基于主动横向稳定杆的汽车防侧倾控制策略及算法研究
2019-02-06解利臣
赵 强,解利臣
(东北林业大学 交通学院,哈尔滨 150040)
随着汽车行业的发展,安全性越来越受到人们的广泛关注。尤其是近几年来,由汽车侧翻引发的交通事故给人民的生命财产安全带来了巨大损失。利用主动横向稳定杆技术适当提升悬架的侧倾角刚度来抑制侧倾角过大已成为国内外研究的热点问题。
Dugard等[1]在重型车辆上进行了主动横向稳定杆系统的动力学建模,以进入电子伺流阀的电流作为控制信号,基于LQR方法在频域与时域的仿真试验下,实现了线性最优控制,证明了主动横向稳定杆显著提高了车辆系统的侧倾稳定性。Zulkarnain等[2]基于半车4自由度动力学模型,研究了在PID控制器作用下主动横向稳定杆的动态特性及其影响,通过仿真实验验证了设计模型的有效性。为提高汽车的操纵稳定性和平顺性,周兵等[3-4]根据主动悬架与横向稳定杆的耦合关系,设计了2个子系统的协调控制器,提升了车辆的操纵稳定性和平顺性。李俊伟等[5-6]采用变刚度横向稳定杆以改善空气悬架客车较差的侧倾稳定性,应用变刚度横向稳定杆的角刚度关系式进行仿真实验,证明了在没有大幅度增加车身侧倾的同时,变刚度横向稳定杆能明显降低车身侧倾角,提高车身侧倾稳定性。
本文以所建立的3自由度汽车侧倾模型为研究对象,以车身侧倾角作为反馈信号输入给经过遗传算法优化过后的模糊PI-PD控制器,由控制器解算出主动稳定杆的抗侧倾力矩,输入到汽车动力学模型中,利用遗传算法适应度函数搜索最优点的高效性,对控制器参数进行了全局优化,在Simulink仿真环境下进行对比分析,说明主动横向稳定杆相对于被动横向稳定杆明显提高了车辆的侧倾稳定性。
1 车辆系统动力学建模及理想侧倾角确定
1.1 3自由度车辆模型的建立
本文在建立的非线性3自由度汽车动力学模型的基础上进行研究,其中以车辆质心位置为坐标原点,x轴正方向为汽车前进方向,y轴正方向为行进方向的左侧,z轴正方向为通过质心垂直向上,如图1所示。

图1 车辆动力学模型
动力学方程如下:
汽车的侧向运动:

汽车的横摆运动:

汽车的侧倾运动:

式中:M为整车质量;(amf-bmr)项为车辆总质量M绕车辆质心的转矩;mf、mr分别为前后轴质量;mb为簧上质量;Ixx和Izz分别为整车绕X轴与Z轴的转动惯量;Ixz为整车绕XZ轴的惯性积;a、b分别为车辆质心距离前、后轴距离;hs为簧上质量高度与侧倾中心高度之差;Dφ为车身侧倾时悬架提供的角阻尼;Kφ为车身侧倾时悬架提供的角刚度;df、dr分别为单位车身侧倾角引起的前、后轮胎偏移量;v为车辆的侧向速度;r为车辆的横摆角速度;φ为车身侧倾角;为车身侧倾角速度。
式(1)~(3)表示的是未施加主动横向稳定杆控制力矩情况下的动力学模型。在汽车即将发生侧翻的情况下,主动横向稳定杆的作用便是提供主动抗侧倾力矩Manti,从而抑制汽车侧倾角过大而导致的侧翻。在有稳定杆提供的主动力矩情况下,汽车侧倾运动方程为:

为了用矩阵进行系统分析和数值积分,取状态变量

根据小侧偏角范围内不考虑轮胎非线性的假设,前后轮胎的侧向力分别为:



图2 控制系统示意图
1.2 车辆理想侧倾角的确定
在汽车行驶的过程中,除了稳定杆的侧倾角刚度、簧上质量等固定参数会影响车身的侧倾运动,侧向加速度ay也会影响车辆侧倾角的大小。为了降低车身的侧倾角以达到提高车辆的侧倾刚度来改善车身的侧倾稳定性,同时兼顾乘坐舒适性以及理想的侧倾反馈以便驾驶员实时对车身的姿态进行判断,Sorniotti等[7]通过大量的试验,总结出了车辆侧倾角与侧向加速度的数学关系:

由于分段函数在实际的模型计算中不能直接使用,所以采用拟合处理的方法对上述分段函数在Matlab中得到理想车辆侧倾角与侧向加速度的关系曲线。拟合函数的表达式为0.085 9ay,得到如图3所示的拟合曲线。
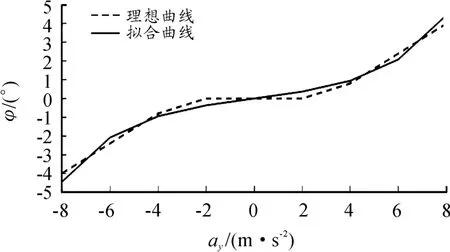
图3 侧倾角与侧向加速度关系曲线
2 模糊控制器的设计
2.1 模糊PI-PD控制器设计
为提高控制器对非线性系统的兼容性,Maghi等[8]采用了传统PI-PD控制器的线性结构,用非线性模糊函数代替系数增益。所采用的模糊PIPD控制器在经过遗传算法对侧倾角及其变化率、侧倾角误差及其变化率的增益系数迭代优化后,在输出理想侧倾力矩的同时,也改善了微分超调的问题。PI-PD型模糊控制器的输出可表示为:

式中:uPI(nT)与uPD(nT)分别为模糊PI、PD子控制器的输出信号。传统的PI、PD控制器输出表示为:


式中:uPI(nT)是经过线性变换后模糊PI控制器的输出;T为系统采样周期;KuPI是模糊PI控制器的增益量。同理,模糊PD控制器的输出为:

式中KuPD是模糊PD控制器的增益量。

在模糊PI-PD控制器中,KuPI和KuPD增益是由提前编辑好的隶属度函数及规则决定的。控制器的输入与车辆系统直接反馈的侧倾角信号有关,由于本次研究是以控制策略对于改善车身侧倾角为目标,便不对稳定杆系统进行单独分析,具体控制器的控制原理如图4所示。

图4 控制器控制原理
2.2 模糊规则及隶属度函数制定
模糊控制是一种基于规则的控制,不需要对控制对象建立精确的数学模型,只要根据专家的经验、知识进行总结就可以构成控制算法,对线性系统具有良好的控制效果,对非线性、噪声和纯滞后等具有良好的抑制能力。对于本文研究的模糊控制器,分别对其输入量ep、ev、d、Δy及输出量uPI(nT)、uPD(nT)编辑相应的隶属度函数规则。
采用三角形隶属度曲线模型及“质心法”进行规则的解模糊过程,观察模糊规则的FIS曲面,如图5、6所示。

图5 模糊PI输入输出关系曲面

图6 模糊PD输入输出关系曲面
3 基于遗传算法的模糊控制器增益参数的优化
遗传算法提供了一种求解复杂系统优化问题的通用框架,它不依赖于问题具体领域,对问题的种类有很强的鲁棒性。本文基于遗传算法的基本原理,根据遗传算法对于多目标寻优及搜索高效的优点,对所需优化的模糊控制器中Kp、Ki、Kd、Kp′、KuPI、KuPD六个比例增益环节进行适应度的匹配计算,以实现群体中各个个体在优化计算的过程中能达到或接近于找到最优解的优良程度。基本流程如图7所示。

图7 遗传算法基本流程
3.1 初始种群选取及适应度函数设计
在对种群参数进行初始化后,要针对个体的适应度值进行计算以度量群体中各个个体在优化计算中能达到或有助于找到最优解的优良程度。一般情况下,适应度值越大,表明解的质量越好。在选取模糊PI-PD控制器的增益参数时,应考虑增益值作为初始种群的大小以及多样性,以确保遗传算法有良好的收敛性。在Simulink已搭建好的控制器模型中,将侧倾角信号导入到Matlab的工作空间中以进行“染色体”的适应度计算。通过个体及全局最佳的适应度值计算确定最佳“染色体”。
3.2 迭代寻优
根据pi=fi/∑fi=fi/fsum,采用“赌轮盘”选择法[9]来决定哪些个体可以进入下一代,完成种群“基因”的选择过程。为了确保种群的多样性和优越性,在参数迭代寻优的过程中,交叉与变异过程相互配合,可有效提高算法的随机搜索能力以找到最优的控制器增益参数。重复此过程,直到群体的适应度值最小,即寻得最优解。
4 角阶跃工况下的仿真实验
4.1 角阶跃工况下的仿真实验
为验证通过控制器给予横向稳定杆主动抗侧倾力矩相对于被动横向稳定杆能有效改善车辆的侧倾稳定性,本文选取表1参数所示车型进行了角阶跃工况的仿真实验。

表1 汽车仿真模型参数
仿真工况的初始条件设定:在t=1 s时刻,给予方向盘90°转角的角阶跃工况输入信号,模拟车辆在遇到紧急情况下的避障情形,对比观察车辆侧倾角及侧倾角速度的变化情况。
由图8、9可以看出:施加主动控制的车辆模型在紧急转动方向盘的情况下,车身稳定后侧倾角相比未加控制的车身侧倾角降低了0.05 rad左右,且主动控制能使系统较快地达到稳定状态,即让车身恢复正常行驶状态的能力得到明显提升;同时,主动横向稳定杆控制的侧倾角速度曲线响应更为平顺,超调量减小50%左右,与被动横向稳定杆相比也较大程度地改善了汽车的侧倾稳定性。进而证明通过遗传算法优化过的控制器取得了理想的控制效果。

图8 侧倾角变化曲线

图9 侧倾角速度变化曲线
4.2 鱼钩工况试验仿真
在车辆参数等条件均与前述工况相同的情况下,采取了鱼钩工况输入[10]。由于鱼钩工况是汽车侧翻试验中较为恶劣的行驶工况之一,对于验证本文车辆的侧倾稳定性具有理论意义。
鱼钩工况的输入信号如图10所示。在车速为60 km/h的行驶状况下,方向盘按照图10所示的信号输入,所得到的侧倾角及侧倾角速度如图11、12所示。由图11可以看出:在给方向盘施加鱼钩转角信号后,带有主动横向稳定杆的车辆侧倾角相对于被动稳定杆车辆模型重新恢复稳定状态后,侧倾角降低了大约2°,实现了降低侧倾角的目标,提高了车辆的抗侧倾能力。图12表明:相对于被动横向稳定杆,主动横向稳定杆的侧倾角速度响应曲线超调量小于被动稳定杆,从而证明控制器的有效性。

图10 转向盘转角鱼钩输入
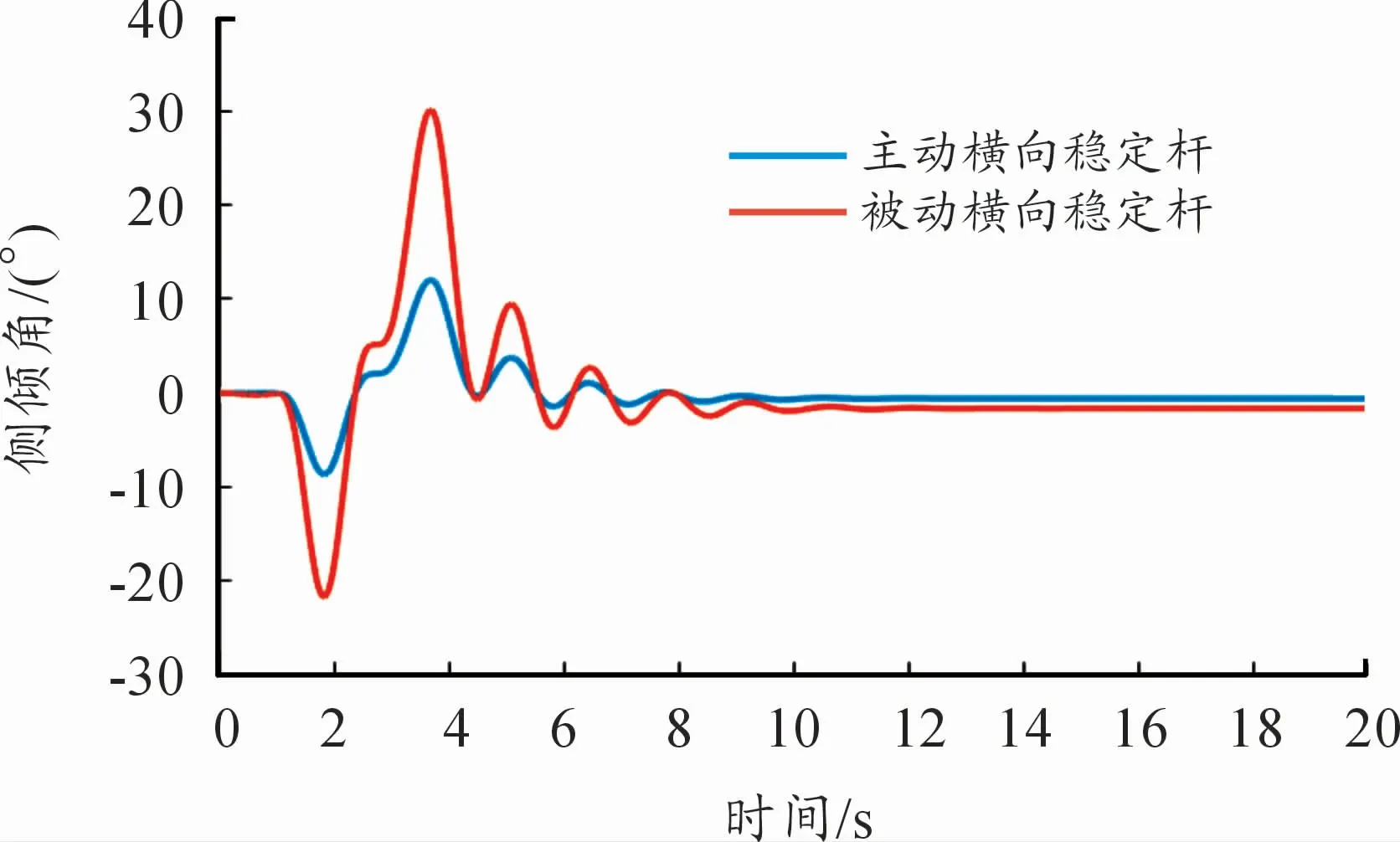
图11 侧倾角变化曲线

图12 侧倾角速度变化曲线
5 结束语
针对汽车转向时侧倾角变化的特点,建立了包括侧向、横摆和侧倾的3自由度动力学模型,通过建立状态方程,确定了方向盘转角与主动抗侧倾力矩作为系统的输入。
设计了模糊PI-PD控制器,根据编辑好的隶属度函数规则输出目标控制力矩,通过遗传算法对控制器增益的全局优化,在进行合理的迭代寻优次数后,提升了控制器的控制效果,具有超调量小、响应速度快的优点。通过仿真结果可知:装有主动横向稳定杆的车辆比被动稳定杆的车辆显著减小了车身侧倾角,提升了汽车的转向稳定性。
