便携式水下机器人设计
2019-01-28裴国栋卞则武温亚楠
裴国栋,卞则武,温亚楠
便携式水下机器人设计
裴国栋,卞则武,温亚楠
(青岛市光电工程技术研究院,山东青岛 266019)
出于对近海海洋探索的目的,本文应用了上次研究[1]的水下ROV空间姿态控制系统设计了一种便携式水下机器人。该水下机器人系统硬件部分主要由电源模块、无刷电调、遥控部分以及姿态传感器模块组成,软件控制以及相关数据处理由一块ARM-M3内核的处理器完成,编译软件使用Kile。水下机器人结构采用3D打印机制作,材料选用PLA。遥控通讯采用CAN总线协议。水下机器人经过实际调试可以达到相关技术要求,下潜深度100 M,能实现简单的水下作业要求。
水下机器人 姿态检测 水下探测
0 引言
机器人技术是集运动学与动力学理论、机械设计与制造技术、计算机硬件与软件技术、控制理论、电动伺服随动技术、传感器技术、人工智能理论等科学技术为一体的综合技术,它的研究与开发标志着一个国家科学技术的发展水平。
随着人口数量的增长和科学技术水平的不断提高,人类已把海洋作为生存和发展的新领域。海洋的开发与利用已经成为决定一个国家兴衰的基本因素之一。从而使水下机器人具有更加广阔的应用前景[8]。
水下机器人一般可以分为两大类:一类是有缆水下机器人,习惯称为遥控潜水器(Remote Operated Vehicle,简称ROV);另一类是无缆水下机器人。习惯称为自治潜水器。(Autonomous Underwater Vehicle,简称AUV)。此外按使用的目的分有水下调查机器人(观测、测量、试验材料的收集等)和水下作业机器人(水下焊接、拧管子、水下建筑、水下切割等作业)。按活动场所分,有海底机器人和水中机器人,如今随着国家海洋探索脚步的加快,水下机器人的研发以及应用也越来越重要。
1 系统硬件设计
1.1 水下控制系统
根据实际应用需求以及各方面综合考量系统选用意法半导体(ST)的增强型处理器STM32f103C8T6芯片作为主处理器芯片,负责采集传感器数据以及对水下机器人进行控制,携带的传感器有姿态传感器MPU6050(负责获取水下机器人实时姿态,用于通过推进器闭环控制)、湿度传感器DHT11(负责检测电子仓密封性)以及一个模拟摄像头,预留的数据接口有SPI、串口及IIC等,可根据后期需要挂载其他传感器[2]。此外还留有的通讯接口有CAN以及RS485遥控暂用的CAN通讯接口。通讯线缆使用水下六芯双绞屏蔽缆,分别用于传输控制信号、摄像头模拟信号以及电源。水下机器人系统框图图如图1所示。
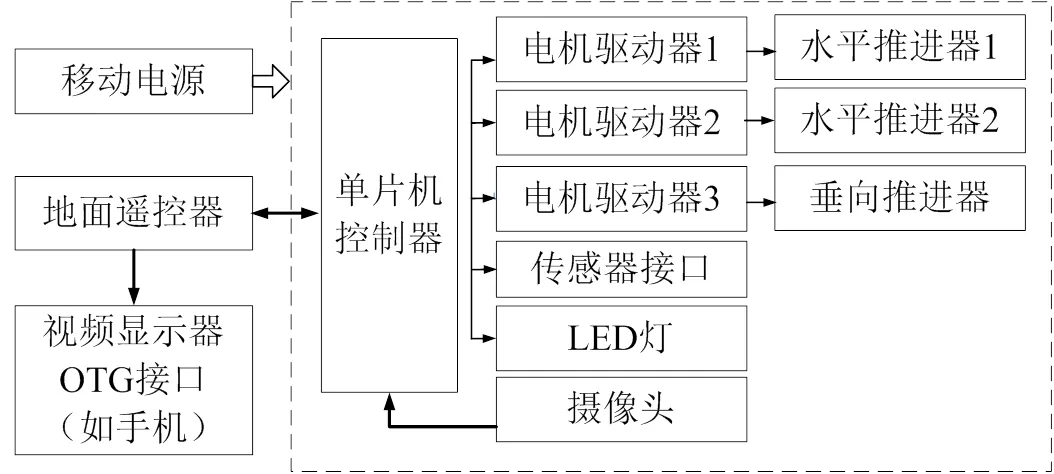
图1 系统框图
其他方面,推进器使用12 V供电,最大推力可达11 N,两侧推进器同时转动,可使水下机器人的航速达到1 m/s。摄像头选用的RunCam nano FPV迷你14*14 650TVL摄像头,图像清晰,视野广阔。
1.2 水上遥控监控系统
水上遥控监控系统分为遥控器以及监控平台,遥控器为四通道,其中三通道分别控制水下机器人的前-后、左-右以及升-潜,其余一个通道预留为控制水下视频云台。水下视频采用移动终端来实时显示,水下模拟视频通过MicroUSB接口的视频采集卡连接至手机或者PAD的MicroUSB接口,然后通过设备的OTG功能来实现数据传输以及显示。此外遥控系统还预留了蓝牙BLE接口,后期可通过蓝牙将水下传感器以及水下机器人实时状态传输至移动终端显示。
2 系统软件设计
2.1 软件设计思路
软件部分采用C语言来实现相关代码编写,主要是因为C语言具有较好的移植性,开发环境采用Kile5,STM32使用3.5版本的函数库。
水下机器人软件系统主要使用了姿态融合算法以及传统PID算法,考虑到控制的时效性相关算法均在5 ms定时器中断内完成,此外遥控数据接收也是通过中断来完成。大大保证了遥控数据的实时性,main函数里面做一些对实时性要求较低的工作。
2.2 C语言代码的实现
初始化函数主要完成对中断向量表、定时器中断、CAN控制器、PWM以及其他外设的初始化工作[3]。以下是几个主要的控制函数:
NVIC_Configuration():设置NVIC中断分组
RobotWH_Init():初始化硬件底层
moto_PwmRflash(&Can_data_step[0]):将推进器数据送达至相应PWM端口
RC_Analy():通讯协议的编解码
Prepare_Data():传感器数据的采集
Get_Attitude():态解算函数[6][7]
Control(angle.roll,angle.pitch,0):通过解算的姿态数据进行PID闭环控制。[8]

3 系统结构设计
便携式水下机器人整体采用流线型设计,整体尺寸为298×297×149 m。采用三个推进器为水下机器人提供动力,在水下机器人的中间位置设计有垂向推进器,左、右两侧位置设计有水平推进器。通过三个推进器即可实现水下机器人在各个方向的运动。水下机器人的整体结构如图2所示。
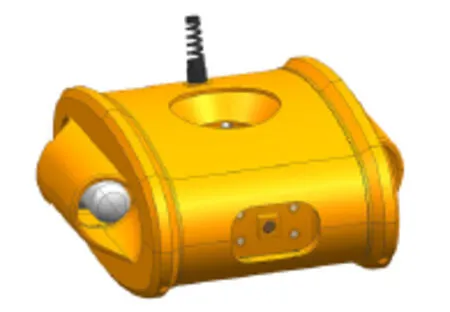
图2 水下机器人整体结构图
水下机器人的壳体分为上盖和下盖,均采用3D打印的方式制造。两侧的水平推进器通过安装架,安装在下盖左、右两侧的涵道内,中间的垂向推进器安装在上盖的垂向涵道内,用于实现水下机器人的上浮和下潜。左、右两侧的推进器差速转动,可实现水下机器人的转向运动。
内部设计有两个密封舱,分别安装在下盖的前后位置。后密封舱为电源舱,内部放置一个容量为6000 Ah的锂电池,为水下机器人提供能源,可实现水下机器人45分钟左右不间断工作。前密封舱为控制舱,内置有小型摄像头,LED灯和水下机器人的控制系统。
主体使用的是高透明亚克力材质,厚度为3 m,可承受100 深的水压。两侧的舱盖使用光固化3D打印方式加工制作,具有成型精度高的优点。密封舱与舱盖之间通过O型密封圈进行密封[4],电源线和控制线缆等通过水下穿线螺栓穿过舱盖[5]。其中,控制线缆穿出密封舱后,通过线卡穿出上盖。线卡固定在上盖的安装孔上,线卡内部有压紧螺栓可以将线缆固定。控制线缆连接地面遥控器,可以传输视频信号和控制信号。水下机器人的最大下潜深度可达100米。水下机器人的内部结构如图3所示。1-壳体,2-推进器,3-电源舱,4-线卡,5-控制舱,6-摄像头
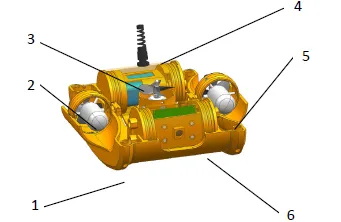
图3 水下机器人内部结构图
4 结论
将机器人样机放于体积4*3*3的水箱中测试机器人速度、俯仰角度、视频清晰度以及遥控稳定性等指标均达到实际应用水平,因此,本课题所研制的便携式水下机器人系统经初步测试可以达到实际需求,其中各项数据为取多次实验值去掉最大与最小值然后取平均值的方法获得,其中速度1.45 /s,静水最大倾斜角度48度,具有多方向实际应用推广性。
[1] 裴国栋, 温亚楠, 朱莉莉. 用于水下ROV控制的姿态融合技术研究[J]. 船电技术, 2018, (04): 56-58.
[2] 刘火良. STM32库开发实战指南[M]. 北京: 械工业出版社, 2017: 20-43.
[3] 张新民, 段洪琳. ARM Cortex嵌入式开发与应用[M]. 北京: 清华大学出版社, 2016: 14-21.
[4] 罗伯特.诺顿, 黄平.译. 机械设计[M]. 北京: 机械工业出版社, 2016: 33-52.
[5] CAD/CAM/CAE技术联盟. SolidWorks 2016中文版机械设计从入门到精通[D]. 北京: 清华大学出版社, 2017: 19-54.
[6] 卢大伟. 多传感器数据融合方法在新型组合导航系统中的应用[D]. 南京: 东南大学, 2001.
[7] 曾庆华, 张为华. IMEMS 速率陀螺芯片在MAV飞行控制系统中应用研究[J]. 测控技术, 2004, 23(2).
[8] 张静, 金志华. 空中平台航姿参考系统的设计[J]. 中国惯性技术学报, 2004, 12(2): 47-52.
[9] 杨徽. 水下机器人通讯与控制技术研究[J]. 船科学技术期刊, 2015, 7(3): 17-21.
Research on Attitude Fusion Technique for Underwater ROV Control
Pei Guodong, Bian Zewu, Wen Yanan
(Qingdao Academy for Opto-electronics Engineering, Qingdao 266019, Shandong, China)
TP242
A
1003-4862(2019)01-0014-03
2018-07-26
青岛市光电智库联合基金资助(GDZK-2017-16)
裴国栋(1991-),男,初级。研究方向:自动控制。E-mail: pei_guodong@foxmail.com
