一种含间隙铰链并联机构的动力学分析
2019-02-07李桂玉
李桂玉


摘 要:研究基于ADAMS仿真系统,以某型号并联机构为主要研究对象,对含间隙铰链并联机构进行了动力学分析。文章在考虑库伦摩擦力的前提下搭建了相关模型;在含间隙铰链并联机构的动力学分析模型基础上,利用于ADAMS仿真系统对该模型进行了仿真;分析了理想接触状态下该机构的最佳动力学性能。研究结果显示,平台和机构的加速度以及接触力与铰链间隙数据呈强相关性。
关键词:间隙;铰链;并联结构;模型搭建;动力学分析
六自由度并联机构与其他传统的机构相比,在结构刚度、生产工艺精度、加工响应速度等方面具有明显的优势[1]。因而,以Stewart平台为代表的六自由度并联机构已经逐渐替代了其他传统的机构,成为市场上应用最为广泛的机构和控制系统。对于某些并联结构应用场景而言并不需要过多的自由度,通常2~5自由度便能满足生产工艺需求。因此,针对少自由度并联机构的研究和应用逐渐增多。
本文通过对国内外学者关于机构间隙问题研究的分析,认为当前学术界关于典型结构间隙问题的研究主要集中在问题描述、平面曲柄摇杆作用以及间隙大小对结构的影响程度等问题上,借助含间隙铰链对并联机构进行影响分析,发现和动力学性能模型构建方向仍没有相关研究。因此,本文借助ADAMS软件,对3-RRRT并联机构中铰链在含间隙情况下的动力学性能进行了模型构建和详细分析。
1 并联机构概述
3-RRRT机构属于少自由度并联机构中最为常见的一种,相比于其他少自由度机构具有控制简单、无需过多的驱动元件、结构设计紧凑、空间占比小等优势,因而,具有更高的实用价值。随着3-RRRT机构应用范围的拓展,国内外关于相关结构设计、动力学分析的研究逐渐增多[2]。
由于3-RRRT少自由度并联机构在生产制造、安装以及日常使用等过程中会发生磨损,因而在磨损后的运动副之间容易形成间隙。随着间隙的不断增大,各运动副及相关部件之间会逐渐增加发生猛烈碰撞和冲击的概率。碰撞产生的动应力会逐渐使零部件之间的弹性形变增大,进而增加了运动副、结构元素之间的摩擦、噪声和震动。并联机构的摩擦生产间隙是该类型结构生产效率逐渐降低的最根本原因。
2 动力学模型构建
2.1 非线性弹簧阻尼接触力模型
含间隙的铰链中套筒的半径为r1,位置向量用r01表示,销轴的半径为r2,位置向量用r02表示;套筒和销轴半径的差值(r1-r2)所表示的含义为结构间隙的大小,用c表示;套筒和销轴位置向量的差值(r02-r01)所表示的含义为结构间隙的偏心向量。
在对间隙结构进行系统动力学特征分析时,先要针对套筒及销轴之间的接触力进行计算[3]。本文为得到精确的接触力数值,运用赫兹接触模型理念搭建一个能够同时反映套筒与销轴的碰撞速度、材料特性和发生碰撞时两者表面特征的分析模型,其计算方法为:
其中,Fk表示套筒与销轴之间的接触弹性力;Fd则表示因套筒与销轴之间的碰撞导致系统出现的能量损耗;K为套筒及销轴协同的刚度银子;D表示系統中的阻尼系数;n为力指数常数,鉴于通常套筒和销轴所使用的加工材料均为金属材料,取值为1.5。
通过计算,在考虑阻尼的情况下,套筒及销轴之间的法向接触力为:
2.2 修正的库仑摩擦力模型
动摩擦力和静摩擦力统称为库仑摩擦力,由库仑摩擦力延伸出的三大定律对所描述的摩擦力划分为静摩擦力、滑动摩擦力和滚动摩擦力,摩擦力的大小是描述物体与摩擦系数的乘积,方向为相对运动或趋势的反方向。库仑摩擦力通常无法针对两物体之间由静摩擦力到动摩擦力过程中的情况,仅能针对一般摩擦力的大小、方向等问题进行描述。对物体间由静摩擦力到动摩擦力转变阶段摩擦力的大小仅能通过引入阶跃函数来实现,其描述和计算方法有一定的缺陷。为此,本文引入ADAMS系统来对库仑摩擦力进行优化和修正。
修正以后的库伦摩擦力模型针对静摩擦、动摩擦和粘滞摩擦等进行了优化和修正,弥补了单一库仑摩擦力计算方式的不足。修正以后的库仑摩擦力模型主要计算参数有:
其中,V表示套筒和销轴之间在接触点时的相对滑动速度;μs,μd分别表示套筒和销轴处于静摩擦状态和滑动摩擦状态时的摩擦系数;Vs表示并联机构达到最大静摩擦系数时,套筒和销轴之间的相对滑动速度。
3 含铰链间隙3-RRRT并联机构的动力学分析
3.1 3-RRRT并联机构
利用ADAMS搭建含铰链间隙3-RRRT并联机构模型,得到如图1所示结构。该结构由支链×3、动平台×1、销轴×1、套筒×1、定平台×1、支座×1等主要零部件构成。其中,支链由移动副×1、铰链×3和杆件×2构成,机构运作时,3条支链两两相交且铰链轴线平行于移动平台的副轴线。
研究主要分析3条支链两两相交处铰链间隙对整个并联机构的影响。因此,研究将两支链连接部位用套筒和销轴连接,构成并联机构。同时,将两支链分别与销轴和套筒进行固定,确保运动或间隙只发生于套筒和销轴连接处。此结构中的移动副均为驱动副,运动速度为60 m/min。
3.2 机构的动力学分析
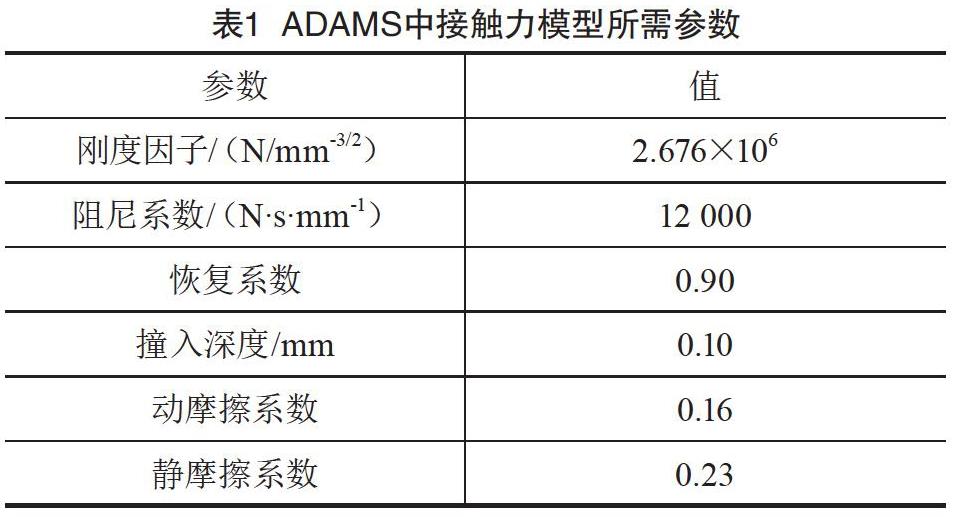
研究假设利用ADAMS软件进行仿真的时间为0.2 s,共计运行步数为300步。通过计算并联结构含间隙铰链中的相关参数,得到ADAMS搭建含铰链间隙3-RRRT并联机构模型中所需的所有参数,具体数值如表1所示。
由模拟结果可知,当系统处于初始状态时,并联结构的套筒和销轴之间的形心距离等于0,随着运动的展开,套筒和销轴之间的间隙出现波动,随之两者之间的形心呈现圆周运动并发生碰撞。当套筒与销轴之间的间隙数值等于0.2 mm,0.4 mm时,移动平台形心加速度具有高度相似的变化规律,但是此时套筒与销轴之间的接触力F值不同。随着运动时间的增长,套筒与销轴之间的间隙逐渐增大且两者之间的接触频率、振幅也越来越大。不论套筒和销轴之间的间隙具体数值为多大,两者之间的相对运动最终都是由剧烈趋向于平稳,且平台的速度不会受到套筒及销轴之间间隙大小的影响。假设并联结构中的3条支链上都存在铰链间隙,且间隙值为0.2 mm,此时动平台的加速度受间隙影响程度变化状态为:由剧烈冲击逐渐恢复为0,但是套筒与销轴之间的接触力不会恢复为0,而是经过反复接触和反复波动后,逐渐恢复平稳。
4 结语
综上所述,研究从单一支链间隙和3条支链同时存在间隙的条件下,对并联结构套筒和销轴之间的间隙动力学性能进行了分析,发现以下规律:
假如系统结构中仅存在一条支链的套筒和销轴之间有间隙,则此间隙数值越大则接触频率与振幅值均越大;随着系统间隙数值的提升,接触情况都是逐渐趋向平稳,并没有出现持续剧烈震动或震动持续增强的现象;套筒和销轴之间存在间隙不会对东平台的速度产生任何影响。
当系统3条支链的套筒和销轴之间均存在间隙的情况下,间隙的铰链数量的提升能够显著增强机构受到的接触力,此时随着冲击的增强,机构的运动受到的影响越明显。
在对并联机构进行设计时,要考虑多种支链并存情况下间隙对机构的影响,从更加全面的角度对机构的动力学性能进行分析。
[参考文献]
[1]陈江义,郝雪清,虞启辉.含间隙铰链并联机构的动力学分析[J].郑州大学学报(工学版),2012(1):98-101.
[2]陈江义,郝雪清,范利格,等.计入构件柔性和铰链间隙的并联机构动力学分析[J].机床与液压,2013(23):28-31.
[3]王晓磊.3-sPS+sP并联机构误差建模及灵敏度分析[J].组合机床与自动化加工技术,2014(12):105-108.
