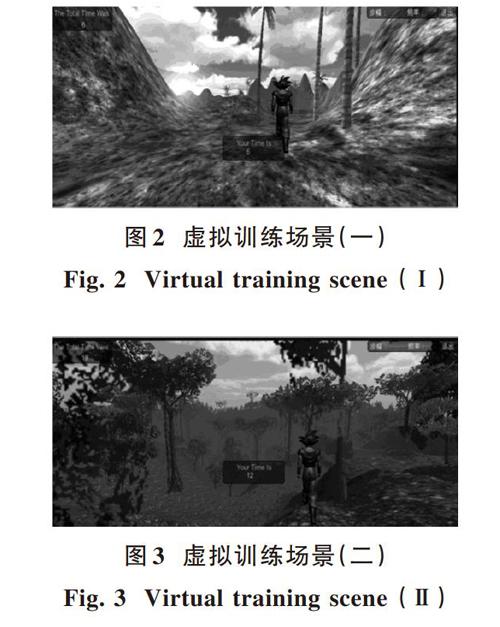
为了满足不同康复患者的需求,开发了难度不同的虚拟训练场景,包括地形设计、周围环境氛围设计、角色控制器以及脚本驱动等。场景一的行走难度等级低,患者在路面平坦的大自然环境下进行漫游,此场景具有听觉反馈,如图2所示。场景二的行走难度等级高,营造逼真的森林气氛,在患者前进的道路上会出现山丘、水沟、树木以及遮挡视线的水草,患者需要避开出现的各种障碍物,场景中伴有鸟叫声、流水声、提示音等听觉反馈,如图3所示。内置评价系统根据游戏完成时间及各点足底压力值来评价康复情况。还具有步态参数的显示,使训练者实时了解自身的步态情况,及时调节纠正,做出准确的康复动作。虚拟现实康复场景通过姿态检测单元IMU采集患者的下肢姿态作为反馈参数,控制游戏。
3 穿戴式传感系统的构建
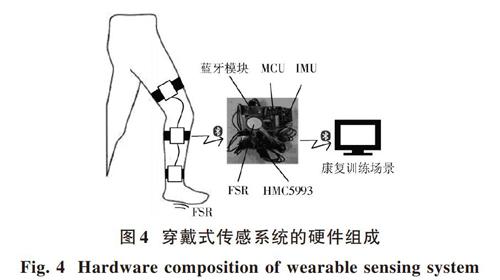
穿戴式传感系统由MCU,IMU和FSR构建,如图4所示。3个IMU模块分别安装在患者侧方下肢的大腿、小腿和踝关节,用于采集下肢运动姿态信息[6];4个足底压力传感器嵌入在鞋垫内,采集患肢足底与地面的接触压力。通过无线蓝牙把以上运动数据发送到虚拟游戏场景中,控制人物运动。
3.1 关节角度的采集
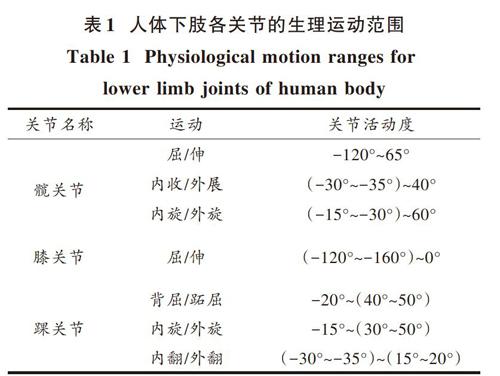
人在正常行走时,髋关节、膝关节和踝关节的生理活动范围如表1所示[7]。这是下肢关节角度传感器选型及其虚拟场景规划的数据基础。IMU单元选取姿态传感器MPU6050和磁力计HMC5883,数据融合后采集下肢的关节角度。MPU6050传感器内部集成了3个单轴的加速度计和3个单轴的陀螺仪,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态[8]。定义传感器测得的翻滚角(ROLL)为绕矢状轴旋转;俯仰角(PITCH)为绕额状轴旋转;偏航角(YAW)为绕垂直轴旋转。加速度计检测的是重力方向的加速度信号,陀螺仪修正ROLL和PITCH姿态角度。采用磁力计HMC5883,利用不同方向地球磁力的变化修正偏航角。
3.2 IMU测量误差分析
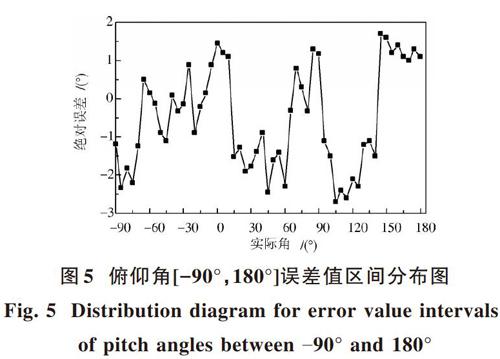
因为IMU本身存在的固有误差和安装误差,需要对其进行标定及误差补偿。实验时,按照5°的步长变化,对比传感器实测角度与标准角度。以髋关节为例,髋关节屈伸范围为-120°~65°,对应髋关节处穿戴的IMU单元的俯仰角。两者由于坐标系方向定义相反,IMU传感器的俯仰角应测范围为-65°~120°,扩大传感器俯仰角标定范围为-90°~180°。按照上述实验过程,俯仰角的测量值与实际值的误差值区间分布见图5。可以看出,俯仰角在工作范围在[-90°,180°]内误差范围为(-3°,2°),达不到康复训练中关节活动度的检测精度。
3.3 误差补偿
为了减小IMU单元的测量误差,采用多项式拟合方法对系统进行标定与误差补偿。根据最小二乘法拟合原理,以测量值为自变量,以实际值为因变量进行线性拟合。最小二乘法拟合的线性拟合模型为:
[?(x)=a0+a1x] (1)
根据原始数据可形成相应的拟合矩阵:
[Ga=y] (2)
式中:
[a=(a0,a1)T]; [y=i=0myi,i=0mxiyiT]; [G=m+1i=0mxii=0mxii=0mx2i。]
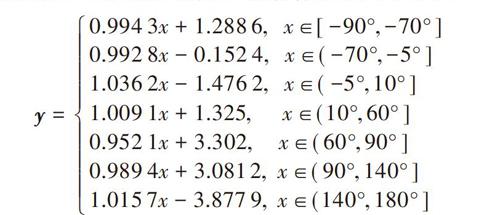
不同區间,系统误差大小不同,分布区间也不相同,因此按照误差范围进行分段拟合,分为7个区间:
[y=0.994 3x+1.288 6, x∈[-90°,-70°]0.992 8x-0.152 4, x∈(-70°,-5°]1.036 2x-1.476 2, x∈(-5°,10°]1.009 1x+1.325, x∈(10°,60°]0.952 1x+3.302, x∈(60°,90°]0.989 4x+3.081 2, x∈(90°,140°]1.015 7x-3.877 9, x∈(140°,180°]]
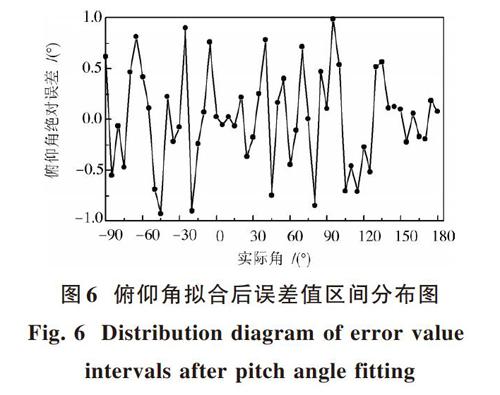
式中:x为拟合处理前角度;y为拟合处理后角度值,可以直接用于姿态计算。俯仰角拟合后的角度误差图见图6。俯仰角拟合后的角度误差控制在-1°~1°之内。
4 足底压力数据的采集
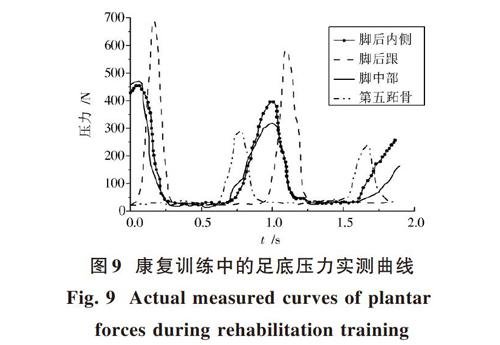
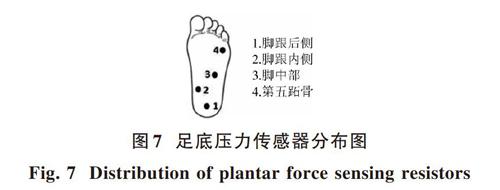
足底压力的大小和分布能够有效地反映人体步态的变化[9],从而可获取人体的某些生理或病理信息。选用Interlink Electronics公司的薄膜式压力传感器,采用超薄柔性材料制作,适合平面采集。根据偏瘫患者足底压力的分布特点,4个传感器分布在脚底的脚跟后侧、脚跟内侧、脚中部、第五跖骨[10],如图7所示。
5 數据无线传输设计
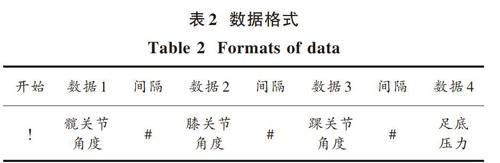
穿戴式传感系统的检测数据较多,如果为有线传输方式,患者穿戴后的运动不便,因此采用无线蓝牙技术进行数据的传输。选用SPP?CA蓝牙模块,且具有串行接口,方便实现与单片机的串行通信连接。上下位机通信使用串口发送Serial.println( )脚本,脚本中定义了波特率与通信协议。下位机需要发送关节角度、足底压力数据,制定的通信协议中,数据格式如表2所示。
数据发送的开头使用“!”字符,数据间用“#”分开。上位机使用C#编写的串口通信函数实现接收,在检测到开头标志位“!”后,将数据使用“#”符号分割成4个字节,使用Read(buf,0,1)进行4次逐字节的读取,之后再将数据转换为实测值,以数组形式对压力及角度变量保存。
6 实验验证
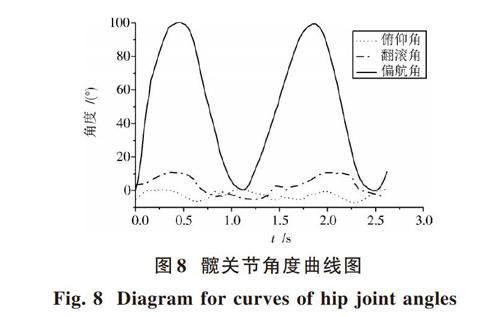
所研发的实验样机还未做临床研究,因此以健康人为实验对象,通过实测实验验证整个系统设计的可行性。以康复游戏运行时患者髋关节俯仰角的运动检测为例,髋关节屈伸角度设定范围为0°~100°。从图8可知,IMU获得的实测运动角度与设定的活动范围相对应,误差值为-1°~1°,验证了误差补偿方法的有效性,并确定了运动的步态周期约为1.2 s。虚拟康复场景中也能够准确地提示患者的运动,游戏运动过程连续流畅和虚拟场景匹配性高。实验过程中,实验者的注意力集中于虚拟场景及任务模式上面,有效地增加了康复兴趣和训练的主动性,验证了康复训练虚拟场景设计的有效性。
在测试髋关节活动范围同时,检测该受试者的足底压力。由图9可以看出支撑相时间约占58%,摆动相约占42%,4个足底压力传感器的测试值与人脚行走时的着力点分布对应,正确地体现出了正常人的步态[11],步态周期约为1.2 s,与图8中观察到的步态周期及康复游戏中的步态周期值一致。
通过对穿戴式传感系统的实测,验证了康复数据采集的精度及对人体康复过程中步态参数检测的有效性。为进一步临床康复治疗中对步态分析提供了支持,利用获取的步态曲线及足底压力曲线分析患者的步态周期、步态相的切换、关节活动度、行走中的足蹬力等,有效地对患者康复进行评估。
7 结 论
本文构建穿戴式传感系统和基于虚拟现实的主动康复系统。利用MCU,IMU和FSR传感器采集下肢障碍患者的姿态信息,并把其发送到PC机的虚拟场景中,与虚拟康复场景匹配。利用多项式拟合方法对传感器误差进行补偿,提高了检测精度。通过关节活动度和足底压力的实时检测,为步态分析提供了有效的康复数据依据,实现康复效果的评估。虚拟现实技术提供的实时一致反馈对患者产生了良好的激励作用,使患者的注意力更加集中,增加患者的主动性与积极性。
注:本文通讯作者为郭冰菁。
参考文献
[1] 刘小龙,赵彦峻,葛文庆,等.医疗助力下肢外骨骼设计及动力学仿真分析[J].工程设计学报,2016,23(4):327?332.
LIU Xiaolong, ZHAO Yanjun, GE Wenqing, et al. Design and dynamics simulation analysis of medical disabled lower limb exoskeleton [J]. Chinese journal of engineering design, 2016, 23(4): 327?332.
[2] 徐宝国,彭思,宋爱国.基于运动想象脑电的上肢康复机器人[J].机器人,2011,33(3):307?313.
XU Baoguo, PENG Si, SONG Aiguo. Upper?limb rehabilitation robot based on motor imagery EEG [J]. Robot, 2011, 33(3): 307?313.
[3] 郭晓辉,王晶,杨扬,等.基于虚拟现实的下肢主被动康复训练系统研究[J].西安交通大学学报,2016,50(2):124?131.
GUO Xiaohui, WANG Jing, YANG Yang, et al. Active and passive training system of lower limb rehabilitation based on virtual reality [J]. Journal of Xian Jiaotong University, 2016, 50(2): 124?131.
[4] 刘瑞素,邢新闯,刘亚男,等.脚踏式下肢康复训练机器人结构设计及运动学仿真[J].中国机械工程,2016,27(20):2722?2727.
LIU Ruisu, XING Xinchuang, LIU Yanan, et al. Design and simulation of a lower limbs rehabilitative robot [J]. China mechanical engineering, 2016, 27(20): 2722?2727.
[5] 欧阳攀,李强,卢秀慧.基于Unity3D的虚拟校园研究开发与实现[J].现代电子技术,2013,36(4):19?22.
OUYANG Pan, LI Qiang, LU Xiuhui. Research and implementation of virtual campus development based on Unity3D [J]. Modern electronics technique, 2013, 36(4): 19?22.
[6] HASSAN M, KADONE H, SUZUKI K, et al. Wearable gait measurement system with an instrumented cane for exoskeleton control [J]. Sensors, 2014, 14(1): 1705?1722.
[7] 张佳帆.基于柔性外骨骼人机智能系统基础理论及应用技术研究[D].杭州:浙江大学,2009.
ZHANG Jiafan. Exoskeleton based man?machine intelligent system and its application [D]. Hangzhou: Zhejiang University, 2009.
[8] 李世光,王文文,申梦茜,等.基于STM32的姿态测量系统设计[J].现代电子技术,2016,39(9):12?14.
LI Shiguang, WANG Wenwen, SHEN Mengxi, et al. Design of attitude measurement system based on STM32 [J]. Modern electronics technique, 2016, 39(9): 12?14.
[9] 邓翔,佃松宜,翁桃.基于FSR的可穿戴式足底压力检测系统[J].传感器与微系统,2013,32(2):81?83.
DENG Xiang, DIAN Songyi, WENG Tao. Wearable plantar pressure detecting system based on FSR [J]. Transducer and microsystem technologies, 2013, 32(2): 81?83.
[10] 曹恒,贺成坤,孟宪伟,等.下肢外骨骼服传感靴的结构优化分析[J].工程设计学报,2010,17(1):35?39.
CAO Heng, HE Chengkun, MENG Xianwei, et al. Structure optimization analysis for exoskeleton foot [J]. Journal of engineering design, 2010, 17(1): 35?39.
[11] 张今瑜,王岚,张立勋.基于多传感器的实时步态检测研究[J].哈尔滨工程大学学报,2007,28(2):218?221.
ZHANG Jinyu, WANG Lan, ZHANG Lixun. Research on real?time gait phase measuring based on multi?sensor [J]. Journal of Harbin Engineering University, 2007, 28(2): 218?221.
