变电站巡检机器人关键技术及其适用性分析
2019-02-11薛博水陈德凯
薛博水 陈德凯
云南电网有限责任公司昆明供电局 云南 昆明 650000
1 变电站巡检机器人研究现状
传统的巡检方式是通过巡检人员手持红外探测仪的检验方式进行巡检,不仅耗费大量的人员精力,同时巡检过程更是具有一定的危险性。日常巡检工作繁重,巡检工作量巨大,对于巡检人员的综合素质要求较高,此外,在城镇区域的变电站大多建于市中心,但对于偏远地区的变电站大多建于环境恶劣且地势险峻的地区,同时这样的变电站更是肩负着传输、分散等众多任务,是电力网架的核心,同时人工巡检容易出现漏检或是误检等事故。
2 变电站巡检机器人关键技术
2.1 机器人移动机构 移动机构的选择关系到运动控制系统的控制策略,是巡检机器人在变电站路况环境下高速、高精度稳定运行的重要基础。按照机器人越障方式不同,其移动机构主要包括以下几类:轮式、履带式、固定轨道式等。
2.2 机器人导航控制技术 导航控制技术直接决定了变电站巡航机器人的运行精度,现阶段主要使用的导航技术主要包含以下几方面:视觉导航、惯性导航、磁轨道导航、激光反射导航及SLAM导航。不同的导航控制系统具有不同的优势与劣势,在具体应用时还应结合变电站实际情况进行分析应用,对于精度、生产成本以及操作性能等应采取综合分析评价方式确定具体方式。
2.3 机器人自主充电技术 变电站巡检机器人大都采用磷酸铁锂电池供电,为满足巡检机器人长时间、不间断工作的供电需求,需要为巡检机器人设置一套高效、可靠的自主充电解决方案。目前自主充电技术主要有接触式自主充电、光能自主充电及非接触式自主充电等。
2.4 机器人无线通信网络 为确保巡检机器人与后台信息处理系统信息的实时交互,必须确保通信网络的高效稳定,但由于较多变电站建在偏远地区,难以确保通信网络信号良好传输,现阶段采用的通信网络技术主要有WIFI与UWB等。
3 站内运维巡检业务应用需求
站内一二次设备运维检修业务包括巡检、倒闸操作等,其中巡检作业包括设备日常巡检、设备例行试验及设备诊断性试验三类。对于倒闸操作可通过自动化技术改造采用电动操作机构解决。对于事故处理、设备例行试验及设备诊断性试验,由于其涉及因素众多且操作复杂,需要大量凭借专业人员相关经验,现阶段智能化作业手段尚不能满足操作需求。对于设备日常巡检,根据《输变电设备状态检修试验规程》要求,需通过看、听等方式检查各设备外观、开关位置、表计读数、节点温度等,其巡视周期短,其巡检项目及要求如下表。
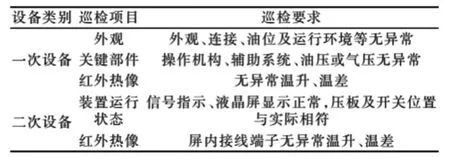
从上表可知,站内日常巡检整体技术要求不高,但由于设备分布较广,且数量众多,适宜采用智能机器人技术代替人工完成此部分巡检作业。
4 相关技术适用性评估
4.1 机器人移动机构适用性评估 对于仿生腿式结构由于其制造工艺及技术尚不成熟,近期内尚不能广泛推广使用,履带式结构巡检机器人由于其结构特点,不能进行连续越障操作,因此主要适用于地势平坦区域。固定轨道式结构巡检范围广泛但有局限性,同时能获取变电站设备三维信息等,但其巡检是依靠变电站内的墙体或棚顶等设施,因此适用于换流站或屏柜等设备的巡检。轮式结构是目前引动技术中较成熟的,且操作灵活成本低等优势,可以应用与室外设备的巡检工作。
4.2 机器人导航控制技术适用性评估 对于变电站巡检机器人,由于其需要定点巡检各设备开关表计读数,导航定位精度要求较高,因此较为可行的导航技术有激光反射导航、磁导航及SLAM导航等。激光反射导航虽然测距精度较高,但是存在检测盲区;磁导航虽然实现成本较低,定位较为精准,但运行方式不灵活;而基于LidarSLAM的导航控制技术由于其定位精度极高、技术成熟可靠,目前高精度激光雷达已能达到厘米级定位精度,能够适应变电站巡检应用需求。
4.3 机器人自主充电技术适用性评估 巡检机器人在实际使用中不仅要考虑充电设备的体积还要考虑充电功率等问题,因此目前广泛使用的充电技术是接触性充电技术。
4.4 机器人无线通信网络技术适用性评估 由于高清图像数据传输对无线网络的带宽要求较高,当前 Wi-Fi、UWB、Li-Fi均能提供10Mbps以上的传输带宽。但由于UWB传输距离较近,若要实现变电站全区域覆盖需要布置较多的中继节点,而Li-Fi技术则由于技术发展尚不成熟,其传输距离和实现方案仍有待完善。Wi-Fi技术由于其发展较为成熟,终端支持丰富,传输速率较高、信号覆盖面广,而且对于变电站内而言设备的电源供应充裕,能很好地弥补Wi-Fi技术高功耗的缺点,较为适合作为站内巡检机器人的无线通信传输的需求。
5 结语
利用智能机器人能够有效代替人工完成站内一二次设备的日常巡检,且其巡检效率高。但当前巡检机器人智能化程度仍显不足,模式识别算法及综合诊断分析能力仍有待提高。
